| 商品名 / 型番 |
RoboCar(R) / ZMP RC-Z |
| サイズ / 重量 |
429.0 x 195.0 x 212.2,約3kg (最大1kgまで追加積載可能) |
| システム基本構成 |
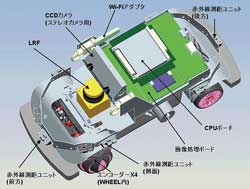
ステレオカメラ |
VGA CCD 30fps (x2) |
| 画像認識モジュール |
ZMP製モジュール (IMAPCAR(R) : NEC製並列プロセッサ) |
| メインコントローラ |
CPU : AMD Geode(R) LX800 Processor 500MHz |
| 通信モジュール |
Wi-Fi通信モジュール IEEE802.11 b/g/n |
| 内界センサ |
ジャイロ1軸 |
| 加速度3軸 |
| ロータリーエンコーダ (車輪 x4,駆動モータ軸 x1) |
| 外界センサ |
赤外線測距センサ (x8) |
| レーザレンジファインダ *オプション |
| シャーシ,フレーム |
カーボンFRPシャーシ,ダブルウィッシュボーンサスペンション,ZMP製アルミフレーム |
| モータドライバ |
ZMP製モジュール |
| サーボモータ |
ロボット用サーボモータ |
| 駆動用モータ |
小型DCモータ |
|
バッテリ |
制御システム用バッテリー 単三ニッケル水素電池 (x12)
駆動用バッテリー ニッケル水素バッテリパック (x1) 7.2V |
| メインコントローラ OS |
Linux (ソフトリアルタイム) |
| コントロールソフトウェア |
制御ソフトウェア, ZMPライブラリ, ネットワークソフトウェア |
| 画像処理プロセッサ |
専用コード |
| OS |
Windows(R) / Linux |
| 開発環境 |
gcc |