â—ڈS-PARAMICS, SIASى—گ 대ي•´ى„œ
م€€SIASëٹ” 다ى–‘ي•œ ëڈ„ë،œ êµگي†µى´ë‚ک êµگي†µيگ름ىک 문ى œى—گ 대ي•œ ى§€ى‹ê³¼ ى§€ى›گى„ ى œê³µي•کëٹ” êµگي†µ 계يڑچ ى»¨ى„¤ي„´يٹ¸ يڑŒى‚¬ى…니다. ى£¼ىڑ” ê±°ëکى²کëٹ”
ê³µى پ 기관과 민간 부문ىک 개발ىگë،œ, ىکپêµى—گى„œëٹ” 마ى´يپ¬ë،œ ى‹œë®¬ë ˆى´ى…ک 기ىˆ ى„ ى²کىŒ ى±„ىڑ©ي•œ يڑŒى‚¬ى…니다.
م€€يک„ى¬ 50ëھ…ىک 기ى—…ىœ¼ë،œ, 1974ë…„ى—گ ى—گë“ ë²„ëں¬ى—گى„œ ëں°ëچکىک SIA Limitedى§€ى‚¬ë،œىچ¨ ى„¤ë¦½ëگکى—ˆىٹµë‹ˆë‹¤. 당ى‹œ, يŒگ매ëگœ ê°€ىڑ´ëچ° ىœ ëں½
ىµœê³ 급 ى»´ي“¨ي„°(CDC6600)를 ى‚¬ىڑ©ي•کى—¬, يک„ى¬ ê³¼ي•™ë°•ë¬¼ê´€ى—گى„œ ى „ى‹œëگکê³ ىˆىٹµë‹ˆë‹¤. 1988ë…„ى—گ ىٹ¤ى½”ي‹€ëœë“œ ىڑ´ىکپ부ى—گ 매ê°پëگکى–´ يچ¼ىٹ¤,
글ë¼ىٹ¤ê³ , ëں°ëچک, ê·¸ë¦¬ê³ ë²„ë°چي–„ىœ¼ë،œ ىک¤ي”¼ىٹ¤ë¥¼ ي™•ى¥ي–ˆىٹµë‹ˆë‹¤. ى•„마ëڈ„ ى²¨ë‹¨ 기ىˆ ى„ ى±„ىڑ©ي•œ ى—ى‚¬ë،œë¶€ي„° SIASى‚¬ê°€ ي•ىƒپ êµگي†µ ي•´ى„ê³¼
계يڑچ 방법ى„ 개발ي•کëٹ” ى…ى¥ى„ 계ى†چ ىœ ى§€ي•´ ى™”ë‹¤ê³ ي•کëٹ” ى گىœ¼ë،œë¶€ي„°, 1990년대ى—گ ىƒپ무 ى´ى‚¬ى—گ게 OBE(Order of the British
Empire : 대ىکپى œêµ ي›ˆىœ„)ê°€ ىˆکى—¬ëگکى—ˆىٹµë‹ˆë‹¤.
م€€SIASëٹ” S-PARAMICSë¼ê³ ي•کëٹ” êµگي†µ 마ى´يپ¬ë،œ ى‹œë®¬ë ˆى´ى…ک ى†Œي”„يٹ¸ى›¨ى–´ىک 개발ىگى´ê¸°ëڈ„ ي•کë©°, ى»¨ى„¤ي„´يٹ¸ë،œىچ¨ىک ىک¤ëœ ى„¸ى›”ىک ي™œëڈ™ى„
ى†Œي”„يٹ¸ى›¨ى–´ىک ى‚¬ى–‘ى—گ 계ى†چي•´ى„œ ë°کىکپي•کê³ ىˆىٹµë‹ˆë‹¤. ê±°ëکى²کى™€ ê°™ى€ ى• ي”Œë¦¬ى¼€ى´ى…کى„ ى‚¬ىڑ©ي•¨ىœ¼ë،œىچ¨, ىکپêµى—گى„œىک êµگي†µ 계يڑچ 비ى§€ë‹ˆىٹ¤ê°€ ê·¹ي•œى—گ
달ي–ˆىٹµë‹ˆë‹¤. ىٹ¤ى½”ي‹€ëœë“œ 당êµىک êµگي†µê³¼ ىڑ´ى†،ىک ê³ ë¬¸ىœ¼ë،œىچ¨ 근무ي•کê³ ىˆëٹ” ى‹¤ى پى„ ê°€ى§€ê³ ىˆىٹµë‹ˆë‹¤.
â—ڈS-PARAMICSي”Œëں¬ê·¸ى¸
â– ê°œىڑ”
م€€ىµœى²¨ë‹¨ىک êµگي†µ 마ى´يپ¬ë،œ ى‹œë®¬ë ˆى´ى…کê³¼ UC-win/Road를 ى—°ê³„ى‹œي‚´ىœ¼ë،œىچ¨ êµگي†µ ي•´ى„ê³¼ 3D버ى¶”ى–¼
리ى–¼ë¦¬ي‹°ىک ë² ىٹ¤يٹ¸مƒ»ىک¤ë¸Œمƒ»ë¸”리드 ى‹œىٹ¤ي…œى„ ى‹¤يک„ي•ک기 ىœ„ي•´ى„œ, ى´ë²ˆى—گ ëڈ„ë،œ يک•ىƒپ ëچ°ى´ي„°ىک êµگي™کى„ ى‹¤ى‹œي•کëٹ” S-PARAMICSى—°ê³„ ي”Œëں¬ê·¸ى¸ى„
개발ي–ˆىٹµë‹ˆë‹¤.
ى „ى²´ 계يڑچىœ¼ë،œىچ¨, êµگي†µ ي•´ى„ىک 결과를 UC-win/Roadى—گى„œ ê°€ى‹œي™” ي• ىˆک ىˆëڈ„ë، 개발ى„ 계ى†چي•کê³
ىˆىٹµë‹ˆë‹¤.
ى—¬ê¸°ى—گى„œëٹ”, ëڈ„ë،œ 네يٹ¸ى›Œيپ¬ êµگي™ک 기ëٹ¥ى„ ى†Œê°œي•©ë‹ˆë‹¤.
م€€ëڈ„ë،œىک يک•ىƒپ ى •ë³´ë¥¼ êµگي™کي•ک기 때문ى—گ, ى–‘ىھ½ ى• ي”Œë¦¬ى¼€ى´ى…کى—گى„œ ê°™ى€ يک•ىƒپىک ëڈ„ë،œ 네يٹ¸ى›Œيپ¬ë¥¼ ê°€ى§€ëٹ” 것ى´
ê°€ëٹ¥ي•©ë‹ˆë‹¤.
개발ى¤‘ى¸ S-PARAMICS/OpenMicroSimىک êµگي™کيˆ´ى´ ى™„ى„±ëگکë©´, S-PARAMICSى—گى„œ ي•´ى„ي•œ 결과를 ê°€ى‹œي™”ي•کëٹ” 것ى´
ê°€ëٹ¥ي•ک게 ëگ©ë‹ˆë‹¤. ê·¸ ë•Œ, ëڈ„ë،œى™€ ى°¨ëں‰ىک ىœ„ى¹ک 관계ىک ىœ ى§€ى—گ ى´ë²ˆى—گ 릴리ىٹ¤ي•کëٹ” S-PARAMICSë³€ي™ک ي”Œëں¬ê·¸ى¸ى´ يپ¬ê²Œ
기ى—¬ي•©ë‹ˆë‹¤.
UC-win/Roadىک ê°€ىƒپيک„ى‹¤(VR)ى—گى„œ 경관, ëڈ„ë،œ ى„¤ê³„, êµگي†µى„ 간단ي•ک게 ê²€ي† ي•کê³ , ي•œى¸µ ëچ” ë“œë¼ى´ë¹™
ى‹œë®¬ë ˆى´ى…کىœ¼ë،œ ىڑ´ى „ىگىک ى‹œى گىœ¼ë،œë¶€ي„° ëڈ„ë،œ ىƒپي™©ىک ي™•ى¸ى´ ê°€ëٹ¥ي•©ë‹ˆë‹¤. ê·¸ë¦¬ê³ , ê³ ى •ë°€ىک êµگي†µ ى‹œë®¬ë ˆى´ى…کى„ ى‹¤ى‹œي•کëٹ” ê²½ىڑ°ëٹ”, 본 ي”Œëں¬ê·¸ى¸ى„ ىœ يڑ¨ي•ک게
ي™œىڑ©ي• ىˆک ىˆىٹµë‹ˆë‹¤. UC-win/Roadى—گى„œ ى‘ى„±ي•œ ëڈ„ë،œ 네يٹ¸ى›Œيپ¬ë¥¼ ë³€ي™کي•کى—¬, S-PARAMICSى—گى„œ ي•„ىڑ”ي•œ ى‘ى—…ى„ يپ¬ê²Œ ى‚ê°گ ê°€ëٹ¥ي•ک게
ëگ©ë‹ˆë‹¤.
VRê³¼ êµگي†µ ي•´ى„ى„ ى–‘ë°©ي–¥ىœ¼ë،œ ى—°ê³„ي•کى—¬, ê°„يژ¸ي•¨ê³¼ ى²¨ë‹¨ 기ىˆ ىک ى،°ي•©ى´ ëڈ„ë،œى™€ êµگي†µىک ê°œى„ ى—گ 기ىکپي• 것ى´ë¼ê³ 기대ي•کê³
ىˆىٹµë‹ˆë‹¤.
â– ëچ°ى´ي„° ë³€ي™ک 기ëٹ¥
م€€êµگي†µ ي•´ى„ê³¼ VRى—گى„œ ى·¨ê¸‰ي•کëٹ” ëڈ„ë،œ ى •ë³´ىک ى°¨ى´ê°€ ى،´ى¬ي•ک기 때문ى—گ, ë³€ي™ک ى²ک리가 ي•„ىڑ”ي•©ë‹ˆë‹¤. S-PARAMICSى¸، 마ى´يپ¬ë،œ ى‹œë®¬ë ˆى´ى…کى—گى„œëڈ„
êµگي†µ ي•´ى„ى—گ ي•„ىڑ”ي•œ ëڈ„ë،œ ى •ë³´ëٹ” ى‹¤ى œ يک•ىƒپ ى •ë³´ىک ى „부가 ى•„닙니다. ê·¸ë ‡ê¸° 때문ى—گ UC-win/Roadى—گ S-PARAMICSىک
ëچ°ى´ي„°ë¥¼ ى½ى–´ë“¤ى¸ي›„, ëڈ„ë،œ يک•ىƒپى—گ ê´€ي•œ ىƒپى„¸ ى„¤ى •ى„ ي•کëٹ” يژ¸ى´ يک„ى‹¤ى پىœ¼ë،œ ëگ©ë‹ˆë‹¤. ë°ک대ë،œ S-PARAMICSى—گى„œ UC-win/Roadىک
ëچ°ى´ي„°ë¥¼ ى½ى–´ë“¤ى¸ي›„, ى ‘ى†چى گ ê·¸ë¦¬ê³ êµگي†µى—گ ê´€ي•œ ىƒپى„¸ ى„¤ى •ى´ ي•„ىڑ”ي•ک게 ëگ©ë‹ˆë‹¤. 본 ي”Œëں¬ê·¸ى¸ى—گى„œëٹ” ى‘ى—…ëں‰ى„ ى¤„ى´ê¸° ىœ„ي•´ى„œ ê°€ëٹ¥ي•œ
ë²”ىœ„ë‚´ى—گى„œ ى •ë³´ë¥¼ êµگي™کي•©ë‹ˆë‹¤. êµگي™کىک ىƒپى„¸ëٹ” ى•„ëکى™€ ê°™ىٹµë‹ˆë‹¤.
| S-PARAMICS يŒŒى¼ |
UC-win/Road ىک¤ë¸Œى يٹ¸ |
Nodes:ë§پيپ¬ 단부ىک ىœ„ى¹ک(3D)
ى ‘ى†چى گىœ¼ë،œىچ¨ىک ى •ë³´
ىک¨ë¨ي”„ ى •ë³´ |
ëڈ„ë،œ+êµگى°¨ى گï¼ڑëڈ„ë،œ ى„ يک• ىœ„ى¹ک ى •ë³´, ى¢…단 ى„ يک•ى—گ ى‚¬ىڑ©
êµگى°¨ى گ ى„¤ى •, 단면 ë³€ي™”
ىک¨ë¨ي”„ ىƒى„± |
Links+Centres:ëڈ„ë،œ ى„ يک•ï¼ڑى§پى„ , ى›گيک¸
ىٹ¬ë¦½ ë¨ي”„ ى •ë³´ |
ى„ يک•ï¼ڑëڈ„ë،œ يڈ‰ë©´ ى„ يک•ï¼ڑى§پى„ , ى›گيک¸ë¥¼ 그대ë،œ ى„يڈ¬يٹ¸
ىک¤ي”„ë¨ي”„ ىƒى„± |
Categories:يڑ،단면 ى†چى„±ï¼ڑى°¨ى„ ىˆک,
ى°¨ى„ يڈ, ى¢…ë¥ک(Urban/Highway) |
يڑ،단면ï¼ڑيڑ،단면 يک•ىƒپï¼ڑى°¨ى„ ىˆک, ى°¨ى„ يڈ, ي…چىٹ¤ى²کىک ي• 당
+ى´ˆê¸° ى„±ي† مƒ»ى ˆي† , ë³´ëڈ„등ىک ى„¤ى • |
 |
|
 |
S-PARAMICSë،œë¶€ي„° ë،œي„°ë¦¬ë¥¼ ى„يڈ¬يٹ¸ ي•œ ê²°ê³¼ى…니다.
ë،œي„°ë¦¬ ى†چى„±ى„ ê°€ى§€ê³ ىˆëٹ” Node를 UC-win/Roadë،œ ي‘œيک„ي•©ë‹ˆë‹¤. ëکگي•œ,
ىڑ°ى¸، يڑ،단면ىک ë³€ي™”를 ي‘œيک„ي•کê³ ىˆىٹµë‹ˆë‹¤. |
 |
|
 |
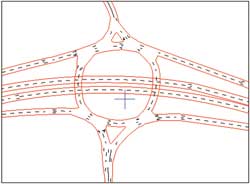
ë³µىˆکىک êµگى°¨ى گىœ¼ë،œ 구ى„±ëگکى–´ ىˆëٹ” 대يک• ë،œي„°ë¦¬ىک ى„يڈ¬يٹ¸ ê²°ê³¼ى…니다.
S-PARAMICSى—گى„œëٹ” ë،œي„°ë¦¬ë¥¼ ë³µىˆکىک ى ‘ى†چىœ¼ë،œ ى„¤ى •ي•کëٹ” 것ى´ ë§ژىœ¼ë©°,
UC-win/Roadى—گى„œëٹ” ى—°ى†چëگœ êµگى°¨ى گىœ¼ë،œ ي‘œيک„ي•©ë‹ˆë‹¤.
ëکگي•œ, 기ى´ˆ ëچ°ى´ي„°ى—گ 높ى´ ى •ë³´ë¥¼ ê°€ى§€ê²Œ ي•¨ىœ¼ë،œىچ¨, UC-win/Roadى—گى„œ ى¢…단
ى„ يک•ىک ى„¤ى •ى´ ê°€ëٹ¥ي•ک게 ëگکى—ˆىٹµë‹ˆë‹¤.
ë،œي„°ë¦¬ىک ى•„ëک를 ى§€ë‚کëٹ” ëڈ„ë،œë¥¼ ىگëڈ™ى پىœ¼ë،œ ي„°ë„گ 공간ىœ¼ë،œ ى„¤ى •ي•©ë‹ˆë‹¤.
|
â– ىœ ى € ى¸ي„°يژکى´ىٹ¤
م€€ى•Œê¸° ى‰¬ىڑ´ يک•يƒœë،œ ى„يڈ¬يٹ¸ ي•کë ¤ê³ ي•کëٹ” ëچ°ى´ي„°ë¥¼ 간단يˆ ي™•ى¸ي• ىˆک ىˆىٹµë‹ˆë‹¤. ëکگي•œ, ى„يڈ¬يٹ¸ ى²ک리ىک يŒŒë¼ë¯¸ي„°, يڑ،단면ىک ي…چىٹ¤ى²ک를
ى„¤ى •ي•کëٹ” 것ى´ ê°€ëٹ¥ي•©ë‹ˆë‹¤.
â– ىƒکي”Œ
م€€ى œ9يڑŒ 3D VRى‹œë®¬ë ˆى´ى…ک ى½کي…Œىٹ¤يٹ¸ ëچ°ى´ي„°, [US 41ي”„ë،œى يٹ¸ ë،œي„°ë¦¬ ë””ىگى¸ى—گ ىˆى–´ى„œىک VRëچ°ى´ي„°, Ourston Roundabout Engineering, Inc.(USA)]ى„ S-PARAMICSëچ°ى´ي„°ë،œ ë³€ي™کي•œ ê²°ê³¼ى…니다.
|