|
|
|
|
|
|
|
|
|
|
|
 |
|||||
|
|
||||||
Academy User by Ieiri Lab. vol.2埼玉工業大学工学部機械工学科下山研究室人間にとって走りやすいクルマと道路の関係を追求 Academy Information埼玉工業大学 工学部機械工学科 人間中心設計工学研究室URL ● http://www.sit.ac.jp/laboguide/kougaku/kikaikougaku.html#anchor06 所在地●埼玉県深谷市普済寺1690番地 研究内容●ドライビングシミュレーターを活用し、人間と機械の両方を考えた「ヒューマンセンタードデザイン(人間中心設計)研究」を行っている。主な研究テーマは安全で使いやすい運転支援システム、ドライバー運転特性、高性能車両設計など。 埼玉工業大学工学部機械工学科の下山研究室は「人間にとって走りやすいクルマと道路のあり方」を追求する「人間中心設計工学」を専門としている。ドライバーの高齢化や自動運転システムなどの課題を解決するため、下山修教授のリーダーシップのもと、フォーラムエイトのリアルタイムバーチャルリアリティーシステム「UC-win/Road」とドライビングシミュレーターを使って、実車では不可能な様々な研究成果を上げている。 
▲埼玉工業大学キャンパス 人間と機械の両方を考える「人間中心設計」を追求 ▲UC-win/Roadを研究に活用する埼玉工業大学 人間中心設計工学研究室の実験室。左端が下山修教授。 最近、少子高齢化によりドライバーも高齢化したり、女性ドライバーが増えたりと、ドライバーの経験や能力が様々なクルマが同じ道路を走行するようになっている。 一方、IT(情報通信技術)による自動車技術の進展もめざましい。先行車との衝突を防ぐ自動ブレーキや歩行者をよける自動回避操舵(そうだ)、そして人間がハンドルやアクセル、ブレーキを操作しなくても走行できる自動運転カーなどが続々と開発され、実車にも搭載されている。 こうした状況を踏まえ、埼玉工業大学工学部機械工学科の下山研究室では、下山修教授が中心となり、自動車技術の高度化だけでなく、自動車が本当に人に役立ち、間違いなく使われるようにするため、人間側の行動や反応などに着目した研究を行っている。人間と機械の両方を考えた「ヒューマンセンタードデザイン(人間中心設計)」という分野だ。 その研究ツールとして欠かせないのが、フォーラムエイトのリアルタイムバーチャルリアリティーシステム「UC-win/Road」と、ドライビングシミュレーターなのだ。 「東京大学生産技術研究所の博士課程で研究していたとき、東大の建築学科と街路に面する店舗の入りやすさが板の大きさや配置、駐車場の形などでどう変わるのかを、共同研究したことがありました。そこで『UC-win/Road』と出会って以来、研究に欠かせないものになりました」と下山教授は言う。 実車では不可能な実験が可能に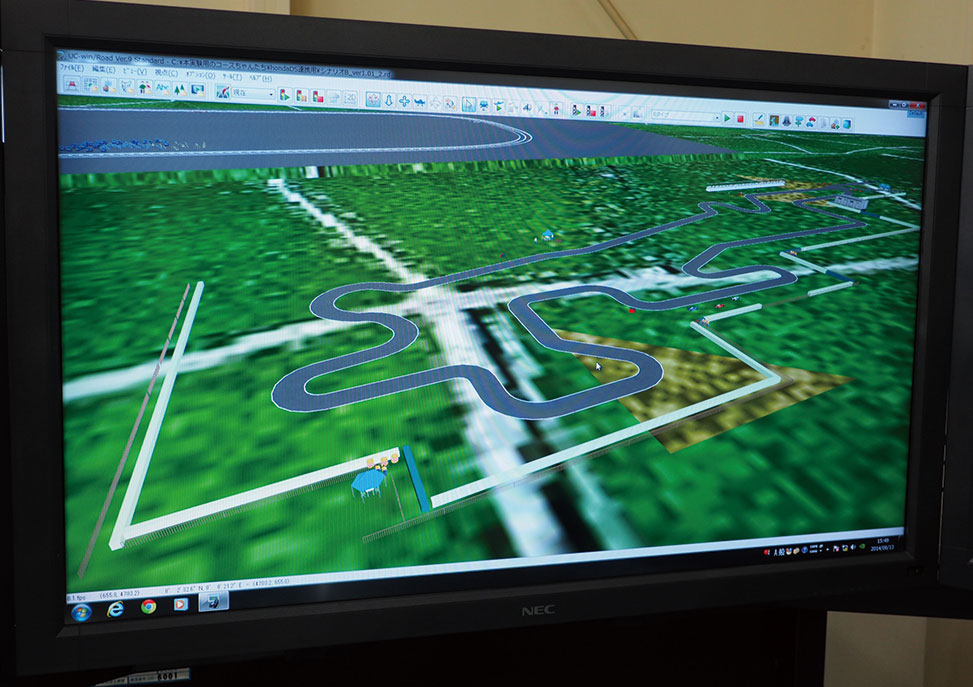 ▲UC-win/Roadで作成した実験用のコース 研究で重要なのは、同じ条件下で性別や年齢、運転経験などが異なる被験者ドライバーがどのような運転行動を示すのかを比較することだ。例えば太陽の位置、路面の温度や天候といった自然条件や、周囲のクルマの量や速度、歩行者の数といった交通条件、さらには路面の温度などがそれぞれの被験者で同じ条件にする必要がある。 同じ被験者に、時期を変えて同じ実験を行うときも前回と同じ条件を再現することが求められる。 また、歩行者の飛び出しや、先行者の急ブレーキに対する反応などの危険を伴う実験は、実車では行いにくい。 埼玉工業大学は、UC-win/Roadやドライビングシミュレーターを導入したことで、従来、実際の道路と実車では不可能だった実験が可能になった。 「ドライブシミュレーターはホンダ製のものを5年ほど前に導入しました。UC-win/Roadとドライブシミュレータプラグインを使うことで、道路の線形や天候、交通量などの条件を自由に設定でき、何回でも同じ条件で実験できるので研究にはとても役立っています」と下山修教授は語る。 車間距離を人間にどう伝えるか
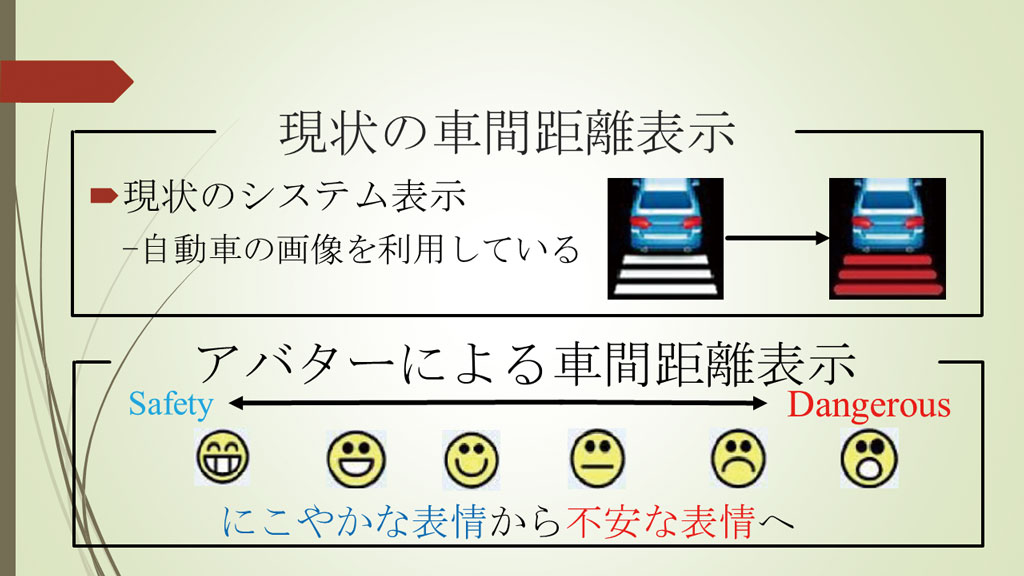
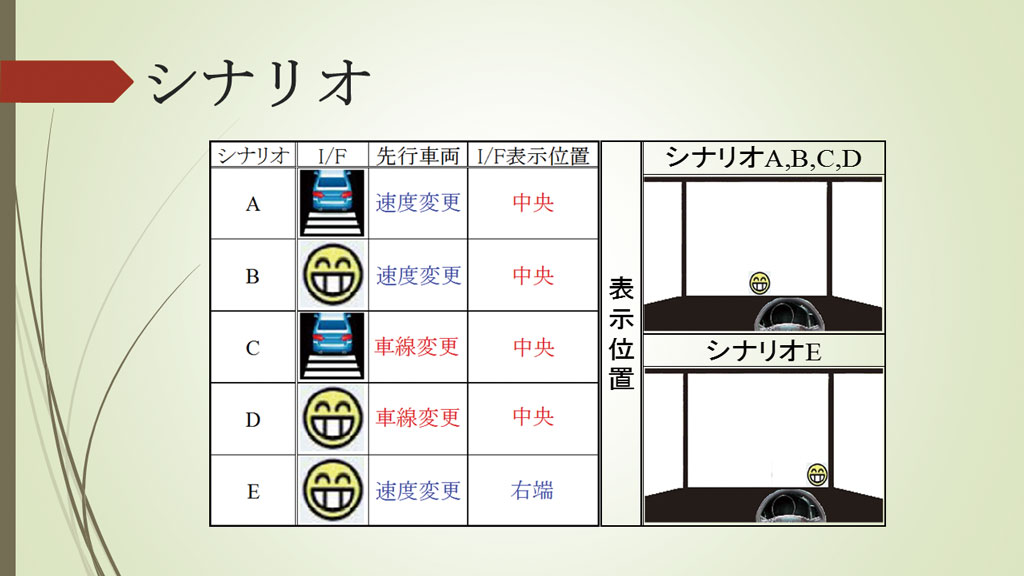
自動ブレーキや自動運転など、運転支援システムの技術革新が進んでいるが、システムへの依存や過信があれば事故の原因となる。そこでドライバーが車間距離を認識しやすくするには、どんな方法が有効かを探るため、ドライビングシミュレーターとUC-win/Roadを使って「車間距離直感インターフェースの研究」を行った。 ドライビングシミュレーターのダッシュボードに、(1)現在のクルマでよく使われている自動車の画像とバーの数で車間距離を示すマークを表示する場合と、(2)車間距離の大きさによって、にこやかな表情から不安な表情に変わる「アバター」を表示した場合、どちらがわかりやすいかを実験したのだ。 「自動運転システムが実用化されたとは言え、走行速度や隣を走るタンクローリーなどの影響で誤動作した例も報告されています。ドライビングシミュレーターを使った実験なら、万一、交通事故が起きても安全で、どの被験者も同じ条件で走行できるという高い再現性を確保できます」(下山教授)。 被験者となったのは19〜33歳の男性9人で、運転歴4年以上(A群、7人)と4年未満(B群、2欄)のマークやアバターの別や表示位置、先行車両の動きを変えて5つのシナリオに分け、その他の条件は同じにして実験を繰り返した。 その結果、運転経験が少ないドライバーにはアバターによる表示が直感的にわかりやすく、表示する位置はドライバーの中央でも右側でも変わらないことが明らかになった。人の顔は、人間が意識しやすく、表情の変化に敏感であることもわかった。
路面標示を運転支援に生かす
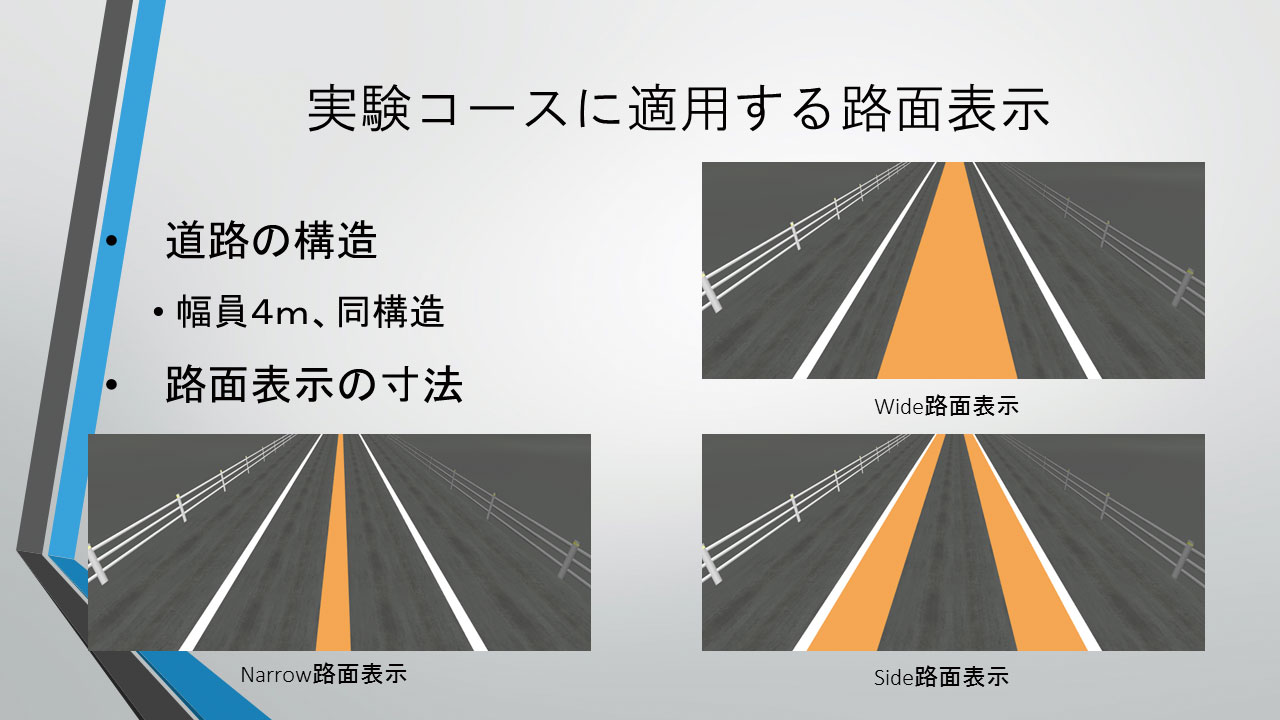
自動ブレーキや車線を自動的に維持する「レーンキーピングアシスト」などのシステムが普及すると、ドライバーは運転をクルマに依存して、運転に対する主体性を失うことになりかねない。また、最近は高齢者と初心者の事故が増えており、初心者はカーブでの事故発生率が全運転者の1.6倍と際立っている。 そこで、下山研究室は「路面表示を用いた運転支援の研究」を行った。半径20m、25m、100mの3種類のカーブと直線を組み合わせた1周2650mの実験コースをUC-win/Roadでモデル化し、ドライビングシミュレーターによって各被験者に4周ずつ走ってもらうという実験だ。 道路幅員は4mとし、路面標示には車線中央部に太いオレンジ色の帯を描いた「Wide」と、細い帯を描いた「Narrow」、そして車線の両側に帯を描いた「Side」の3種類を用意した。 そしてUC-win/Roadを使って運転時にドライバーの運転軌跡やハンドルの操作量など、様々なデータのログを記録し、車線位置逸脱面積を計算した。 データを分析した結果、速度30km/h、曲率半券20mといった低速で小さな半径のカーブでは、「Side路面標示」による運転支援が有効であることがわかった。そして運転頻度が週1回以下、年間走行距離1000km以下の運転経験が少ないドライバーに効果的だった。Side路面標示を行うことによって、周回ごとに車線からの逸脱量が安定することもわかった。 このほか、ドライバーの心拍数や脳の血流が運転中にどのように変化するかといった実験にも取り組んでいる。
レーシングドライバーの経験を研究に生かす下山教授は学生時代から “レースの鬼”だった。学生時代はレーシングカートのドライバーとして自らハンドルを握り、前職の日産自動車時代は入社早々にレーシングチームに配属された。その後、同社の中央研究所に移動した後は、技術者としてレースラリー車の設計や、4WD車やサスペンションシステムの開発を通して「いかに人間が走りやすい特性を実現するか」ということに没頭してきた。 2012年に現在の埼玉工大に移ったが、レースドライバーとしての実体験は今も研究の根底にある。ハードやソフトの性能を上げるだけでなく、ドライバーの心理や反応なども考慮したうえ、人間にとって使いやすいクルマの実現を常に意識して研究や開発に取り組んでいる。 レースとのかかわりは今も続いている。2011〜12年には全日本学生フォーミュラ大会の大会実行委員長を務めたほか、同大会に出場する埼玉工大チームの指導も行っている。 今年からは自動運転システムのマニュアルをゲーム化する研究にも取り組んでいる。「自動運転システムを使いこなすためには、単に自動運転に任すだけではなく、自動運転と手動運転の切り替えや、自動運転化する範囲の設定など、スキルや知識に応じて使える範囲を広げていく必要があります。これはゲームであるステージをクリアすると次に進めるということに似ています。この考え方を自動運転のマニュアルに応用できないかと思いました」と下山教授は言う。 理論を実現象として人間に対して再現できるUC-win/Roadとドライビングシミュレーターによって、下山研究室が取り組めるテーマは無限にあると言っても過言ではない。今後ともユニークで実践的な研究成果が出てくることが期待できそうだ。  ▲全日本学生フォーミュラ大会に出場した埼玉工大チームのカート |  
     >> 製品総合カタログ  >> プレミアム会員サービス >> ファイナンシャルサポート
|
ソフトウェア/支援サービス
|
|||||||