| 1876�N�ɐݗ����ꂽ�D�y�_�w�Z���N���Ƃ���k�C����w�B�ȗ��A140�N�����o�ē���͕��w���A�@�w���A���w���A���w���A�H�w���A�b��w���A����w���A�o�ϊw���A��w���A��w���A�_�w���A���Y�w����12�w���A����ё�w�@��3�����ȁA17�w�@�A1���畔�A14�����@�A1�A�g�������Ȃǂɂ��\���B��w�E��w�@�����킹��1��8��l���i�����͂������2018�N4�����݁j�̊w�����D�y����є��ق�2�L�����p�X������E�����̋��_�Ƃ��ēW�J���Ă��܂��B
���̂����������������������w�@�H�w�����@�́A���p�����w�A���p���w�A�ޗ��Ȋw�A�@�B�F���H�w�A�l�ԋ@�B�V�X�e���f�U�C���A�G�l���M�[���V�X�e���A�ʎq���H�w�A���t�B�[���h�H�w�A�k����������H�w�A���z�s�s��ԃf�U�C���A��Ԑ��\�V�X�e���A���n���H�w�A���z�V�X�e����13����37������J�o�[�B�܂��k����������H�w����́A����n���ݍH�w����ыZ�p������w��2����ɕ�����A���������͌�҂Ɋ܂܂�܂��B
�@�h���C�o�[�s���ւ̒��ڂ���A���߂̎����^�]�ւƓW�J
�h���C�o�[�̍s���A���ɂ��̎��F���Ɋւ��錤�����x�[�X�Ƃ��Č�ʌv�悩���ʍH�w�A�Љ�E���S�V�X�e���Ȋw�A�y�؍H�w�Ȃǂ̗̈�ɂ킽��Љ�Ɏ����錤���J���Ɏ��g�ޔ����������B�����ɂ́A�l�X�ȃA���O�������ʎ��̖̂h�~��ڎw�����Ƃ̔��z���ʒꂵ�Ă��܂��B
���������̃h���C�o�[�s���ւ̒��ڂ́A���m�_���Ńh���C�o�[�̒����_�s���Ɋւ��錤���Ɏ��g��30�N�O�ɑk�邱�Ƃ��o���܂��B���̌�A�����̌����́u�h���C�o�[���������āA�����l���A�ǂ������s������������ʂǂ��Ȃ������v��ΏۂƂ��A���̒��œ��ɖ��ƂȂ�u�h���C�o�[�̃~�X�ɂ���ʎ��́v�Ƀt�H�[�J�X�B�h���C�o�[���~�X���N�����Ȃ����߂̑��Z�p�̌����J���ɓw�߂Ă��܂����B���ꂪ�ߔN�A�N���}���̂̐��\�����邱�ƂȂ���A�N���}�̐����̂��h���C�o�[����}�V�[���ɃE�F�[�g���ڂ�����A�Ɠ����͏q�ׂ܂��B
�u���ꂪ���A��ԑ傫���ς�낤�Ƃ��Ă��邱�ƂŁA�i�`���ŐG�ꂽ�悤�ȁj���������V���������ɂȂ��Ă��Ă���̂ł��v
���g�������^�]�������Ώۂɉ������̂́A5�N�قǑO����B�Ȍ�A��w�嗬�ƂȂ��Ă���ł��낤�����^�]�ɑ��A�����܂ł������^�]�̃V�X�e�����ł͂Ȃ��A���H�C���t�������鑤�̎��_�Łu�ǂ��������Ƃ����Ȃ�������Ȃ����v�ɂ��āA�h���C�o�[�s���Ƃ̊W�̒��ŒT�����Ă��Ă��܂��B
�������������߂̎�v�Ȏ��g�݂Ƃ��ċ�����̂́A��������O�q�́A�����ȓ��H�ǂɂ��u���H����̎��̌���Ɏ�����Z�p�����J���v�ɉ��債�A����������̌����ł��B
��́A��ʎ��̑�𐭍��̈�Ƃ���u�s�X�n�ɂ�����v���r�[�����H�Ɩ��ɂ��Ă̌����J���v�i������\�ҁF���������A�������Ԃ�2016�`2018�N�x��3�N�ԁj�B����́A��Ԃ̊X�H�ɂ����鉡�f���s�҂̎��̂�h���ׂ��A�h���C�o�[�ɂ�鉡�f���s�҂̔����𑁂߂����ɒ��ڂ������́B�����ł͎ԗ��̐i�s�����Ɍ����Ǝ˂��A�w�b�h���C�g�ƏƖ��������邱�Ƃŕ��s�҂̔����𑁂߂邱�Ƃ����҂����u�v���r�[�����H�Ɩ��v���X�H�����ɊJ�����܂����B
��������A����ۑ�i�u�����^�]�Љ�̎����ɕK�v�ȓ��H�C���t���ɂ��āv�j�ɑΉ������u�����^�]�Ɠ��̉w�����p�������Y��Ԃ��x����V���ȓ��H��ʎ{��Ɋւ��錤���J���v�i������\�ҁF�L�������E�����H�Ƒ�w�y�����A�������Ԃ�2017�`2019�N�x��3�N�ԁj�B����́A�l�������ɂ�������ʂ╨���̈ێ���������Ă���A�k�C���̔_�ѐ��Y�Ƃ�ό�����S���u���Y��ԁv�ɒ��ځB����ԂɏZ�ݑ������铹�H��ʊ���ڎw���A�����^�]�⓹�̉w�̊��p�̎������܂ޓ��H��ʎ{��̂�����ɂ��Č����J�����ł��B���������͓������ɎQ�悷�钆�ŁAUC-win/Road DS���̗p���Ă��܂��B
���̂ق������́A�����Ȗk�C���J���ǂ�NEXCO�����{�E�����{�E�����{�ANEXCO�����A�{�l�����̊e�Ђ𒆐S�Ɋw�O�Ƃ��A�g�B�Ⴆ�A�h���C�o�[�̎��F�����l�����A�ǂ̂悤�ȓ��H�Ɩ���g���l���Ɩ�����ԂɌ��₷�����A�Ƃ����������������s���Ă��܂��B
�@�~����ACC�𗘗p����h���C�o�[�̍s��������UC-win/Road DS�̗p
5�N�قǑO���甋�����������肵�������^�]�Ɋւ��錤���ł́A����܂łƓ��l�Ƀt�B�[���h�Ńh���C�o�[�s�����v������A�v���[�`�ł����B����ɑ��A2017�N�x�ɃX�^�[�g���������ȓ��H�ǂ̏����ɂ��Z�p�����J���i�u�����^�]�Ɠ��̉w�����p�������Y��Ԃ��x����V���ȓ��H��ʎ{��Ɋւ��錤���J���v�j�ւ̎Q��ł́AVR�Z�p�̊��p���O��Ƃ���܂����B���̑_���ɂ��ē����́A1�j�t�B�[���h�ł̎��Ԃɂ�鑖�s�ł͖�������������ݒ�ł��Ȃ����AVR�͎�����������ю����^�]�̍Č������������������ł̔�r���\�Ȃ��ƁA2�jVR��ŏՓ˂���悤�ȏ������Ă����A���Ȋ댯��Ȃ����ƁA��2�_�������܂��B
| �u�i���̌����ł́A�����H�ʂ⎋�E�s�ǂȂlj^�]������ɂ���v���̑����j�~�i�̓��H���Ŏ����j����낤�Ƃ����̂ł��B����Łi�Ⴆ�j�����w����x���������̂��i�t�B�[���h�ł́j����Ƃ������ƂŁiVR�����p���邱�Ƃɂ��܂����j�v
�������āA���Z�p�����J���ւ̉���ɓ�����A����������2016�N�H�ɐ\������������ۂɂ�VR�̊��p��z��B���Ƃ��Ɩ��ɏ��������s���Ă��������Ғ��Ԃ⍡��̌����Ɍ����A�g���錤���҂炩��A���̑�����UC-win/Road DS�𗘗p���Ă���A�u�i��������VR���j���̂�������A�t�H�[�����G�C�g�i��DS�j�ł́v�Ƃ̈�v�����g�[�����A���g�����ځB�����āA�����̑�w�⌤���@�ցA��ƂȂǂ�UC-win/Road DS�𗘗p���A����Ɋ�Â��_��������������Ȃǎ��іʂł��]���B���̊��Ɏ荠�ȉ��i�Ƃ������Ƃ���A�̗p�����߂��A�Ƃ����܂��B
|
|
 |
| UC-win/Road DS��~��ACC���p���̉^�]�s�������Ɋ��p |
|
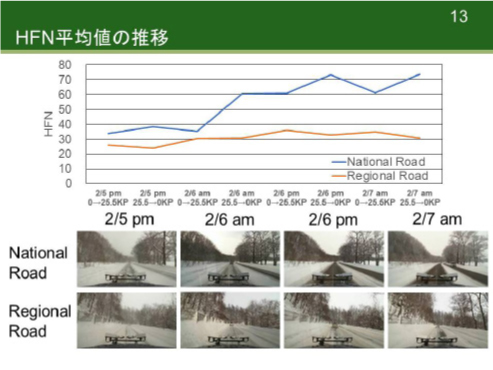
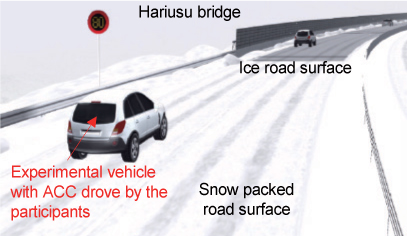
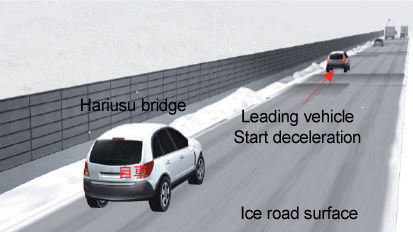
�������͂܂��A�~���̓��H���ɂ����鎩���^�]�V�X�e���̓���Ɋ֘A���A���H���̖������u�����^�]�V�X�e���̃Z���V���O�V�X�e���ł͌��m�ł��Ȃ��O���̘H�ʏE���E�Ȃǂ̃��X�N���ۂ������^�]�V�X�e���ɓ`���邱�Ɓv�Ɛݒ�B�������ł́A�u�~���̍������H�ŃA�_�v�e�B�u�E�N���[�Y�E�R���g���[���iACC�j�𗘗p���Ă���h���C�o�[���O���̊���₷���H�ʁi��ʘH�j�ɋN�����郊�X�N�����O�ɉ�����邽�߂̏��v�ɂ��Č������Ă��܂��B�����ŁA1�j�O���̒�ʘH�Ɋւ�������h���C�o�[�ɒ�����̉^�]�ƁA2�j��ʘH�Ɋւ�����ɉ����Ή����@���h���C�o�[�ɒ�����̉^�]�́A���ق��v���B�����ł͂����������Č��ł��Ȃ����߁ADS���g�����������g�ݍ��܂�܂����B
��������3�N�̏��N�x�i2017�N�x�j�͓���̊w��48�l���Q�����A��L���������{�B���̖T����g�܂ꂽ�ʂ̃v���W�F�N�g�̃t�B�[���h�����ŁA�H�ʂ̊���݂̂Ȃ炸���H���`�̉e�����傫���Ƃ̌��ʂ�������܂����B�����ŁA����2�N�ځi2018�N�x�j�͑O�N�x�Ƒ�����ʂ�ς��A���H���`�̗v�f���������v�ɂ��A�w��32�l���Q�����ē��l�Ɏ������s���Ă��܂��B
�@�����̍ŏI�N�x�ƍ����VR���p
�u�iUC-win/Road�́j���H���iVR�Łj�Č�����͍̂��₷���A���ۂ̓��H�ɋ߂����m�ɂ͂����Ȃ�܂����v
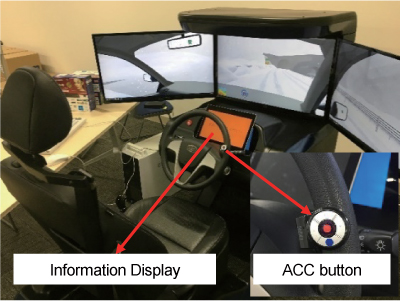
��������Ŏg��ꂽVR�́A����������UC-win/Road��p���Ď������ƂȂ�n�`�f�[�^���쐬�B�t�H�[�����G�C�g���ŃV�i���I�ɏ��������������AUC-win/Road�ɑ���Ȃ��@�\���J�X�^�}�C�Y���ėp�ӂ�����A�Ɛ����T�|�[�g�B���̏�ő�w���������V�i���I���ŏI��������`�Ői�߂��܂����B���������v���Z�X��ʂ��AUC-win/Road�́u�֗��ȕ����͑傫���v�Ƃ��������b�g�ƂƂ��ɉۑ�������B�����܂��A�ŏI�N�x�i2019�N�x�j�͎����^�]�̃V�X�e���������ς��A�O�N�x�Ɠ��l��VR��p�����������J��Ԃ��l���A�Ɣ��������͌��܂��B
�u�i�����ł́j�����^�]�ƃh���C�o�[�̃C���^���N�V�����𗝉����邽�߂ɁAVR���g���Ă��܂��B������x�[�X�ɁA�����^�]�����鎞�̂��ǂ��C���^�[�t�F�[�X���J��������A�h���C�o�[���G���[���N�����Ȃ����H�ɂ�����A�Ƃ������Ƃ֏����I�Ɍq���Ă��������Ǝv���Ă��܂��v
|