| New Products |
|
| UC-win/Road UAVプラグイン Ver.3 |
シミュレーション |
| 3DVRとの連携によりUAVの飛行計画作成、遠隔操作、ログ取得 |
| UAVプラグイン体験セミナー |
●日時:2017年9月8日(金) 9:30〜16:30
●会場:午前:東京本社 セミナールーム
午後:SEKIDO DJI ドローンフィールド
●参加費:無償 |
|
●新規価格
●リリース |
300,000円
2017年 10月 |
|
|
Ver.2.1では、マッピングのためのミッション作成がより簡単になっています。ミッション編集画面に新規タブを追加し、ミッションの予想結果をもとに複数のパラメータに基づいてマッピングミッションを作成することができるようになりました。
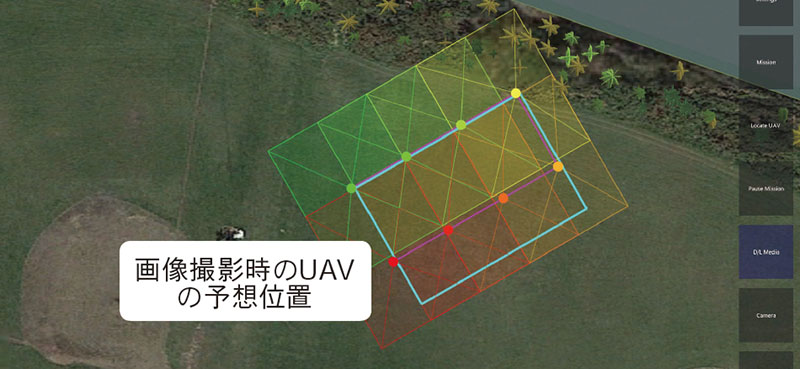
マッピングの位置と範囲、オーバーラップ係数とピクセル解像度などのパラメータが設定可能で、撮影範囲や予想される飛行経路をミッションのプレビューで確認することができます(図1)。
プレビュー確認後に「実行」ボタンをクリックすると飛行が開始されます。UAVは自動的に離陸して定義した経路に沿って飛行し、写真を撮影。最後の写真撮影地点か、または離陸地点に戻ってから、自動的に着陸します。
着陸後、マッピングミッションのプレビューは、飛行ミッション中に撮影された写真のサムネイルが実際の位置に表示されて完了します (図 2)。これでマッピングミッションの結果をプレビューが行え、写真をフル解像度でダウンロードする前に正しく撮影されているか確認することができます。
 |
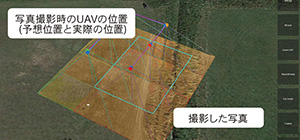 |
| ▲図1 マッピングミッションのプレビュー画面 |
▲図2 完成したマッピングミッションのプレビュー |
|
本バージョンでは、さらに扱いやすいシステムになるよう改善を図っています。地面が平らではない場合や周囲に建物や木などの障害物がある場合への対応にフォーカスした開発を進めており、新機能としては以下の項目を予定しています。
- 飛行ミッションの標準書式(KML)へのインポート/エクスポート。
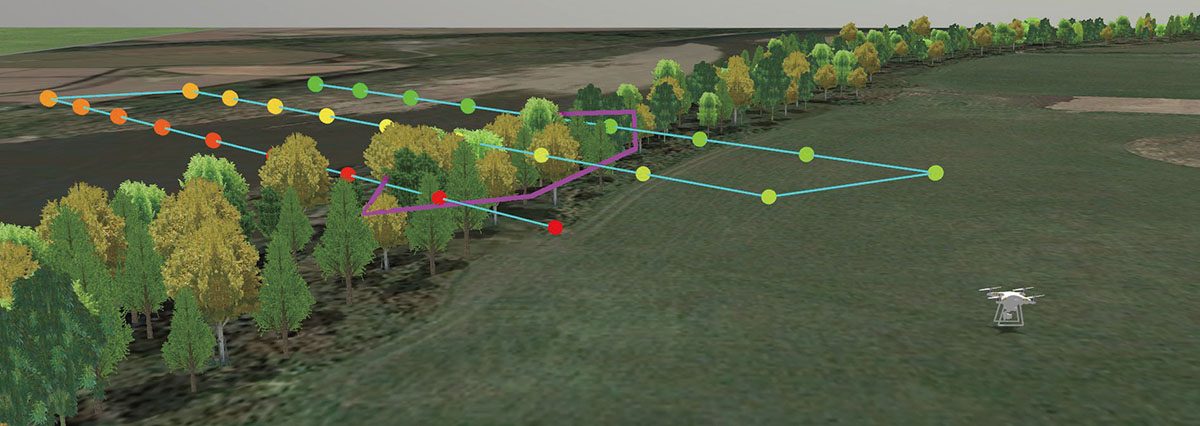
- 地面の標高または障害物に応じた各通過点の高度の自動調節(図3)。これにより地形に関係なく同じ高度からの写真撮影が可能となる。
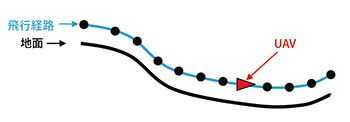 |
| ▲図3 地形に応じた高度の自動調節 |
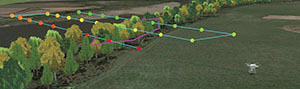
- 選択した通過点すべてに対しての一括変更適用。例えば、通過点を複数選択し、それらすべての標高値をまとめて増加させるなどといった操作が可能となる(図4)。
 |
 |
| ▲図4 複数の通過点に一括で変更を適用 |
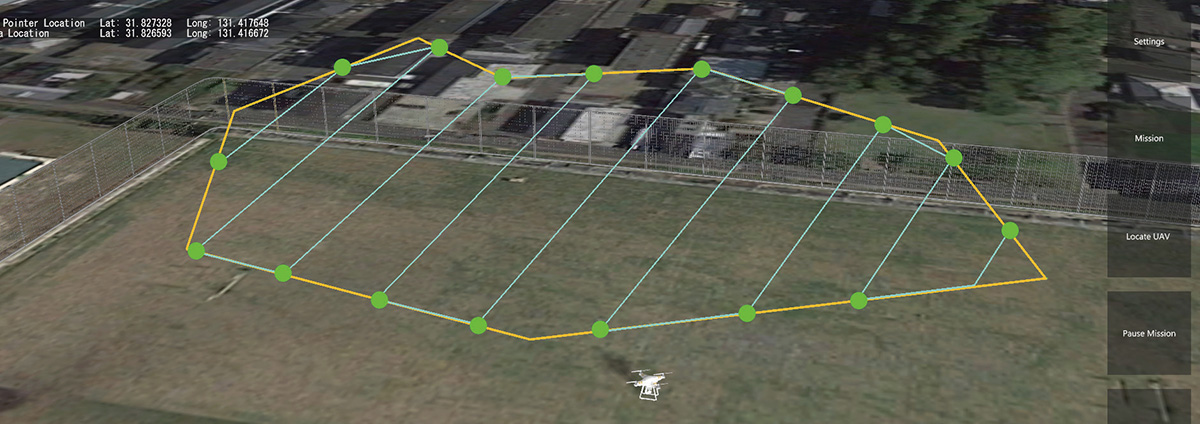
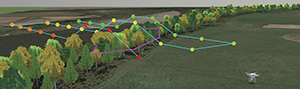
- 現行バージョンではマウスクリックで長方形の定義を行っているが、マッピングエリアの範囲の定義が、ポリゴンを使用した方法で可能となる(図5)。
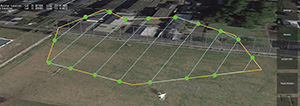 |
| ▲図5 ポリゴンによるマッピングエリアの範囲定義 |
さらに、現在DJI Phantom 4 Pro(図6)とDJI Mavic Pro (折りたたみ可能なコンパクトUAV:図7)への対応に取り組んでいます。前回対応済みのハードウェア(DJI
Phantom3 Advanced、DJI Phantom 3 Professional)と異なり、今回のものは距離センサーが搭載されており、衝突を検知して回避できます。UAVを物体の至近距離まで操縦して詳細を捉えることができるため、インフラ点検等に役立つことが期待されます。
 |
|
 |
| ▲図6 DJI Phantom 4 Pro |
|
▲図7 DJI Mavic Pro |
|
| (Up&Coming '17 盛夏号掲載) |
 |
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|