Cloud Programming World Cup 第2回 学生クラウドプログラミングワールドカップ
受賞作品・審査結果 ('14.11.25)
|
 |
The 2nd Cloud Programming World Cup
第2回 学生クラウドプログラミングワールドカップ
〜開発キット(SDK)によるクラウドアプリのプログラミング技術を競う!〜

|
Cloud Programming World Cup 第2回 学生クラウドプログラミングワールドカップ(主催:CPWC実行委員会)のエントリー総数は9チーム(日本4、海外5)となり、6チーム(日本3、海外3)がノミネート。2014年11月21日、品川インターシティホールに於いて、最終公開審査を経てワールドカップ賞及び4つの審査員特別賞が決定いたしました。
ワールドカップ賞(最優秀賞) 賞金30万円!
| ■ 作品応募賞(Participation Prize) |
|
規定のとおり応募されたすべての作品に対し、作品応募賞賞状が贈られます。
(応募内容に不足や規準に適合しないものがある場合は、対象外となります) |
|
  |
閲覧手順 |
|
 |
 |
|
ワールドカップ賞 |
| 作品タイトル : Kinect Smart Drive |
| チーム名 : Great Sword |
|
| 所属 : Shanghai Jiao Tong University |
参加国名 : 中国 |
|
 データ概要 データ概要 |
|
Kinect Smart DriveはKinectドライブとスマートドライブ (自動走行アシスト) を連携し、ユーザはこれをUC-win/RoadでKinect センサーと共に使用することができます。Kinectを持っていないユーザーは、スマートドライブ機能を使用することで利用できます。これはただのソフトウェアプラグインというわけではなく、ゲームシステムとしても利用でき、自動運転に関する研究にもお使いいただけます。楽しく使っていただけると幸いです。
|

|
|
作品を鑑賞
|
|
 |
|
審査員特別賞 環境設計情報学賞
福田 知弘 氏
(大阪大学 大学院工学研究科 環境・エネルギー工学専攻 准教授) |
作品タイトル : Analysis of drive behavior in shared spaces and
architecture of large scale simulation environments |
| チーム名 : Chocolat |
|
| 所属 : 椙山女学園大学 |
参加国名 : 日本 |
|
| データ概要 |
|
オランダ人交通学者のHans Monderman氏が提唱した「Shared space (共有空間)」において、運転初心者が仮想空間での運転を体験できることを目的としたプラグインです。これは一風変わった交通概念で、ヨーロッパで広く利用されています。この共有空間の概念に基づく町は、信号機や交通標識の使用を最小限に抑え、ドライバーと歩行者どちらもの安全意識が高まります。日本では2011年に、京都で既に試行されていますが、まだまだ日本では一般的ではありません。そのため運転初心者のための共有空間でのシミュレーションが行えるプラグインの開発を行いました。
まず始めに、「Roundabout (ラウンダバウト)」と言われる交差点に注目しました。ラウンダバウトとは共有空間として頻繁に利用される信号なしの交差点です。ラウンダバウトは、その中心に円の空間をもち、運転車両はこの円の周りを、一方通行に運転する必要があります。最近では、ラウンダバウトは日本でも、規制の緩和により導入することも可能です。今回は愛知県一宮市に実際にあるラウンダバウトを基にした仮想の街を作りました。
また仮想の街で、ドライバーに指示を与えるナビゲーション機能が必要となります (直進、右折、円に沿って運転など)。ナビゲーション機能の実現のため、「Chocolat」というプラグインを開発しました。このプラグインによりナビゲーションの指示がテキストや画像で簡単に画面上に表示されます。ナビゲーション指示のトリガー条件はX,
Y, DX, DYで与えられます。それぞれ、XとYは車両の位置、DXとDYは車両の方向を表します。 |

|
|
作品を鑑賞
|
|
 |
|
審査員特別賞 無人車・自動走行車賞
羽倉 弘之 氏
(三次元映像学会 代表幹事
デジタルハリウッド大学大学院 特任教授) |
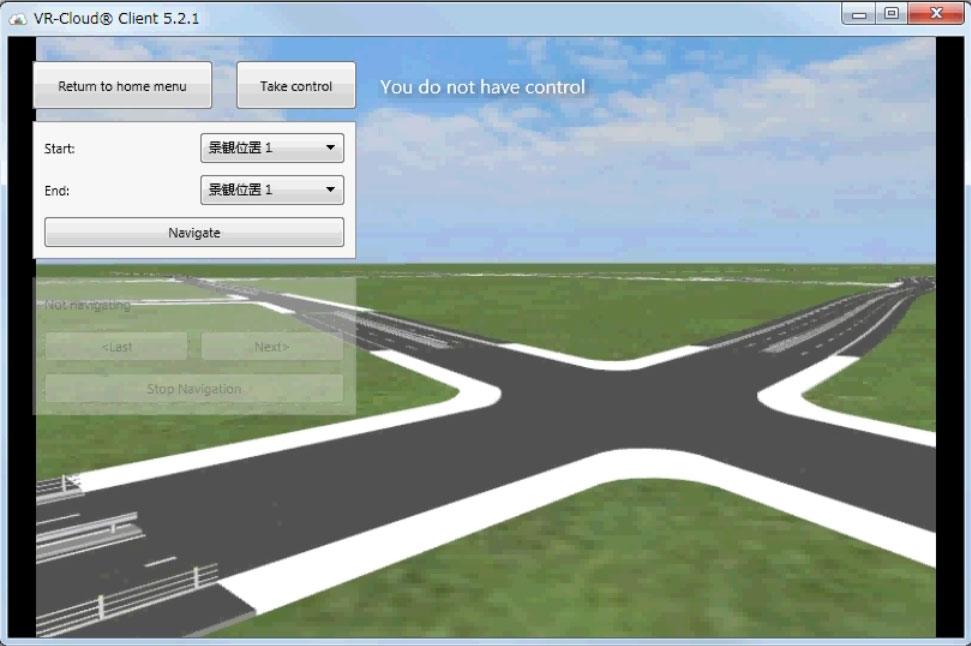
| 作品タイトル : Building of a test environment for automatic driving systems |
| チーム名 : SDL |
|
| 所属 : 九州大学 |
参加国名 : 日本 |
|
| データ概要 |
|
近い将来に自動運転システムを実現させることを目的とする様々な研究がなされています。この動きの一部として、このプラグインを構築し、どのような挙動や交通事故が分岐合流点で起こり得るのかを検証しました。また今後方向指示器をシナリオイベントの出口条件に追加する予定です。
|

|
|
作品を鑑賞
|
|
 |
|
審査員特別賞 クラウドソーシング賞
楢原 太郎 氏
(ニュージャージー工科大学
建築デザイン学部 准教授) |
| 作品タイトル : Openstreetmap import and navigation plugin |
| チーム名 : Torneko |
|
| 所属 : Shanghai Maritime University |
参加国名 : 中国 |
|
| データ概要 |
|
道路のネットワークデータを迅速に配置する方法にフォーカスしたプラグインで、UC-win/Roadを使用して交通表現を可能にしています。
OpenStreetMapデータを道路ネットワークデータのソースとして選択することで、自由さと迅速さを可能にしています。VR-Cloud®を使用して、ルートナビゲーション機能を実現しており、これによりユーザはデザイナーとしてではなく、ナビゲーション機能の使用を可能にしています。 |

|
|
作品を鑑賞
|
|
 |
|
審査員特別賞 リアルワールドアプリケーション賞
ペンクレアシュ・ヨアン 氏
(フォーラムエイトVR開発テクニカル・マネージャ) |
| 作品タイトル : Driving Support Plugin |
| チーム名 : Kaisers |
|
| 所属 : 関西大学 |
参加国名 : 日本 |
|
| データ概要 |
|
このプラグインにより、CANloggerでログを取った車両制御情報を使用して、シミュレーション内での実際の世界での運転や道路条件の再生が可能です。
交通渋滞へ向かう状況で警告を表示することで、シミュレーションを使用した交通渋滞回避のための運転走行を練習することができます。 |

|
|
作品を鑑賞
|
|
|
■CPWC審査委員長 福田知弘氏による講評
第2回学生クラウドプログラミングカップ(CPWC)は、VRソフトウェアの新たな可能性を追求するもの。CPWCへの参加を通じて、学生の企画力、システム開発能力、プレゼンテーション能力等の向上を図ることを目指している。また、実際のアプリケーションの開発を通じて、コンテンツの新たな可能性も追求できれば、と考えている。
2年目を迎えた本年は、4月よりエントリーをはじめ、6月末までに提出された8つのエントリシートを対象に7月にハワイで予選選考会を実施した。この時点では全て予選通過としましたが、10月のノミネート審査に向けて、強化してほしい点を具体的にフィードバックさせて頂いた。そして、10月10日までに8作品の完成版が提出され、ノミネート審査で6作品に絞られ、最終審査に進むこととなった。そして、11月20日には各チームが東京・品川に集い、最終プレゼンテーション。最終審査の結果、グランプリとなったGreat Sword(上海交通大学)の作品「Kinect Smart
Drive」は、KinectとUC-Win/Roadとの連携を行うシステムであり、完成度が高く、また、今後の拡張が期待できるソフトウェアであった。
昨年度と比較すると幅広い分野の作品応募があった。他の受賞作品を紹介しておこう。環境設計情報学賞を受賞したChocolat(椙山女学園大学)はラウンドアバウトをテーマとしたもの、無人車・自動走行車賞を受賞したSDL(九州大学)は自動運転シミュレータに関するもの、クラウドソーシング賞を受賞したTorneko(上海海事大学)はOpen Street Mapデータを利用したもの、リアルワールドアプリケーション賞を受賞したKaisers(関西大学)は車両制御情報を応用したもの、であった。
CPWCは次年度も実施予定である。世界中からの応募を期待したい。 |
|
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|