| New Products |
|
|
提案システム |
●リリース 2011年
シミュレーション |
|
|
「UC-win/Road模型VRシステム」は、W16メンバーでもある大阪大学大学院・福田知弘准教授のアイデア・技術協力により開発されました。模型とVRの視野情報を連携させて一体的な操作環境で提供する技術により、双方の長所をミックスさせた、新しい形のシミュレーション/プレゼンテーションシステムです。
専門性や知識レベルの点でさまざまである複数の関係者に対して、情報をわかりやすく的確に伝達し、計画検討や合意形成を効果的に進めることができます。
|
VRは表現力や柔軟性が高く、交通流の表現や天候条件の変更など、模型では不可能なさまざまな検討が行えます。一方で、距離や規模など計画全体像の把握という面では、模型の方が直感的といえるでしょう。模型には、複数の人々が同時に任意の視点から検討できること、都市全体を一度に把握できること、検討者が直接触れられることなどの長所があります。
UC-win/Road模型VRシステムでは、VRと模型を組み合わせることで、VR単体の場合に比べてより直感的で容易な操作による計画検討が可能となっています。また、弊社で展開中の「3D模型サービス」を活用すれば、UC-win/RoadのVRデータを3Dプリンタで模型として短時間で出力可能なので、模型VRシステムを効率的に構築できます。
|
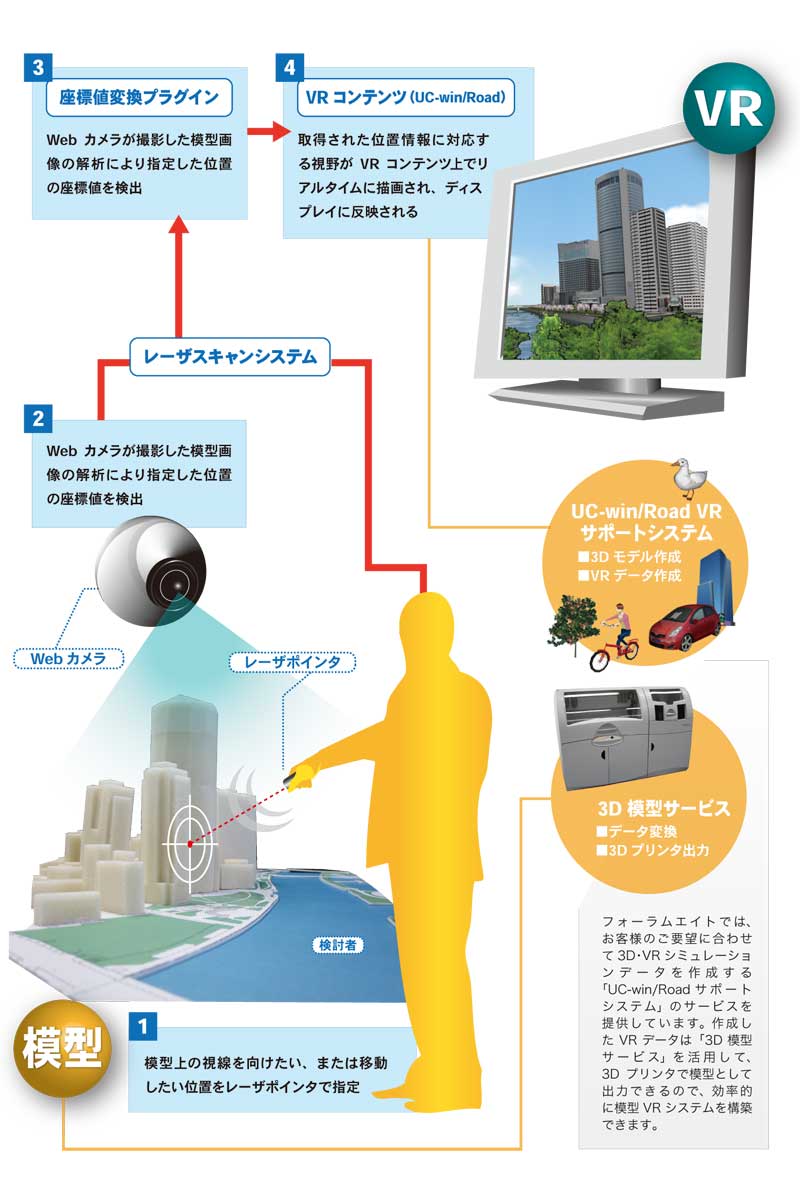
「UC-win/Road模型VRシステム」では、レーザーポインタを使用して検討したい視点を模型上で指し示すことで、VR空間内での移動や視線方向の変更が行えます。
システムは模型、Webカメラ、レーザポインタ、VRソフトウェア「UC-win/Road」、VR空間を表示させるディスプレイによって構成され、全体としては、レーザポインタの操作を検出する部分と、検出した情報をUC-win/Roadに渡してVR空間に反映させる部分とに分かれています。
フォーラムエイトでは、お客様のご要望に合わせて、UC-win/Road模型VRシステムの提案およびお見積りをご用意いたします。ぜひご利用ください。
 |
|
|
|
|
| 模型上方に設置されたWebカメラで撮影した画像の処理を行い、模型につけられた「マーカー」を基にレーザポインタで指示された位置の座標を検出。さらに、検出された座標値をVR座標系に変換することで、模型上とVR上での位置を同期させる(模型座標系の定義にあたっては、基盤ソフトウェアのライブラリとしてARToolkit(※)を利用)。 |
|
UC-win/Road SDKで開発されたUC-win/Roadのプラグインを用いて、取得したVR座標をUC-win/Roadに読み込ませ、対応する視野の景観をVR上で描画させる。 |
|
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|



