道路项目和公共事业中支援达成共识的三维实时VR软件
International
Version(对应日、英、中、韩、意)
UC-win/Road Ver.17
初版发布:2000.05.09/最新Ver.发布:2022.06.03
- Ultimate
- 113,000 元
- Driving Sim
- 72,000 元
- Advanced
- 58,000 元
- Standard
- 39,000 元
- CIM Lite
- 31,000 元
- Multi User Client Version
- 7,000 元
- Presentation Version
- 3,000 元
- Cluster Client Version
- 3,000 元
- Free Viewer Version
- 免费
程序概要 >> Ver.17 新功能详情 NEW!
三维实时虚拟现实软件UC-win/Road
于2002年获得日本经济产业部后援的软件产品年度大奖,通过简单的PC操作可完成各种项目的三维大规模空间制作。
作为一款可进行多种多样实时演示的先进软件,其灵活的开发环境适用于高端系统开发。
-
标准数据/CAD数据的应用
-
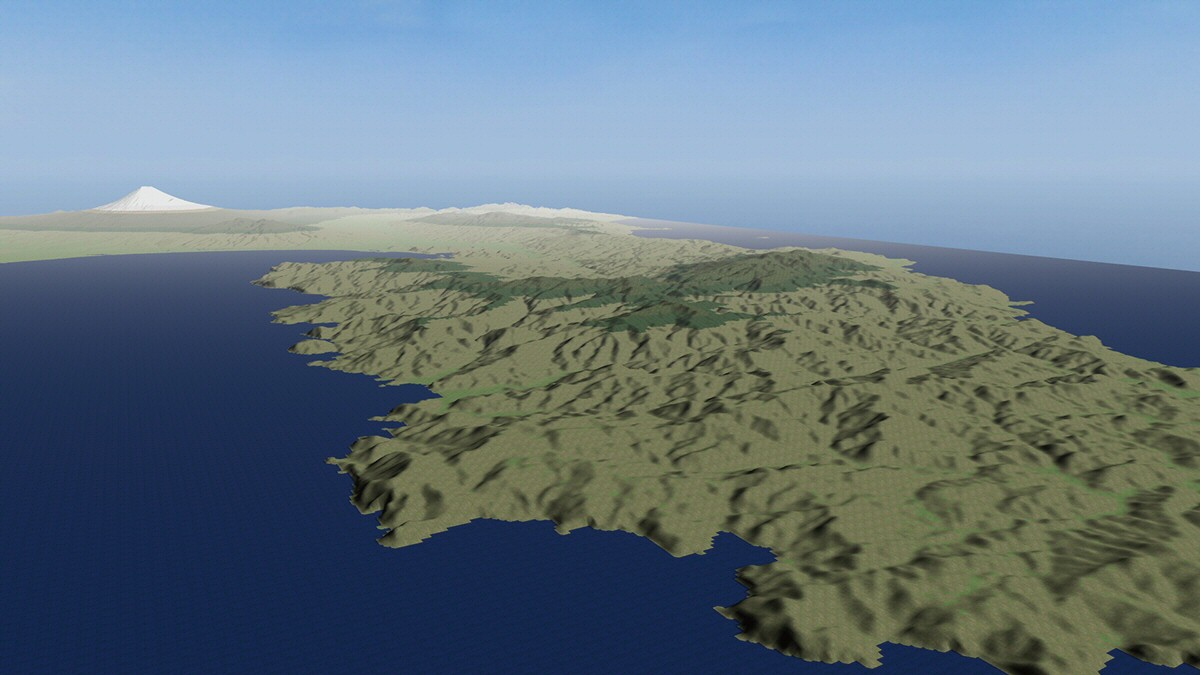
- 搭载新西兰的50m网格标高地形
- 搭载全球[CGIAR-CSI SRTM 90m Database]中国和澳大利亚地形
- 对应SRTM(90m网格)、ASTER(30m网格)
- BlueMarbleNextGeneration(500m网格)(对应海底地形)
- 世界测地变换工具认证:(国地企调发第603号)
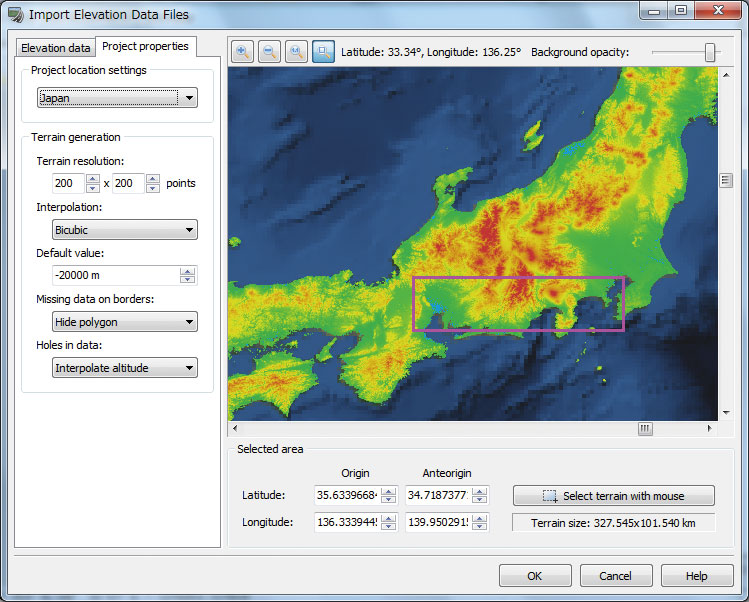
- 支持生成指定分辨率的高精度地形
-
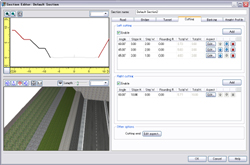
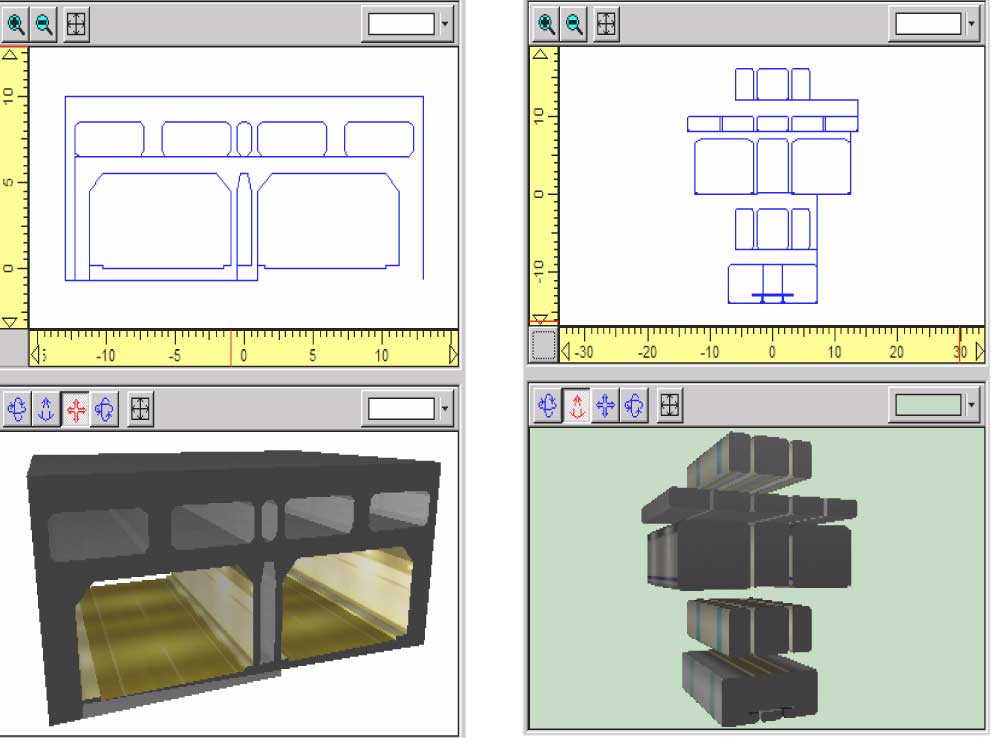
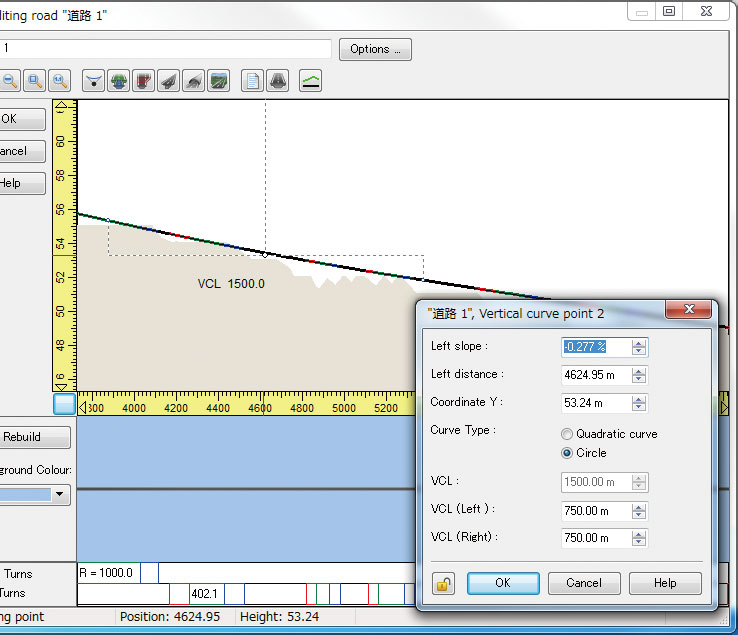
简单精致地完成复杂的道路构造
-
通过输入线型参数可以自动生成道路、隧道、桥梁、河流、步行路径。
通过定义道路平面线型(对应缓和曲线、单曲线)、纵断线型,可以设置隧道、桥梁区间。断面定义还可处理体现落石台在内的填挖方边坡。可以通过线型、断面功能简单地作成复杂的道路构造。




交通流的内部生成
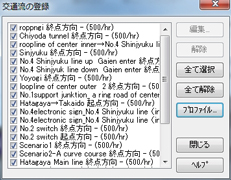
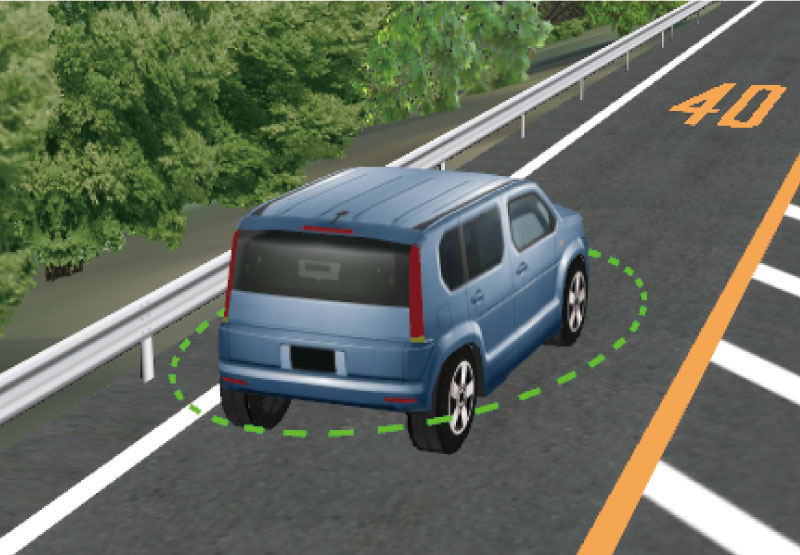
支持设置Traffic Generators(生成交通)/Flow(交通流)车辆种类占比、交通量并生成交通流,以及控制指定车辆进行交互式交通模拟。


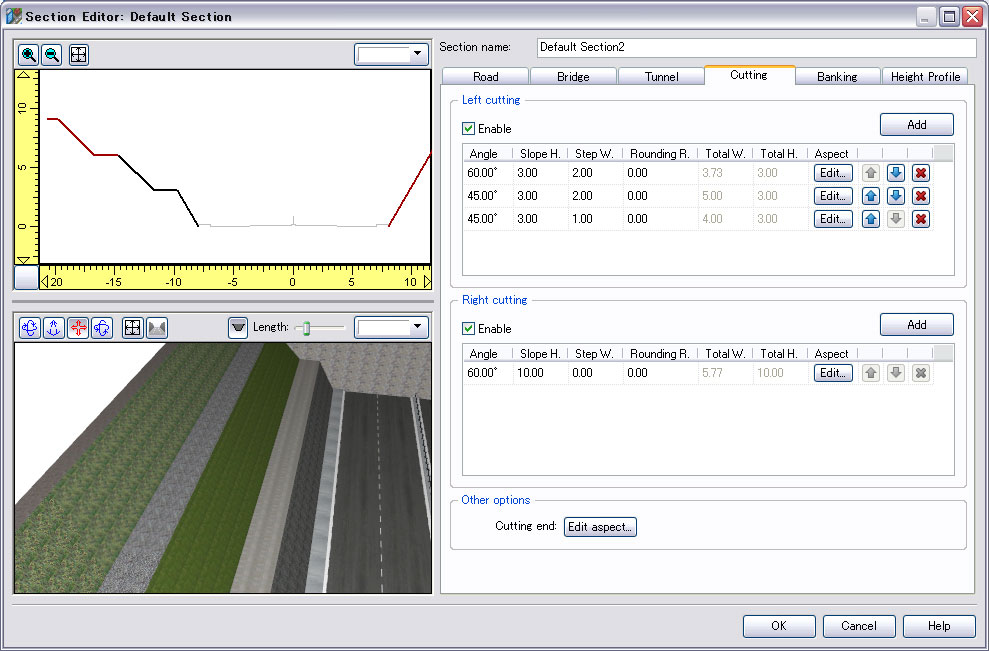
填方、挖方、边坡、台阶的圆滑处理
支持同时设置左右方填挖方边坡的宽度、角度和材质,并且支持台阶的圆滑处理。

-
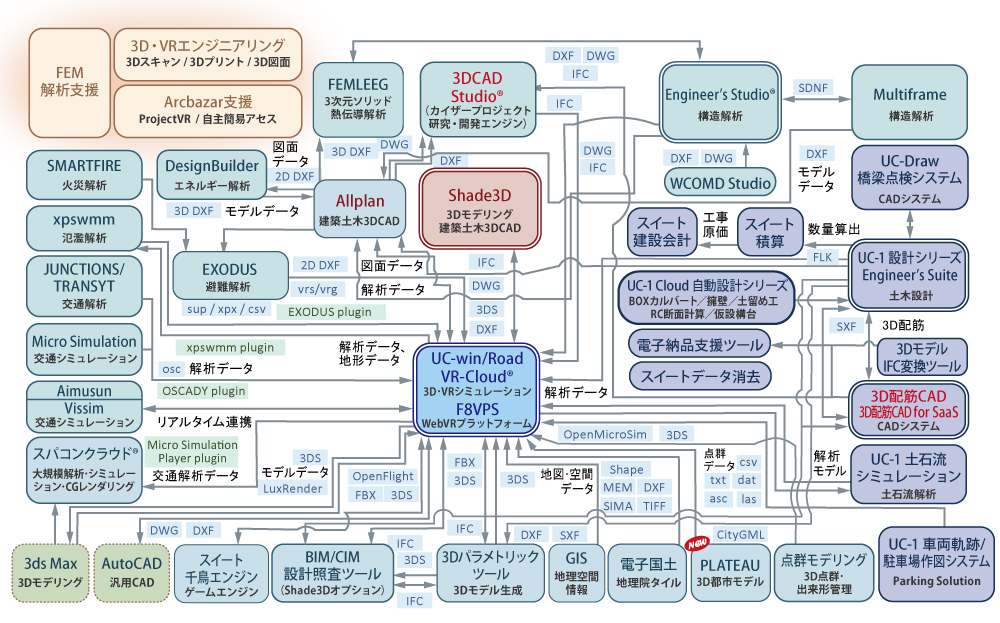
各种数据连接
-
对应IFC・Shape・LandXML・DWG等格式数据,通过连接各种数据使其三维工程应用平台的功能无线延申。
●IFC的数据连接
●道路CAD的数据连接
・UC-win/Road for Civil 3D
・UC-win/Road 数据转换插件 for APS-Win
・UC-win/Road for 12d Model
・UC-win/Road OHPASS插件选项
●UC-1设计系列的数据连接
・3D配筋模拟
・3D配筋CAD for SaaS
・3DCAD Studio®
●交通AP的数据连接
・OSCADY PRO ・TRANSYT
・Aimsun ・VISSIM
・S-PARAMICS ・TRACKS
・SIDRA
●分析结果的数据连接
・UC-win/Road for EXODUS
・UC-win/Road for xpswmm
●GIS的数据连接
・UC-win/Road for GIS
●3DCAD数据的连接
・Shade3D
・Allplan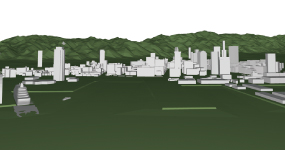
▲UC-win/Road→IFC

▲DWG输出结果

▲UC-win/Road

-
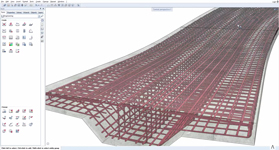
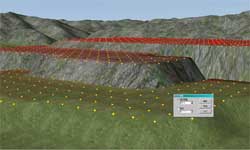
大规模空间的实时渲染
-
对应64位系统,小至1厘米的骰子,大到数百公里的道路构造,均可在同一空间内完成。
可平滑处理广阔的地形和高清模型,并且LOD功能还支持动态显示。


通过Visual Options Tool 进行各种显示。并可进行道路障碍的交通模拟。
可实时地控制时间、天气、灯光等。通过人造灯光功能还可进行昼夜间和影子投影的表现。对基于交通量、车辆分布属性、信号设置的交通流生成、灾害、事故所导致的道路通行障碍也可进行模拟。










通过简单的PC操作实现自由实时的VR。丰富的功能可以支援产品演示的各种需求。
各种驾驶模拟
支持各种驾驶模式(车速、车线变更、视点高度、8方向的视点切换)、视点的移动(他车视点、视点上下、转向)。支持移动路线、飞行路线的设置(支持在3D画面中编辑)。支持使用3D驾驶舱和多屏显示器以进行更高级的驾驶模拟。
Before/After的场景切换
设计前和设计后的对比,最多支持设置20种场景并切换显示不同的模型、标志、树木等设计效果。


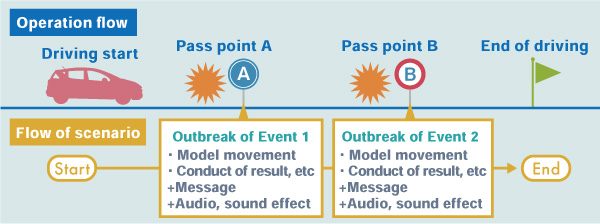
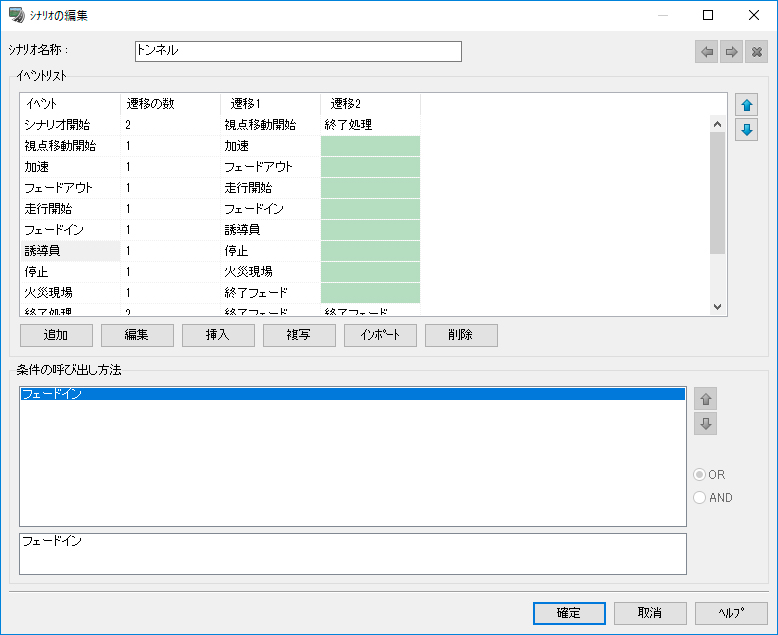
场景
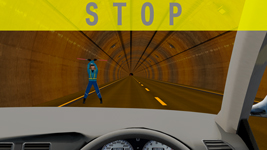
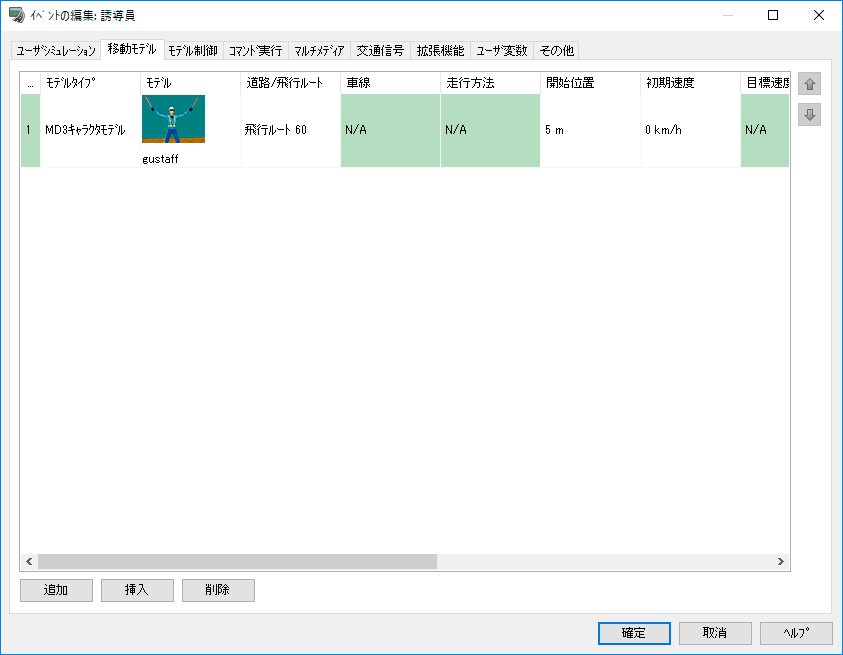
在模型中设置各种指定的动作。通过在场景中设置现实中可能发生的事件和想要测试的条件,可以有效地实现创建VR场景的初衷。



简单且详细的设置方式
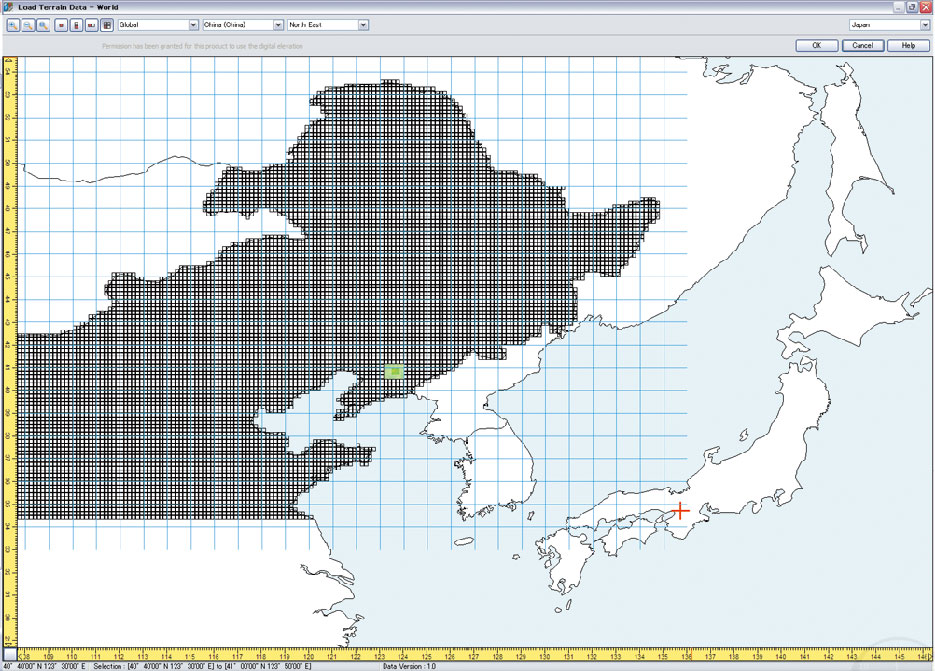
●搭载标准地形、地图数据库
●支持任意地形、世界测地系的转换
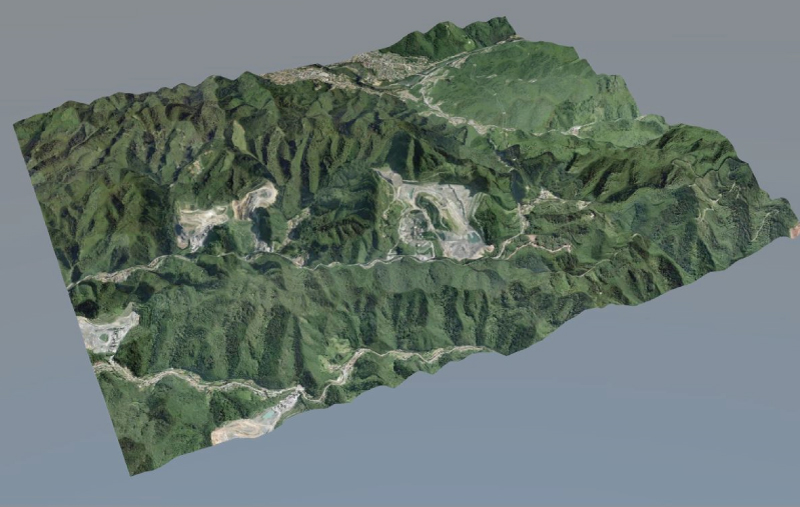
●支持航空图片的粘贴、DXF-XML转换、3D、2D地形的编辑功能
●支持Shape、IFC、DWG等CAD和3D/2D间的数据转换
日本国土地理院地图
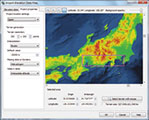
搭载日本国土地理院地图:50m网格标高(全日本)/2500空间基盘(东京/大阪)日本国土地理院认可(2000年总使、第173号)、同时支持5m/10m网格
对应全球地形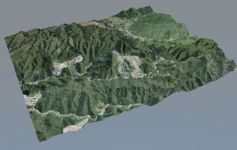
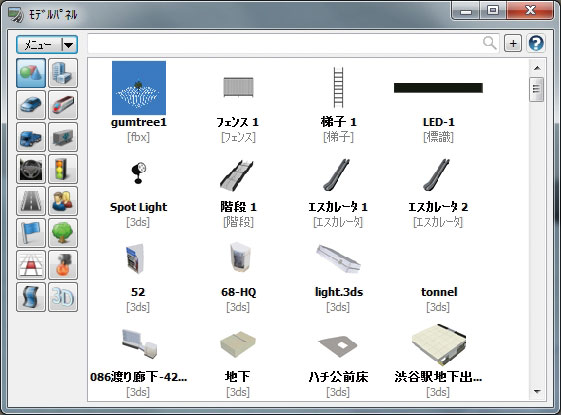
通过标准模型/材质等丰富的下载数据库,有效地支援VR数据制作
除3D模型·材质等标准数据外,可直接利用互联网的UC-win/RoadDB下载丰富的素材。同时还准备了方便的编辑·移动工具,可对模型进行缩放、移动、旋转、倾斜和配置。通过动作设置可动模型,还可控制模型的动作。此外还支持创建可以输入参数的标牌、楼梯、自动扶梯和围栏。




















TOPICS/相关信息
-
UC-win/Road TOPICS
-
- TOPICS
- UC-win/Road
Ver.12取得PSQ认证
~确保系统开发基础架构的高度可靠性,扩大对政府系统开发项目的需求~ (2017/07/07)

● 第8届 CSAJ 联盟大奖 特別奖获奖! 荣获经济产业大臣奖!
~通过UC-win/Road对开放数据的连接加速各种技术和领域之间的连接~● 第8届 CSAJ 联盟大奖 特別奖获奖! >获奖产品:UC-win/Road for SaaS(现VR-Cloud®)
社团法人 计算机软件协会主办。 http://www.csaj.jp/
提携实绩、预定、商谈件数及将来性・市场性・技术性等综合评价后授予的奖项。● 建设技术展近幾2003[注目技术奖]获奖! 
● Software·Product·of·The·Year 2002获奖! [生活/生活领域]
(财)软件信息中心(SOFTIC)http://www.softic.or.jp实施的优良软件·产品
(2002年共4个领域)表彰制度。UC-win/Road Ver.14合格通过OCF鉴定的[LandXML格式3维设计数据对应鉴定]
UC-win/Road Ver.14合格通过OCF鉴定的[LandXML格式3维设计数据对应鉴定]。
(OCF:OPEN CAD格式评议会http://www.ocf.or.jp/)

UC-win/Road Ver.12取得PSQ认证
FORUM8于2017年 6月 28日,UC-win/Road Ver.12 取得基于PSQ标准的认证。
最新信息
-
相关信息
-
- ◆最新信息
- VR Design Studio UC-win/Road Ver.15发布('20.02.01)
- VR Design Studio UC-win/Road Ver.14发布('19.11.05)
- UC-win/Road Ver.12取得PSQ认证('17.07.07)
- ◆相关产品
- UC-win/Road支援系统
- 3D・VR数据制作服务
- ◆视频库/竞赛
- UC-win/Road的运用案例视频库
- CPWC学生竞赛视频/VDWC学生竞赛视频
相关信息
UC-win/Road Ver.17 新功能
- 新闻稿UC-win/Road Ver.17 发布~增强开放资料利用与模拟环境建置支援功能~
(2023/07/12)NEW! - 新产品介绍 UC-win/Road Ver.17(Up&Coming ’23 春季刊)NEW!
- 对应VISSIM 2023 连携。
- VISSIM TCP 连携功能
即使 UC-win/Road 和 VISSIM 安装在不同的 PC 上,也可实现连接。 - 对应VISSIM多用户
当建立群组连接并执行 VISSIM 连接时,多用户客户端操作的车辆也会被发送到 VISSIM。 - 撤销和重做功能
现在最多可以撤销 10 个操作。 此外,还支持重做功能,可以恢复以前无法进行的编辑操作。 - 道路线性的保存・读取功能
在平面编辑界面上,现在可以使用道路线的导出/导入和复制/粘贴功能。 由于道路横截面和路面纹理会与路线一起保存,因此可以精确再现道路轮廓和材料。 - 道路的起点・终点变更功能
【关联信息】
●CityGML数据导出功能
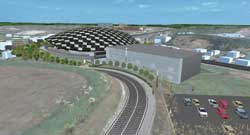
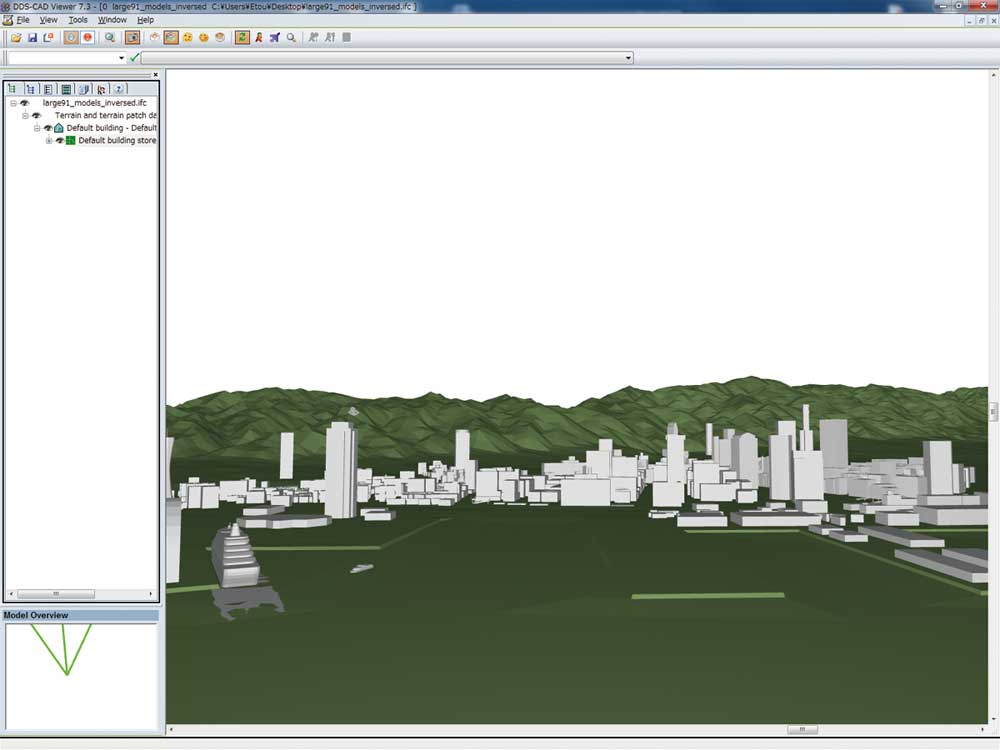
以UC-win/Road为平台,可制作、编辑城市模型,并从UC-win/Road输出城市模型。包括LOD1-2建筑模型和LOD1级别的道路、地形模型。当从PLATEAU读入CityGML时,CityGML数据可以连同其包含的信息一起重新导出,除已更改的区域外,尽可能再现原始信息。
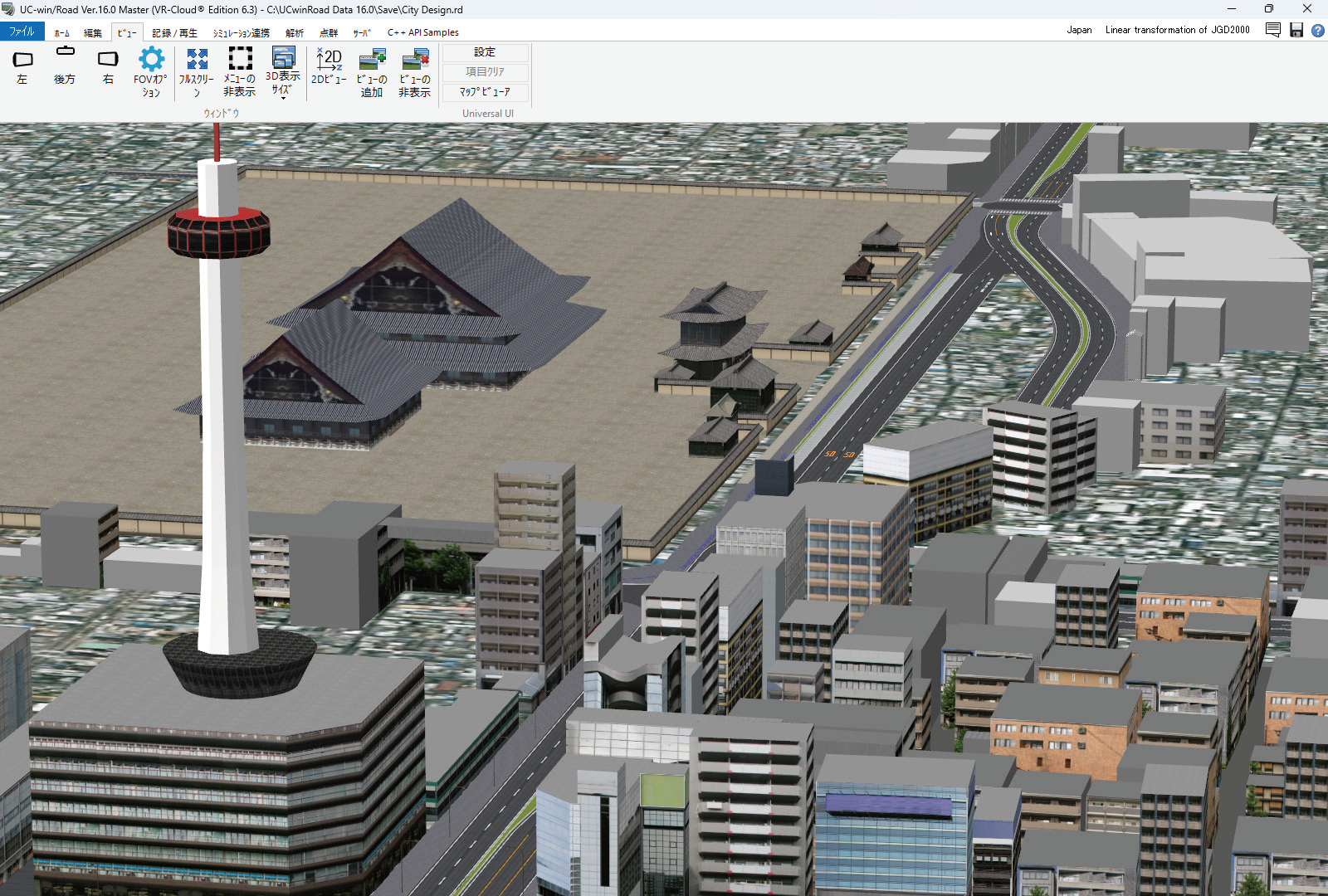
UC-win/Road的都市模型数据
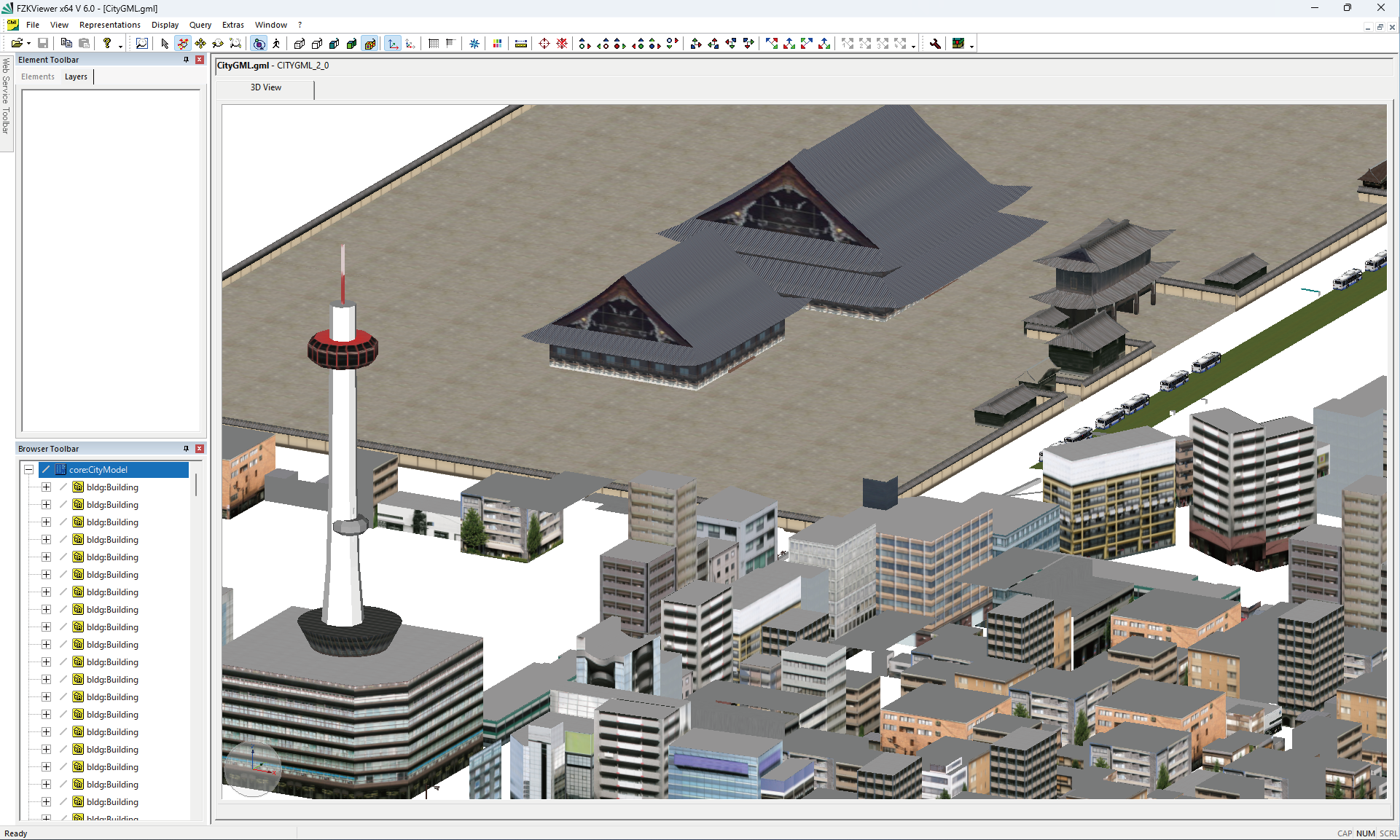
在查看器中显示UC-win/Road输出的CityGML示例。
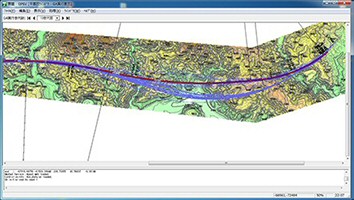
●支持洪水导航数据的导入
海啸插件海啸插件从国土交通省的洪水导航下载洪水数据,利用洪水导航的数据在UC-win/Road上进行洪水可视化模拟。利用海啸插件功能,可确认水位随时间的变化,并通过梯度可视化表现出真实的水面。
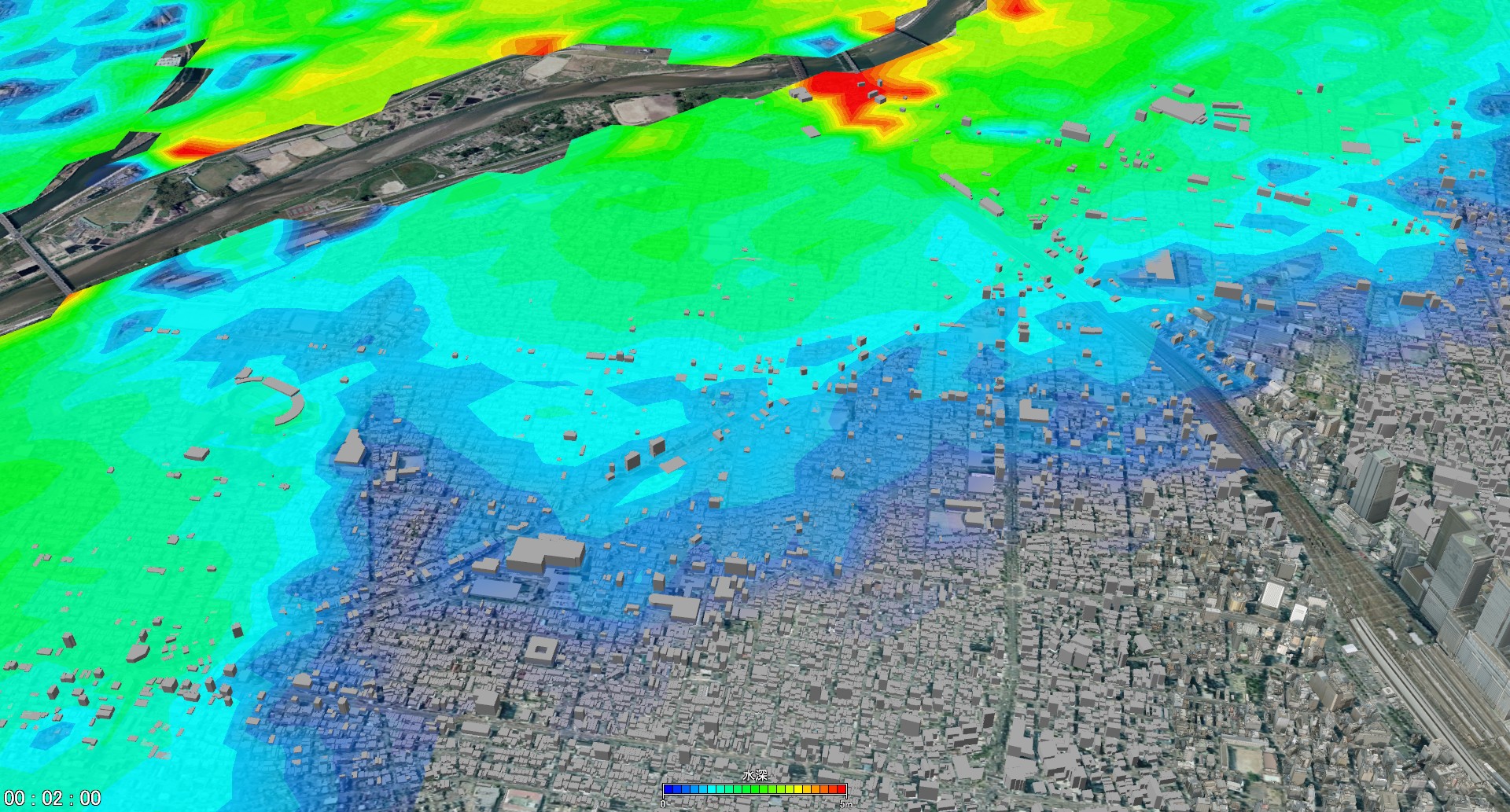
使用UC-win/Road加载洪水导航数据的模拟示例。
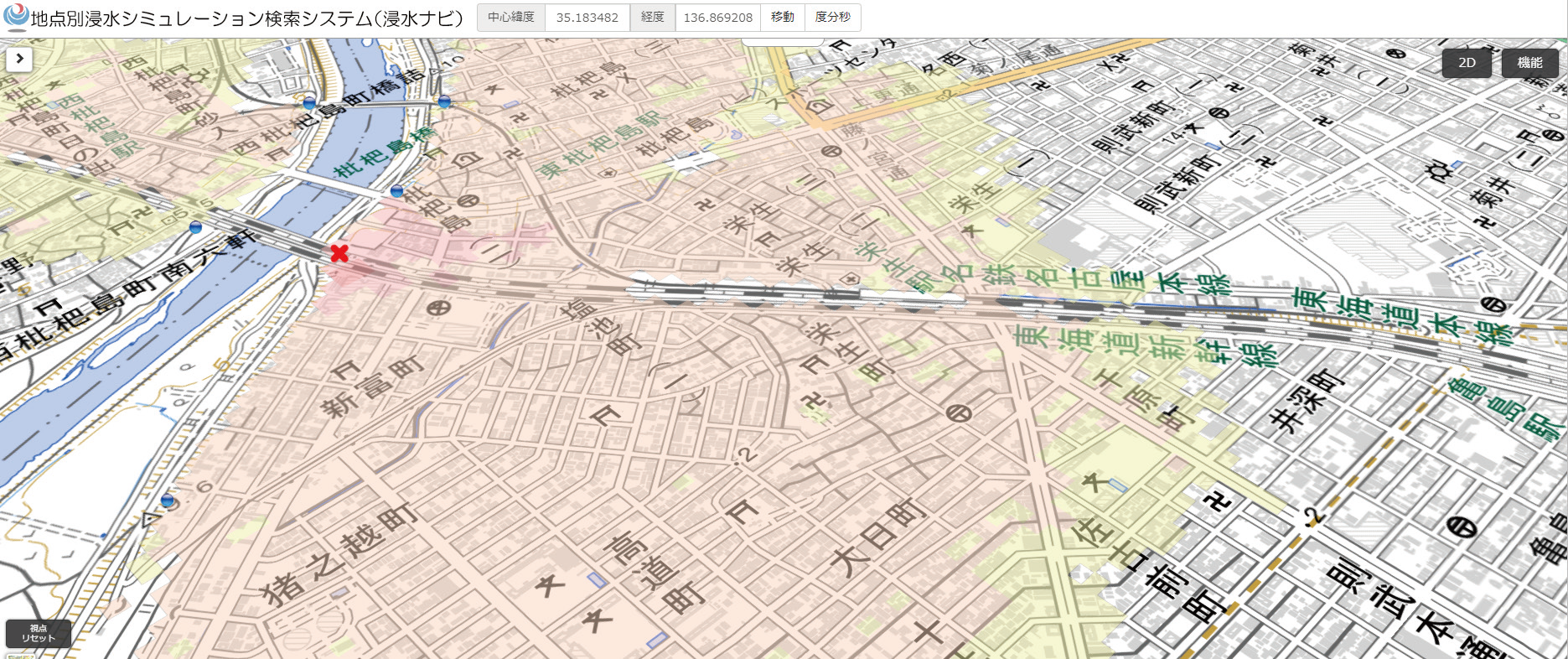
国土交通省 在洪水导航系统中显示动画。
●VISSIM连携


▲在 VR 中加载 VISSIM 的车辆和行人流分析案例研究(第 21 届 3D/VR 模拟竞赛获奖者)。
「本厚木站地区交通再现的 VR 模拟。」株式会社东方咨询)
●对应Python 接口(COM API)
Python API是通过COM访问UC-win/Road主要功能的API。 它提供了对驾驶模拟器控制、模型/角色实时控制、主屏幕视角控制、功能区菜单项和按钮等功能的访问。
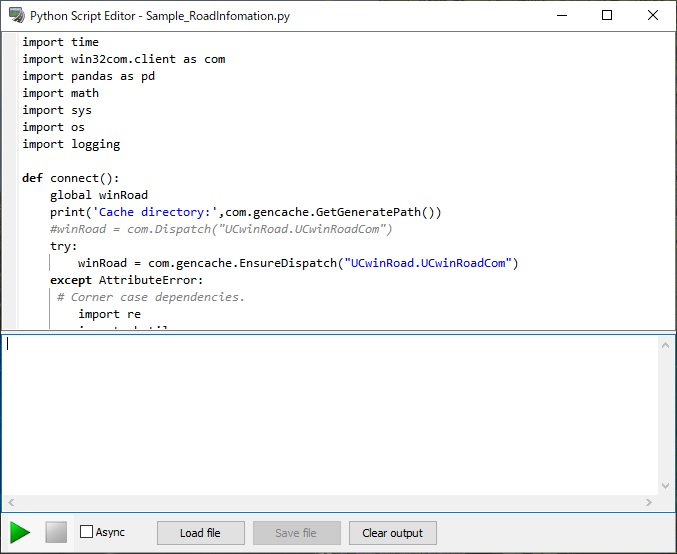
脚本编辑画面
●道路编辑功能的改善
还增加了其他功能,使道路建模更加高效。
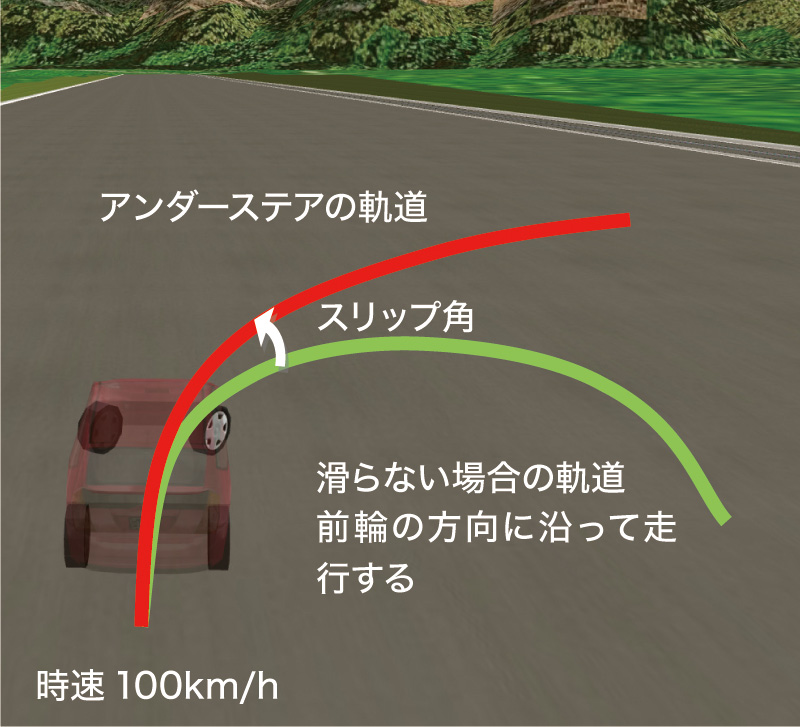
●LKA功能
现在支持表示车道偏离预防系统运动的功能。 系统会计算车道偏离量,并根据偏离量和速度,计算施加在方向盘上的力和转向修正量。 方向盘上的反作用力会反映在支持力反馈的游戏控制器和支持扭矩控制的各种驾驶模拟器硬件上。 此外,还可以在车辆偏离车道时播放设定的警告声。 如果该功能与外部系统连接,就可以实时获取该功能的计算结果。 这可用于研究和开发与 LKA 功能相关的人机界面和道路安全。

LKA机能
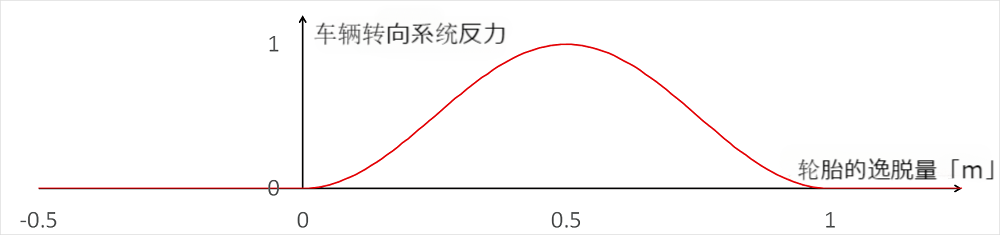
LKA动作参数调整
程序的功能和特点
-
计划/设计
-
- 搭载新西兰的50m网格标高。
- 获得了全球[CGIAR-CSI SRTM 90m
Database]的使用许可
搭载了中国与澳大利亚地形数据。 - SRTM(90m网格)、ASTER(30m网格)
- BlueMarbleNextGeneration (500m网格)(也对应海底地形)
- 指定分辨率生成高精细地形
- 对应超过110km的大规模地形生成
- 导入(三维、二维):道路断面、模型
- 导出:分类(模型、线形、地形等)、整体
●国土地理院数值地图
50m网格(标高)(承认号码:平12总使、第173号)标准搭载。 5m网格(标高)对应
●对应全球地形
▲对应海底地形
●线性参数提取功能
根据GPS等获得的点序列自动计算道路的IP点曲线参数。

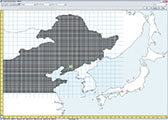
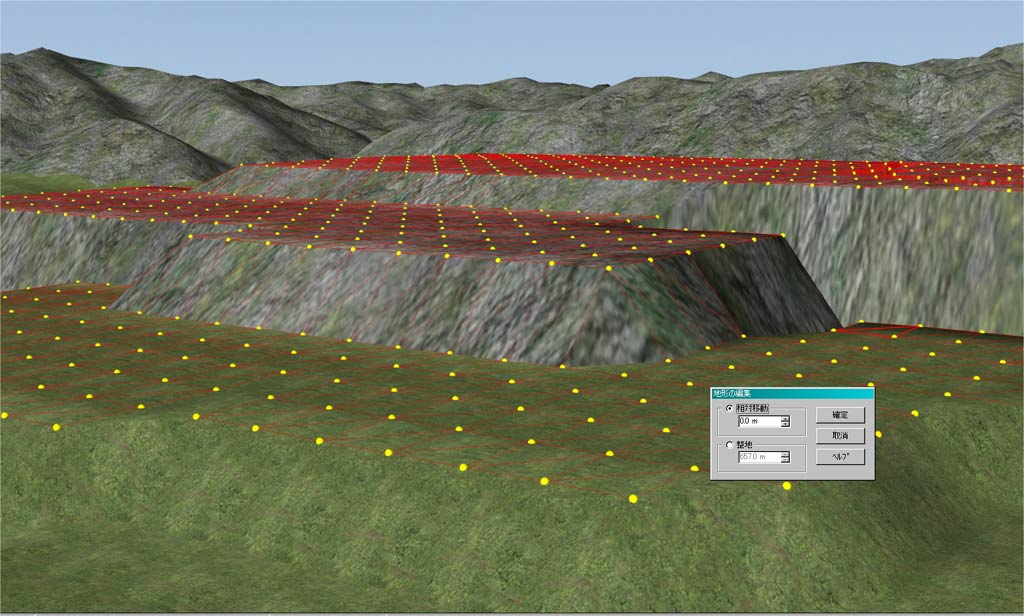
●地形整地/批量处理
对应地形的上升下降、整平。通过道路生成的填挖方土的处理、对应地形吻合处理。
▲地形命令整地处理

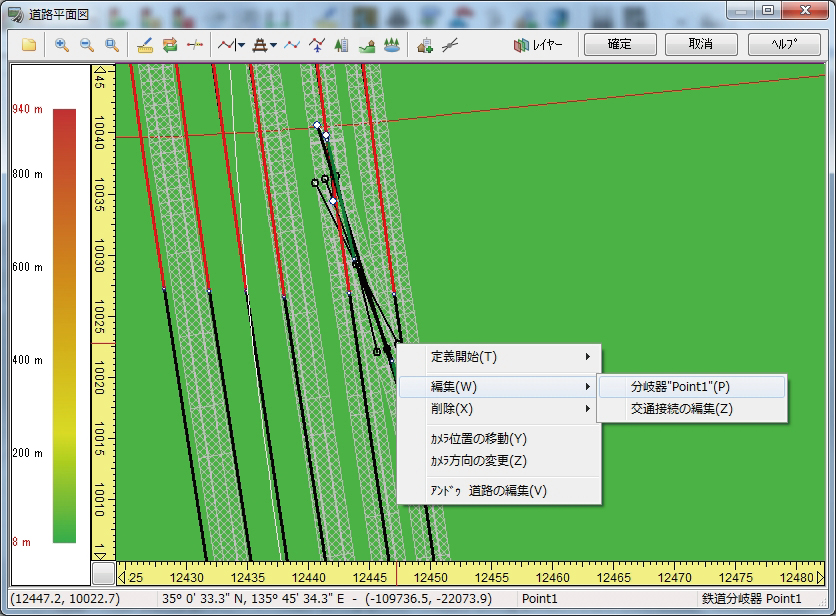
●铁道线形
支持测量中心线、结构物中心线、缓和曲线、纵断曲线、衰德、分歧器等描绘。讨应横跨多条接续轨道的直通行驶。
缓和曲线:克罗梭、三次拋物线、正弦半波长度曲线
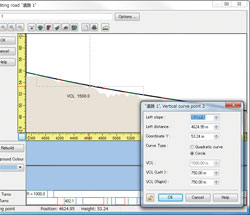
纵断曲线:二次拋物线、圆曲线

●河流、道路断面
对应河流的平面和纵断面线形设置。

●横截面透过
断面编辑中可对各组成部分指定透过率。透光板等透明、半透明消音壁、高栏等等表现也可快速制作。

●填挖方更新和小段圆滑功能
可以设置挖方/填方方式,可自由设置各段左右的小段幅度、法面角度、使用材质。设置在各标签中进行。另外、通过输入行的编辑按钮可设定各段的斜面、小段材质。
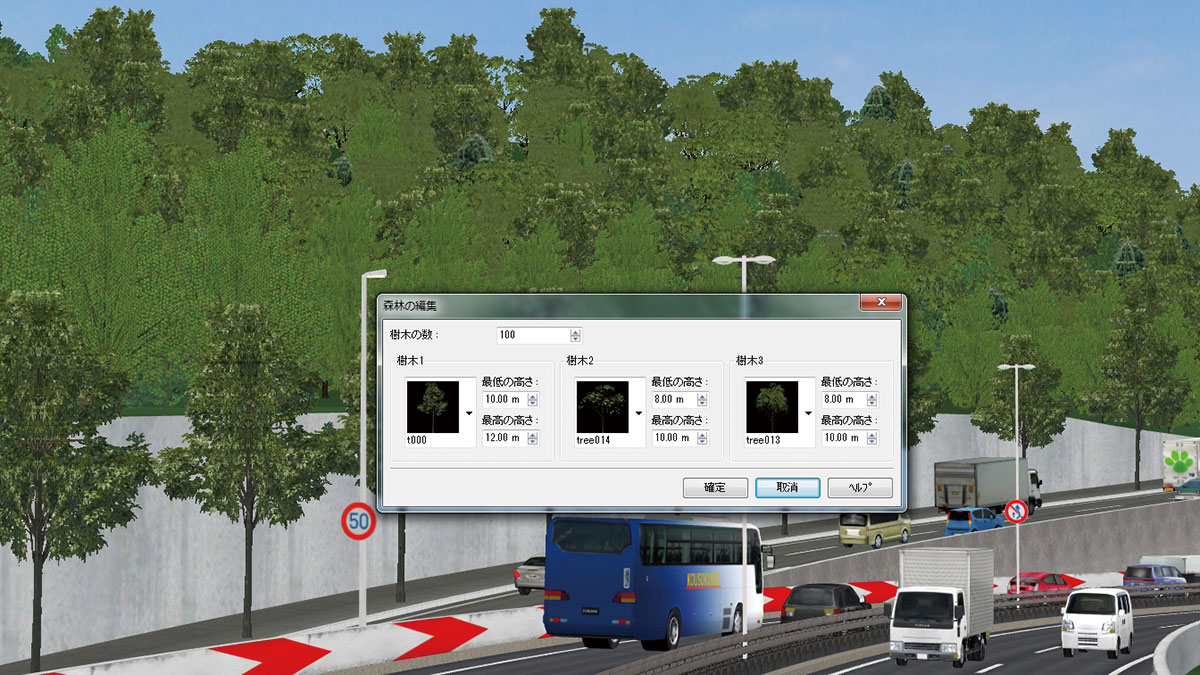
●生成森林
设置树木模型并可在指定地形范围内自动批量生成数百~数千颗树木,也可一次性删除。

●交叉口,对应环岛,L字
环岛型,L字型等交叉口生成功能的扩展。对应复杂的平面交叉,道路标识的3DS格式输出和编辑。交叉口内对行驶追加改良,可在替换后的交叉点模型上行驶。


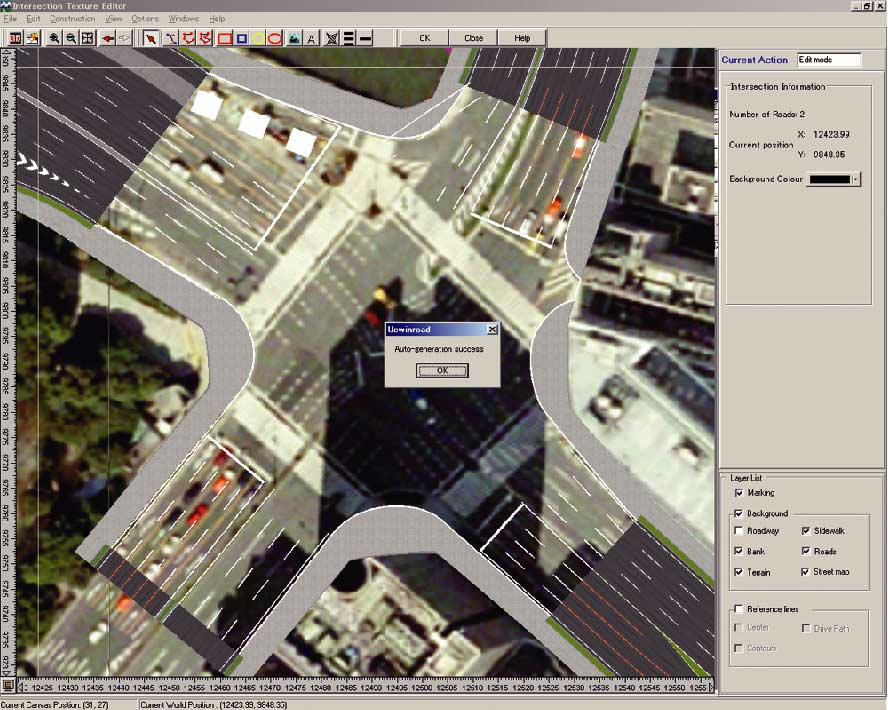
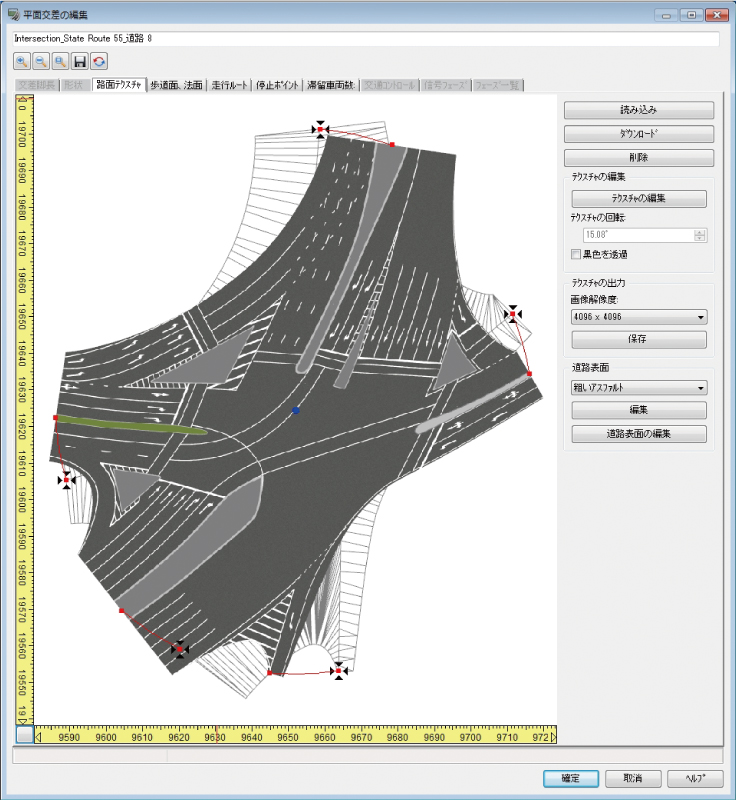
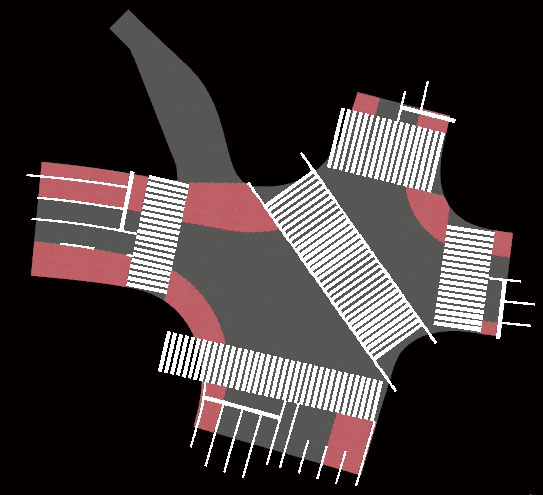
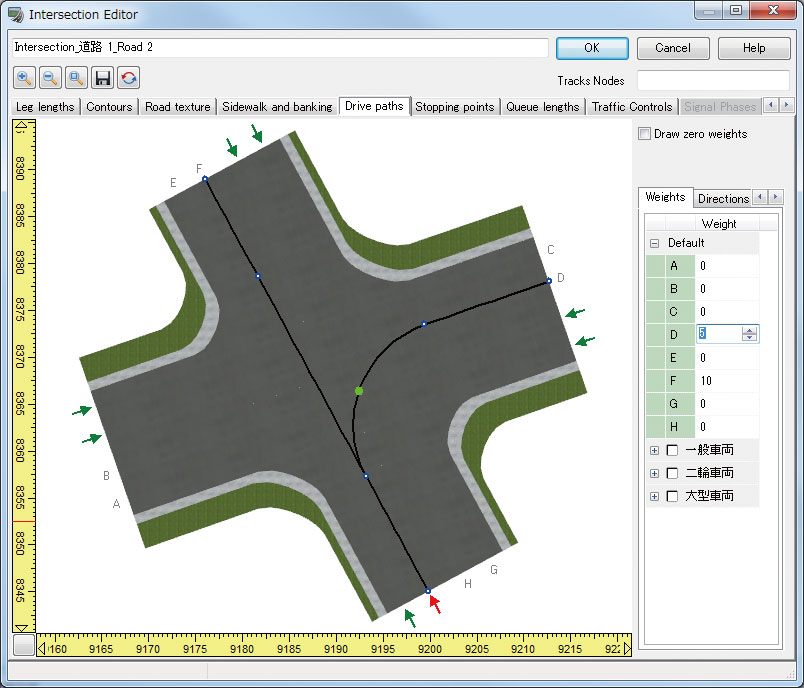
●交叉口编辑工具
半自动制作交叉口路面材质的功能。大大减轻了交叉口材质制作业务的时间。

●大楼编辑工具
可制作任意形状的三维建筑物模型。对应四角 形、圆形、任意形的组合,对应前后、左右、高度的大小、昼夜的壁面材质。
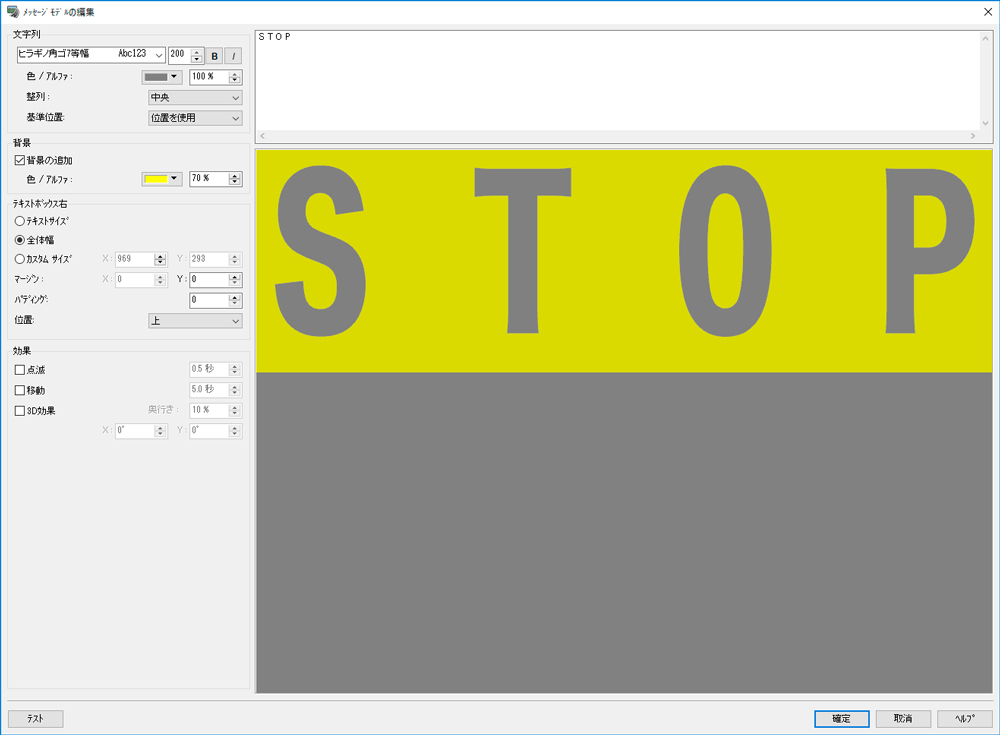
●3D文本模型
3D空间内对应3D文本的生成和配置。

●视频墙和视频播放器
对应VR空间内曲面表现的视频显示。

▲曲面で動画再生
●火与烟的表现
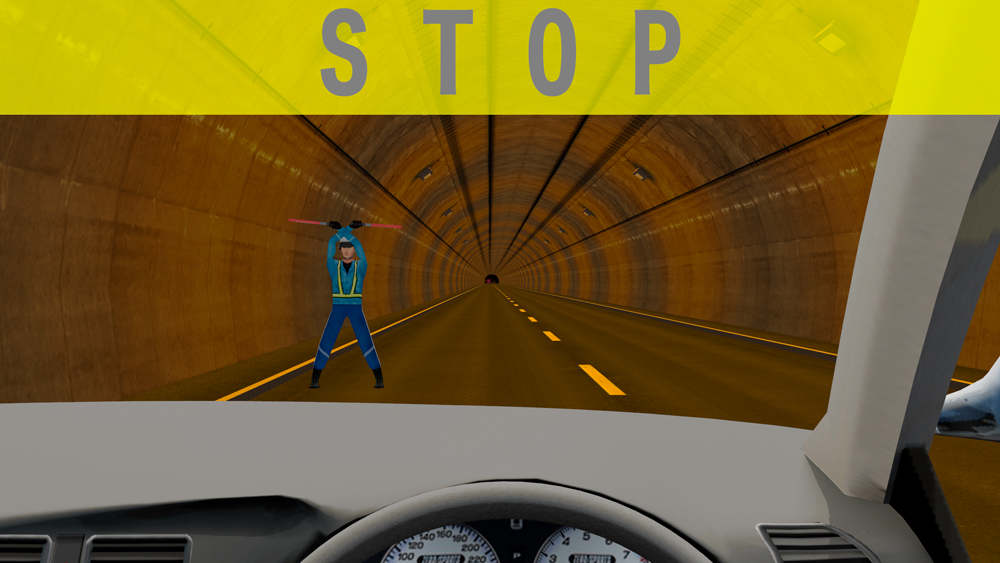
不局限于火焰、篝火、温泉、烟囱等,通过设 置可表现各种现象。提高真实感、对应通路(隧道)上烟雾的设置。


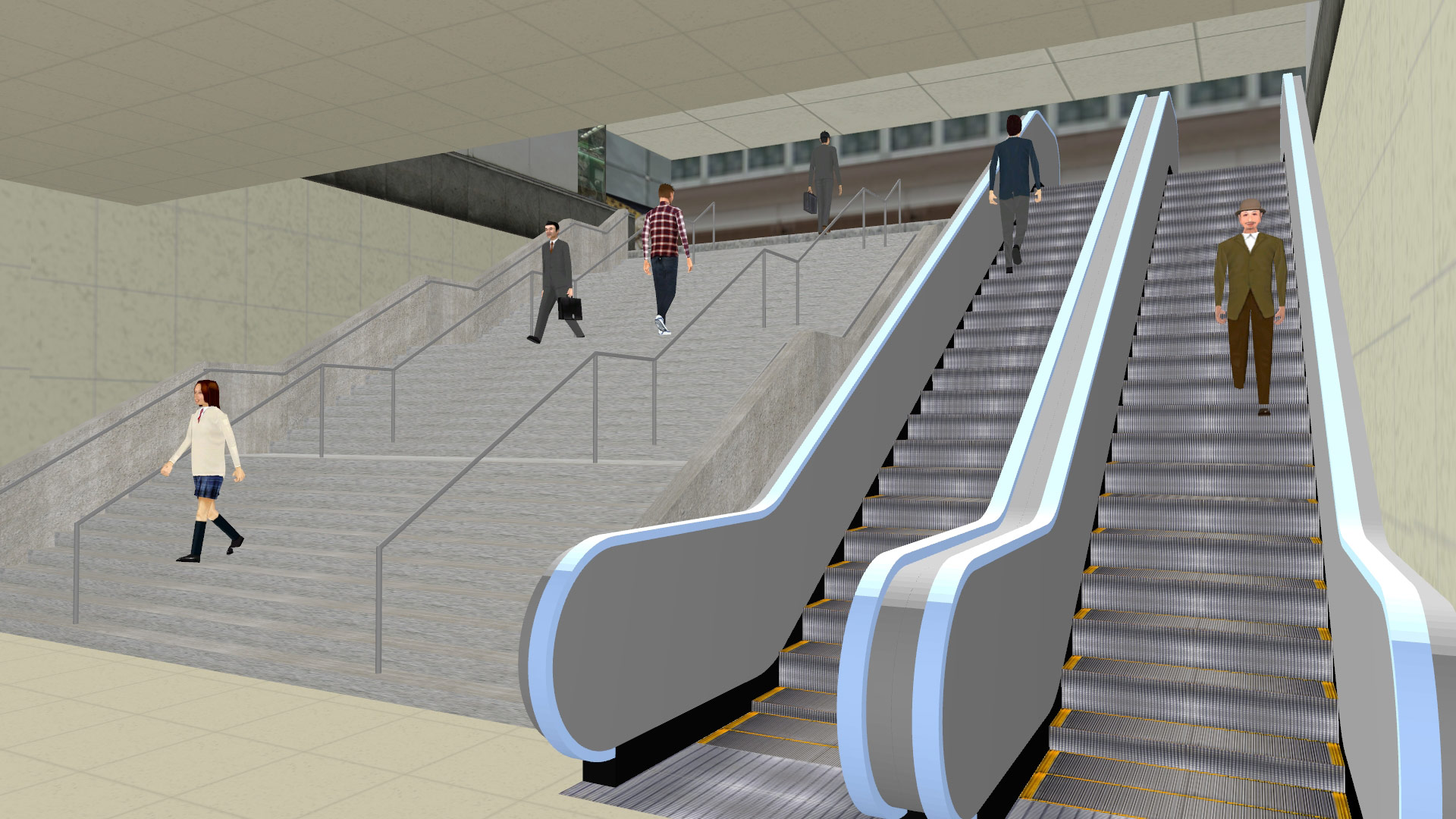
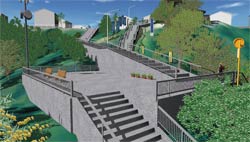
●参数3D建模
通过输入参数制作标识、台阶、扶 梯、栅栏(Fence)。对于台阶可 自定义设置纵深、高度、台阶数、材质等。
模型一览
一般模型/汽车/出租车/3D座舱/道路结构物/旗/地形材质/视频墙/建筑物/铁路/拖车/交通信号/人物/树木/火焰・烟/3D文字列

▲地形コマンド整地処理
●FBX3D模型
扩充了UC-win/Road对应文件格式。支持高精度,多种类模型的FBX格式文件。支持应用了Bone要素的动画功能及SketchUp等Collada文件的导入。



●LOD (Level Of Detail)功能
MD3字符、3D模型、FBX场景模型的表示中、 采用LOD功能

●DWG/DXF导入/导出
支持CIM的划时代的功能

●通过连接3D VR和CAD加强促进CIM相关解决方案
支持将3DCAD Studio®3D CAD格式直接导入UC-win/Road虚拟环境,还支持IFC格式。


















-
交通模拟功能
-
- 行驶车辆分组化
- 分组设定路径概率
- 交叉口内设置动作控制点、滞留车辆数
- •交通流的速度控制、消灭产生
- 场景功能(各种事件的发生)
- 交通状态保存(交通抓拍功能的场景、脚 本、景况控制)
- 场景扩展
可动态指定行驶速度、车道、限速允许范 围等。对前方车辆追加各种命令(交通 流、微观模拟播放的车辆) - •出发地点与目的地平均步行者数量设置
- 路径的种类追加(车站、阶梯/扶梯)
- 支持Rink (电梯、接待室)接续
- 对应多数步行者属性
- 对应最短路径检索
●交通模拟功能

●信号控制•道路障碍交通模拟
支持基于车辆性能的交通模拟。对应各种交通规则、信号控制、车道控制、并可实现车线灯、信号表现的交通模拟。

●交通规则设置
默认搭载有中国、日本、新西兰、韩国的交通规则,并可自由追加其他国家的新规则。
●越野功能
实装了在人行道,边坡,道路以外的地形上可以自由行驶的越野功能。

●交通连接器
道路平面线形的编辑界面或是在主菜单定义连 接移动节点的虚拟管线设置交通移动。
●行驶车辆设置•动作控制点
行驶道路、开始位置、其他行驶车辆后面跟随形式(列车等)、声音设置、通过动作控制点的设定控制匝道等。
●交通车辆车轮旋转、 舵角显示功能
通过Vehicle Editor插件可在3D模型上指定前轮和后轮,即可显示舵角。

●VISSIM对应
导入VISSIM的交通流分析结果,对应交通分析的可视化。

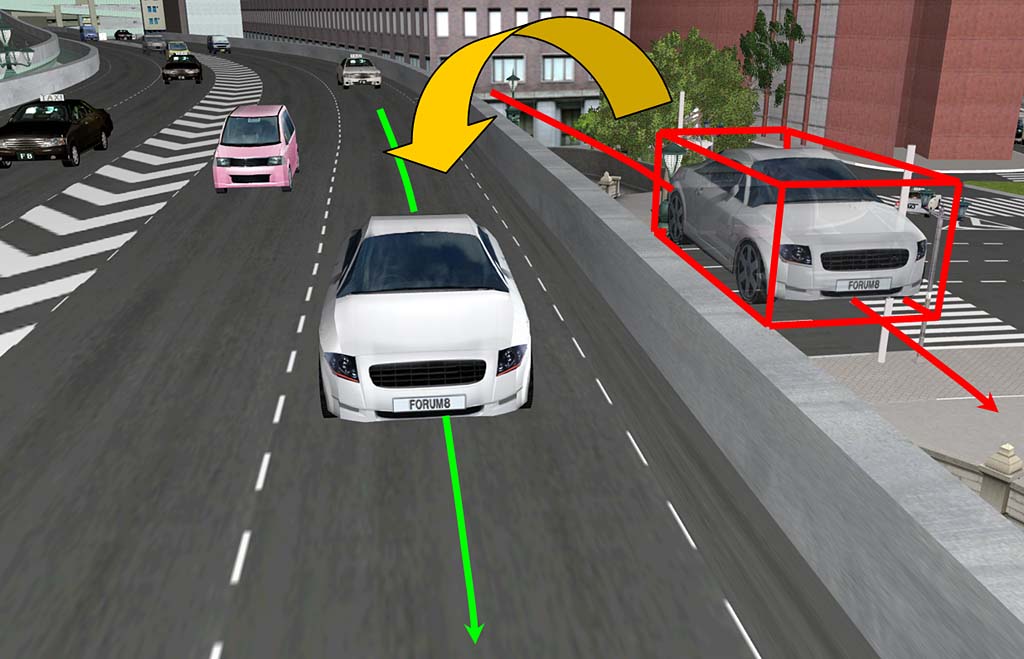
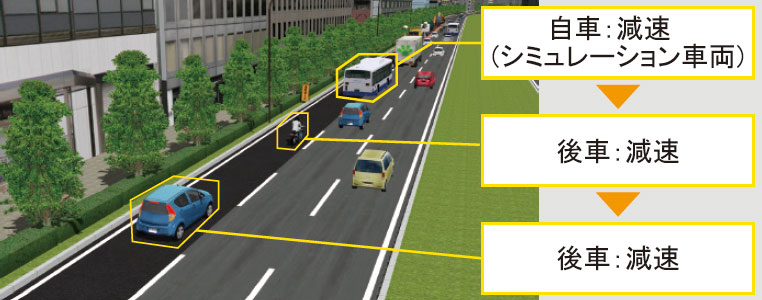
●互动功能
VISSIM、S-PARAMICS等各种交通分析软件生成的交通流和自身车辆行驶轨迹的干扰确认 (200m以内)。面向自身车辆行驶的干扰车辆自行减速。
●导航功能
明确区分了移动模式与单纯的视点操作,对应 了移动模式中的视点操作。
移动模式 可能的视点操作 自由移动 旋转、前后移动、左右上下移动、自由飞行、卫星移动、跳跃 行驶、飞行、运动移动 旋转、对象物为中心旋转、卫星移动 歩行 旋转、跳跃 追踪 对象物为中心旋转、卫星移动

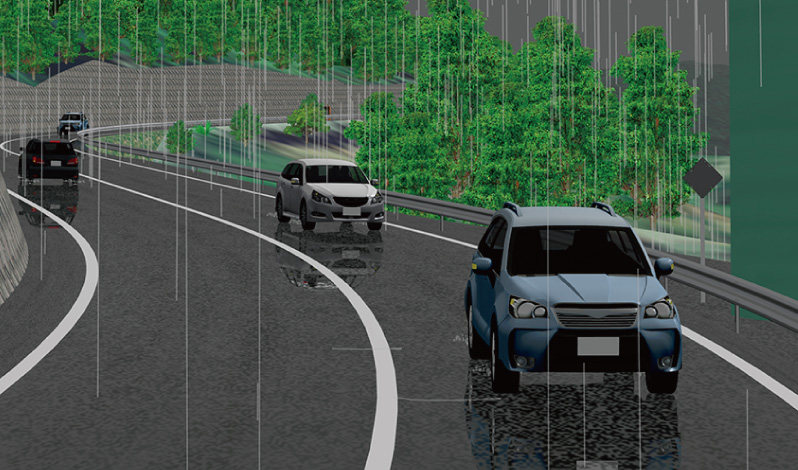
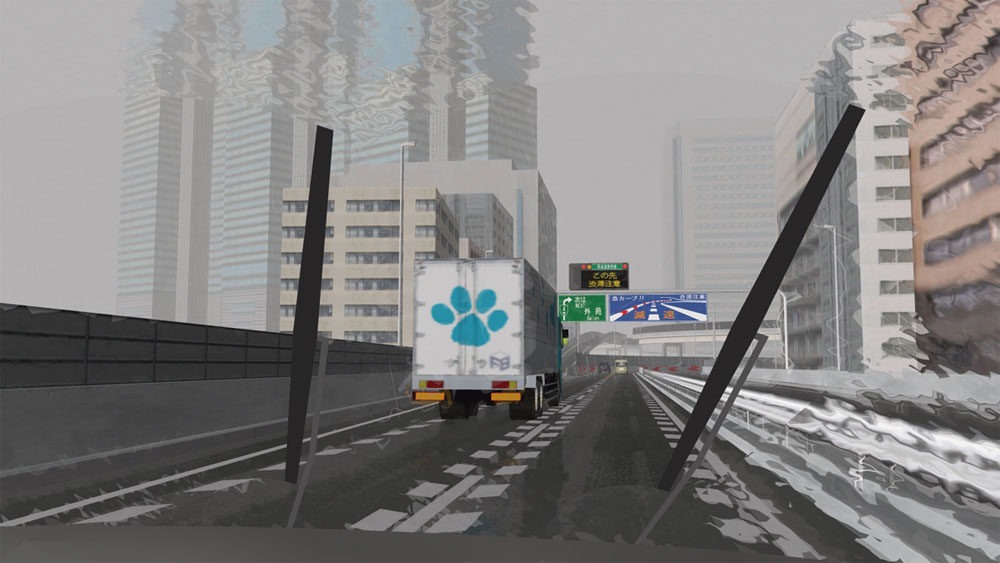
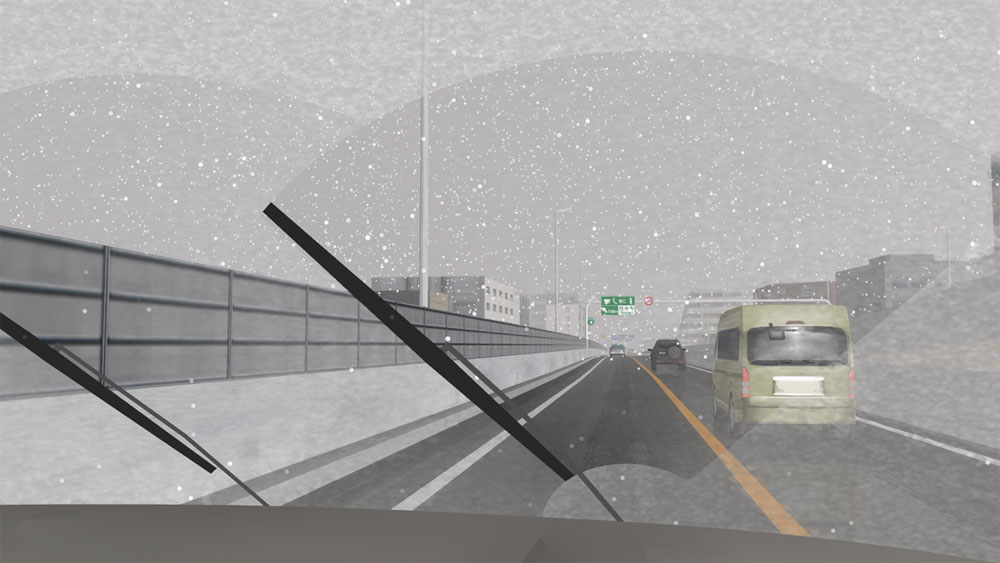
●气象特殊效果和光照
强化了雨雪的表现,追加了雾的范围指定功能、雷电效果和雨刮等功能。

▲路面反射

▲积水

▲雨纹

▲水帘

▲溅水

▲雷

▲雨刷(雨)
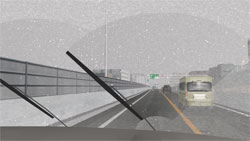
▲雨刷(雪)

▲雨刷(大巴・大货车)
●步行模拟
步行中可变更速度。追加了鼠标对步行的控制操作。
●步行者的群体移动
三维空间上配置具有宽度的飞行路径(Path Way),设置多数步行者的功能。
▲歩行者の回避行動
▲パスウェイの設定
●人造灯光/阴影
自动切换昼夜材质模彷出灯光效果。车辆模型进入隧道时可切换为该模型夜间的材质。
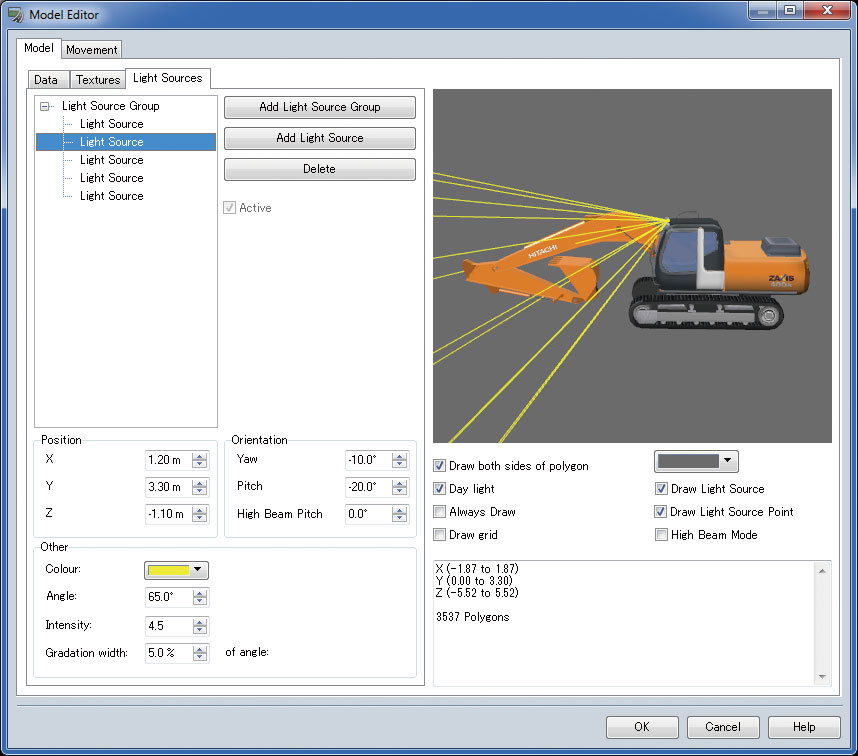
●照明功能
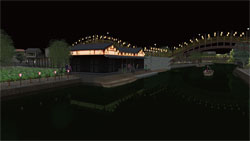
通过聚光照明、车头灯功能进行夜间模拟、照 明模拟。实装了Bloom功能,可以映照物体。也 可使用于信号灯光、车灯、夜间建筑物窗等。


●车头灯
通过聚光照明,车头灯功能进行夜间模拟,照明模拟。实装了Bloom功能,可以映照物体。也可使用与信号灯光、车灯和夜间建筑物窗等。

▲重机等特殊灯的表现
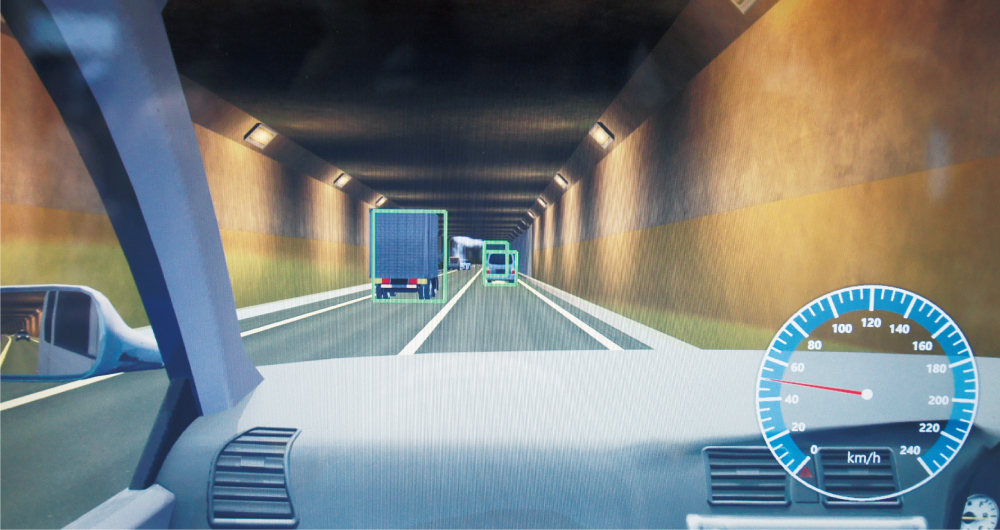
●隧道照明功能
隧道中可设置隧道空间内的照明颜色和强度。 效果可应用在驶入隧道内的交通车辆、道路的附属物。

●景况(环境保存)
1个场景中可以保存多项环境设置,点击即可执行场景功能。


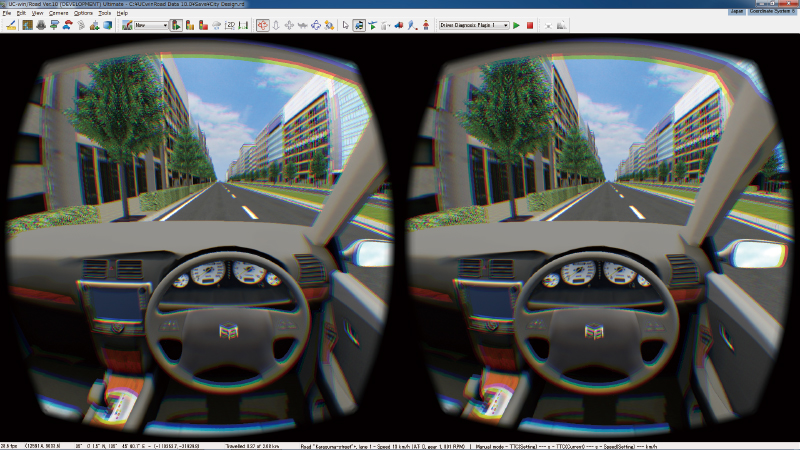
●3D立体显示
对应利用作用视差输出复数画面的偏向方式;在1个画面左右映像交互显示的主动方式。也支持宽屏画面的显示。

▲左眼显示

▲右眼显示
●用户变量功能:方案控制、日志输出等
●天幕功能
对应在球体内侧对天空进行渲染的天幕功能。
●高精度渲染(阴影/湖面反射/自动生成天空)
湖面波纹反射,根据时间自动生成天空图案。改进了阴影的渲染性能和质量。
●使用对象自定义ID的对象引用功能




















-
驾驶模拟/车辆研发
-
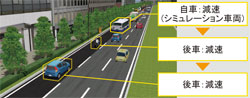
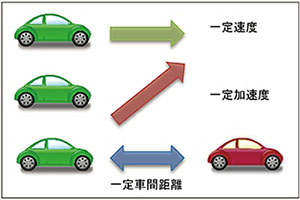
- 速度指定:忠实沿着指定的速度行驶。
- 加速度指定:忠实按照指定的加速/减速。可沿着道路行驶及任意方向行驶。
- 与其他车辆保持车间距离:与对象车辆一边保持一定距离行驶。
- 对应ABS (防锁死刹车系统)
- 仪表盘显示
- AT车对应扭矩增幅作用及爬坡现象
- 利用AT车,急加速时、上坡等高负荷时高旋转,低负荷时 地旋转
- 支持手动档车的半联动操作
- 速度自动控制
- 方向盘自动控制
- 刹车辅助系统
- 前方车辆信息重叠显示
●手动驾驶
基于不同车辆种类的汽车性能配置,对应交通流及手动驾驶。
※手动驾驶需要另售的转向控制器(方向盘、加速器)。
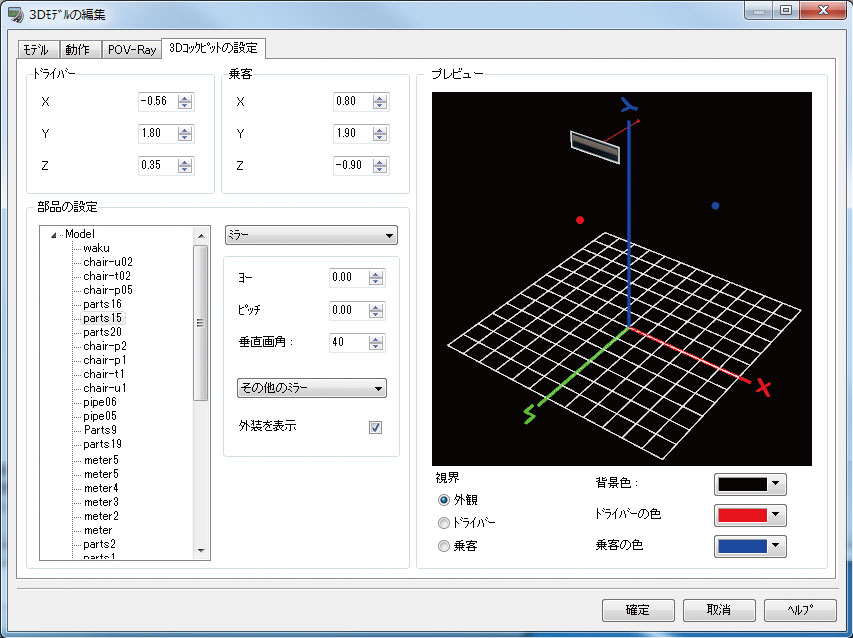
●测试镜、后视镜、车载导航显示
3D座舱内对应侧视镜•后视镜(实时显示)、导航(任意视点表示)等的实时显示。3D座舱 模型的部件可自由指定。驾驶方向盘可随驾驶操 作转动,视镜可设置视点、角度及追加视镜。
●UC-win/Road 驾驶模拟器产品信息
▲后视镜的设置

▲支持设置复数的后视镜

●汽车控制
针对机动车拓展表现可能的灯的种类,现在的刹车灯,方向表示和危险提示灯、尾灯、后灯、雾灯、小灯及拓展灯泡等10个的表现及控制。当中追求再现性的场景当中与预先记录的动作的播放使用微型模拟播放器对应后另新增了以下车辆控制模式。
▲与其他车辆保持距离
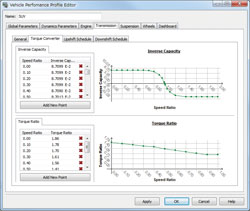
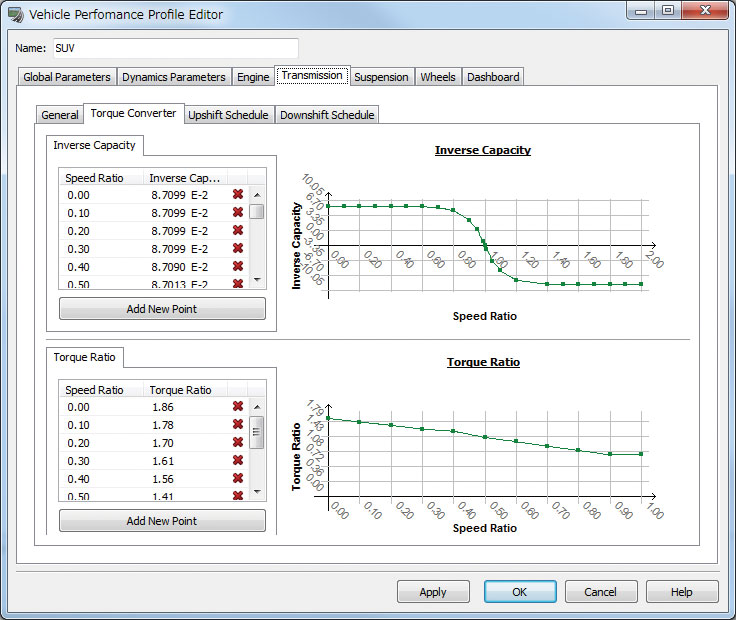
●车辆运动模型的构成
实现驾驶中的车辆整体的动作、引擎、从引擎到车轮的各项传递装置的模型,可以更加真实地表现车辆。
●驾驶模拟
搭载可进行高精度车辆物理计算的车辆运动模型,可以兼顾考虑发动机、加速器、车重、中心位置和轮胎摩擦系数等。

●ACC•自动驾驶功能
支持自身车的ACC、自动驾驶功能。可在手动驾驶/自动驾驶之间切换。也可识别信号和限制速度。

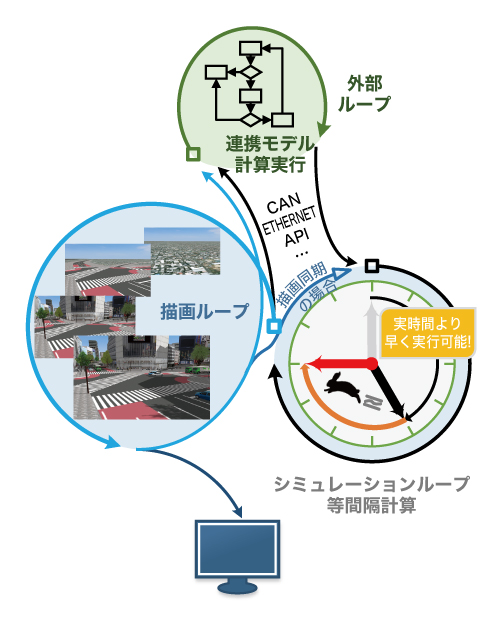
●计算周波数的控制以及SILS功能
机动车的研究开发当中,决定机动车以及各个车载机器的模拟周期比较普遍。到目前为止UC-win/Road单体当中根据PC的演算里不同将可视化与模拟计算同步并使用同样周期执行。
根据VR数据的内容不同周期也可 变。另一方面,使用内容也可柔软得执行模拟,但是进行正确的周期计算比较困难。
UC-win/Road Ver.12当中可将计算周期与影像更新周期独立设置,模拟需求(计算与显示、只计算)需要使用各种各样的模式。以下总结了各个组合以及使用目的。
并且使用SDK可对内部计时器进行二次开发。
计算时间步骤 表示同期 内部计时器 系统运行说明 应用 ON - 按照实际时间,将计算与显示同步,根据计算与表示负担不同占率可变(现模式) 应用 OFF - 按照实际时间,根据CPU的性能FPS的值将会提高。显示将根据计算机性能不同,模拟计算以下的FPS。 固定 ON ON 固定模拟的计算率,显示所有的帧率。在可能的前提下按照实际时间进行(负担大时比实际时间慢)。 固定 OFF ON 固定模拟的计算率,根据表示性能不同可能将只显示帧率。争取按照实际时间执行(负担大时有时会比实际时间慢)。 固定 ON OFF 固定模拟的计算率,显示所有帧率。根据计算机性能、FPS将增强。(不考虑实际时间) 固定 OFF OFF 固定模拟的计算率,显示所有帧率。根据计算机性能,FPS将增强。(不考虑实际时间)将根据计算机性能不同,显示模拟计算以下的FPS
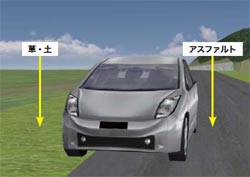
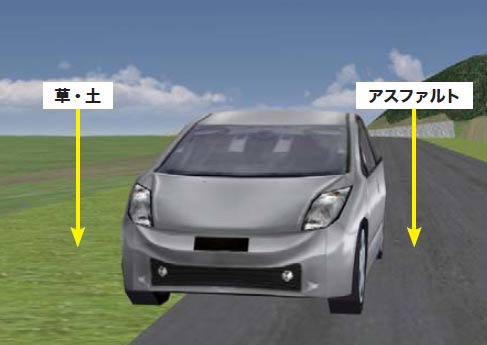
●路面属性
可区別材质设置路面摩擦系数的数值。

▲材质摩擦系数大的路面

▲易滑的路面(雪道)

●音响系统
使用了OpenAL、对应多样的环境声、其他车声、自车车声(引擎音、轮胎音、刮风音、隧道反射音)。
对应低通滤波器。对应车辆噪音(打滑音)、各轮胎噪音的表现。
●力反馈
路面材质、路面形状引起的振动以及一定范围内的振动传送至方向盘。

▲震动区域

●CAVE系统
根据屏幕和用户之间的位置关系来计算和绘制视觉体积。使用设备跟踪用户的位置变化,并更新视点和视觉体积。

●视线追踪
驾驶行驶时,通过Kinect等传感器接收驾驶员的视点位置传动至UC-win/Road中。


▲后视镜的显示变化
●边缘平滑对应
多个投影仪投影时,投影的连接部分可平滑显示。也可对应投影仪的投影角度。

●CarSim的连接功能
运用摩擦系数μ的设定值,可实现实时车辆运动模拟。

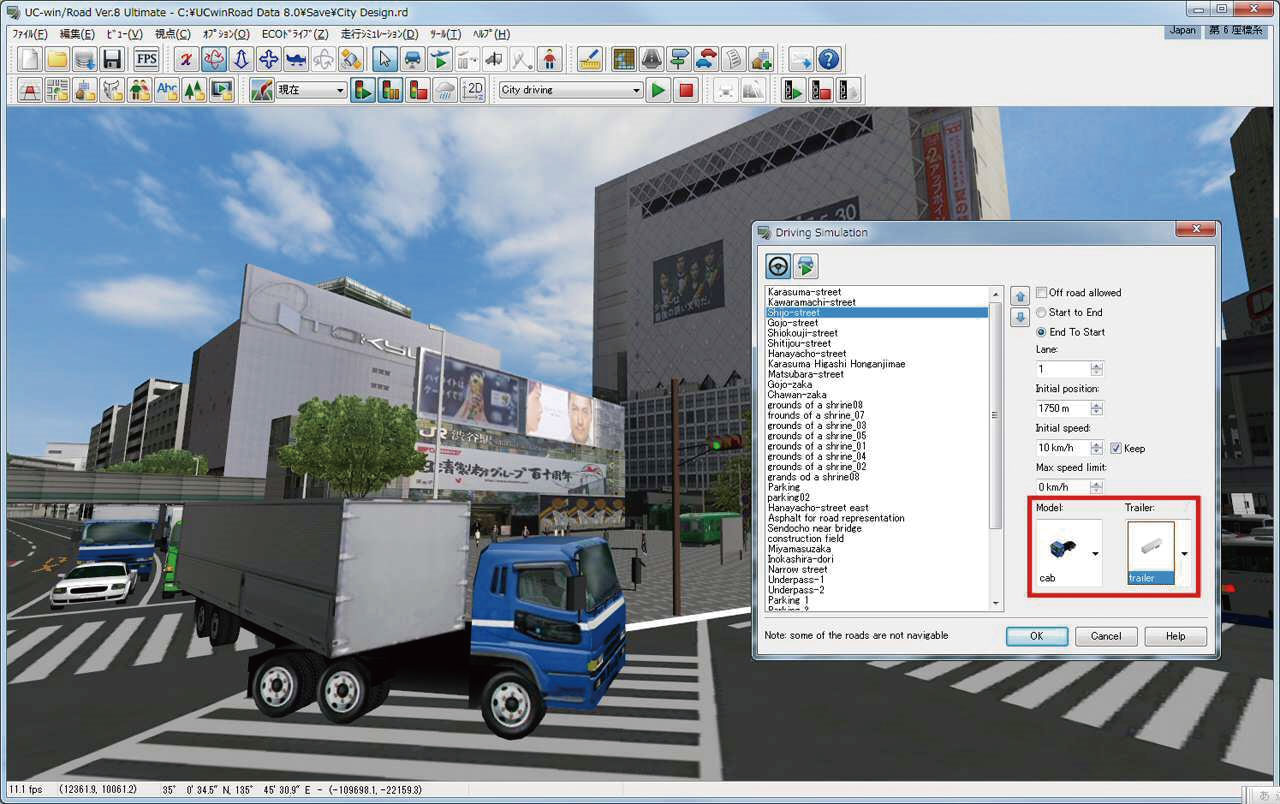
●拖车的驾驶行驶功能
在驾驶开始时的选择画面,可选择厢式模式/拖车模式










-
用户界面
-
●全屏显示、模拟面板对应
可隐藏所有菜单以及工具栏全屏显示。追加了控制面板可进行面板配置、自定义指令。

●2D视图平面显示
显示3D模型、道路和汽车等的信息和框架。一目了然地了解仿真情况。

●3D导航(3D鼠标)
通过使用[Space Navigation]等3D鼠标,可在3D空间内移动操作、同时也支持鼠标操作。

●游戏控制器,支持通过键盘进行驾驶操作
●UniversalUI插件
图片、动画、Web页面等各种内容通过点击3D图标在直观的界面中浏览或搜索。

3D・VR Solution

-
IFC数据的连接
-
▲UC-win/Road→IFC
▲运用IFC的案例BuildLiveTokyo
-
道路CAD的数据连接
-
通过计CAD应用软件与UC-win/Road间的连接提供道路、制造等土木设计、VR模拟、演示的综合系统。

可提高地图作成、用地配置、道路/铁道/宅地制作、环境影响调查等的效率。通过将UC-win/Road数据导入12d Model,可以进行土量体积计算和详细图表编辑。

▲UC-win/Road

▲12d Model
通过道路最优找寻系统OHPASS的计算结果和UC-win/Road的连接,计算得到的结果可以进行实时的观察。




-
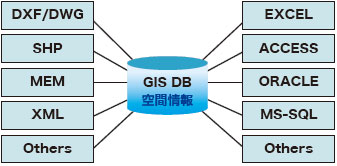
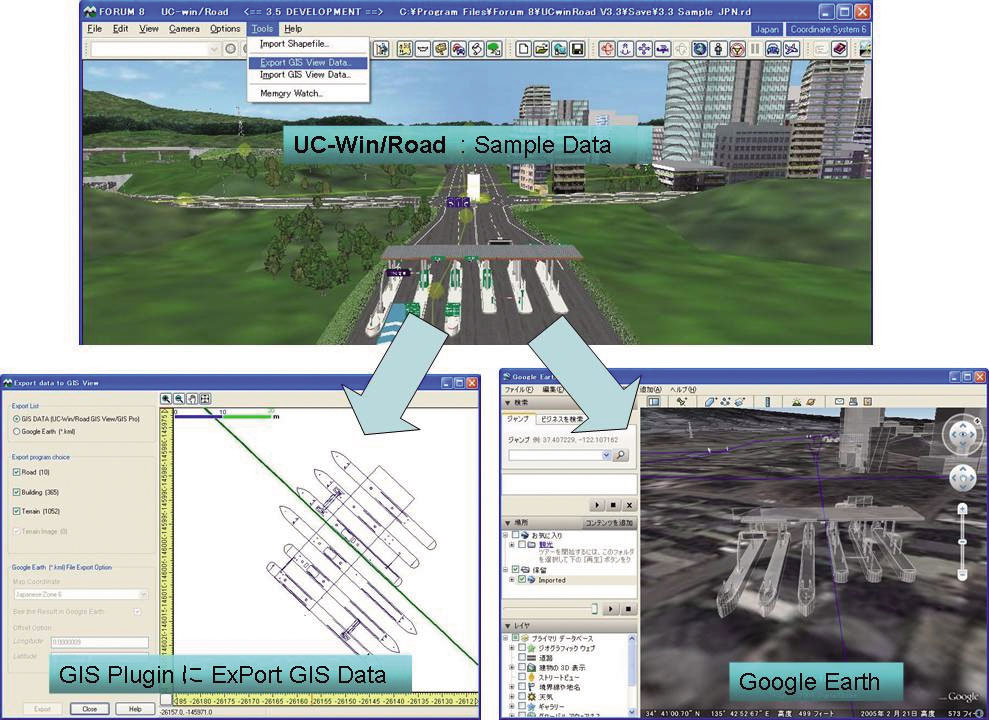
GIS数据的连接
-
以UC-win/Road为基础的GIS应用程序
卫星图片、地形、道路(Line) 、建筑物(Polygon)、飞行路径 (Line、Spline)
-
UC-1设计系列的数据连接
-
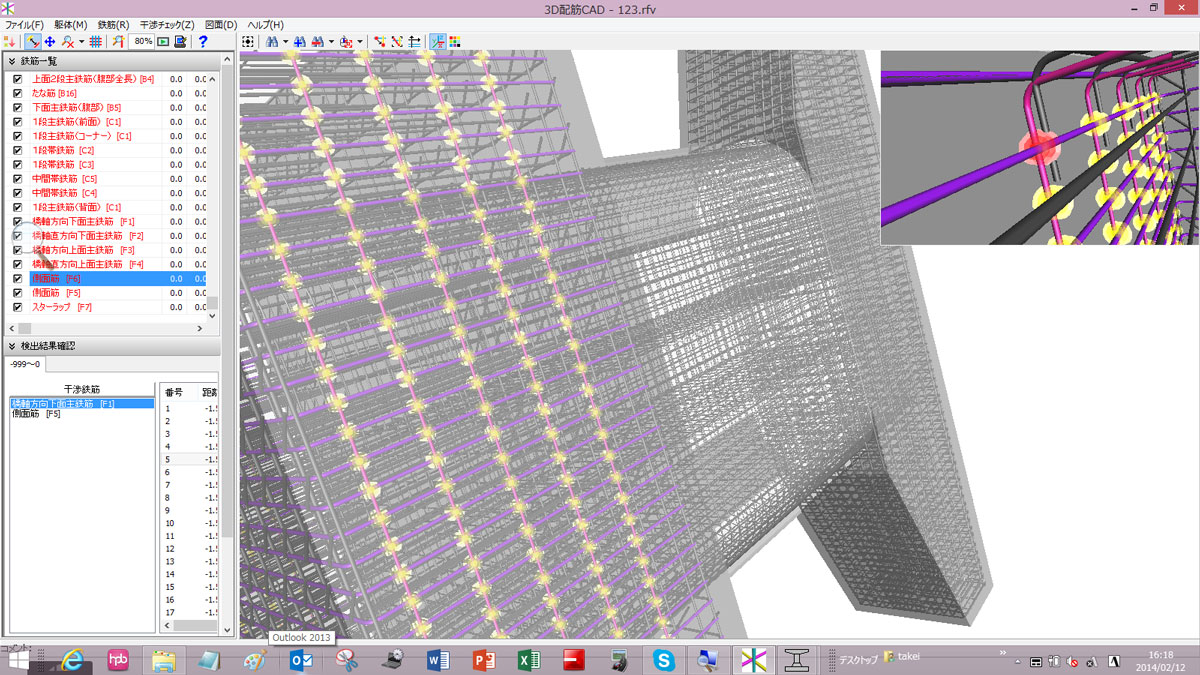
3D配筋模拟
●>3D配筋模拟
连接UC-1设计CAD系列制作的配筋图对应3D配筋模拟。
●3D配筋CAD for SaaS
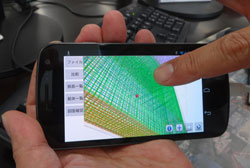
引领CIM时代的施工现场工具,支持在Android™设备上同时显示3D和2D工程图。
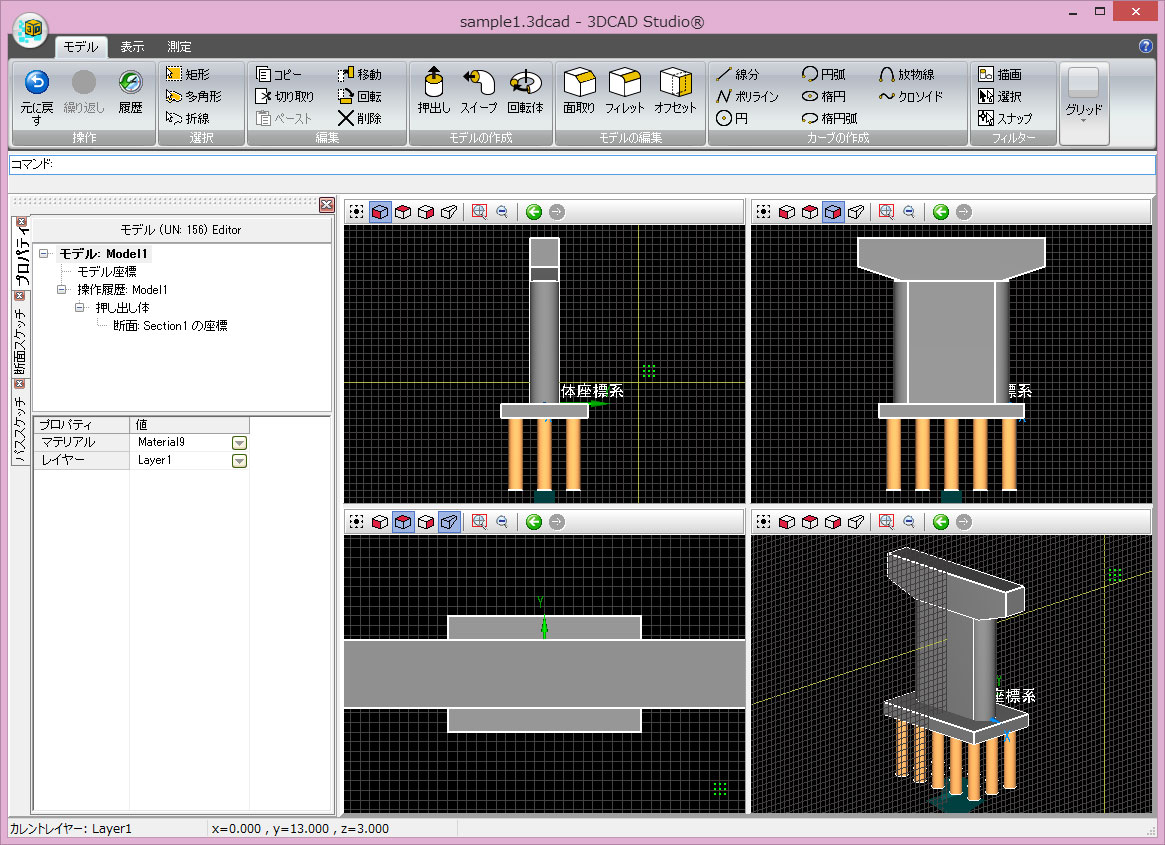
●3DCADStudio®
可以执行3D建模和与各种产品的数据连接,可以导入和导出DWG文件。

-
交通AP的数据连接
-
与交通信号设计[OSCADY PRO]、土地利用、交通建模系统[TRACKS]连接并实现VR模拟
■ 英国交通研究所 TRL社(http://www.trl.co.uk/)
与UC-win/Road连接、OSCADY PRO的解析结果可在三维虚拟现实空间中进行确认。
■ 英国交通研究所 TRL公司(http://www.trl.co.uk/)
UC-win/Road中可提供指定格式,连接与车辆位置信息。
●Aimsun
■ 西班牙 TSS公司(http://www.aimsun.com/)
通过动态分配功能,再现公共交通、步行者和自行车。

■ PTV社(http://www.ptvag.com/)
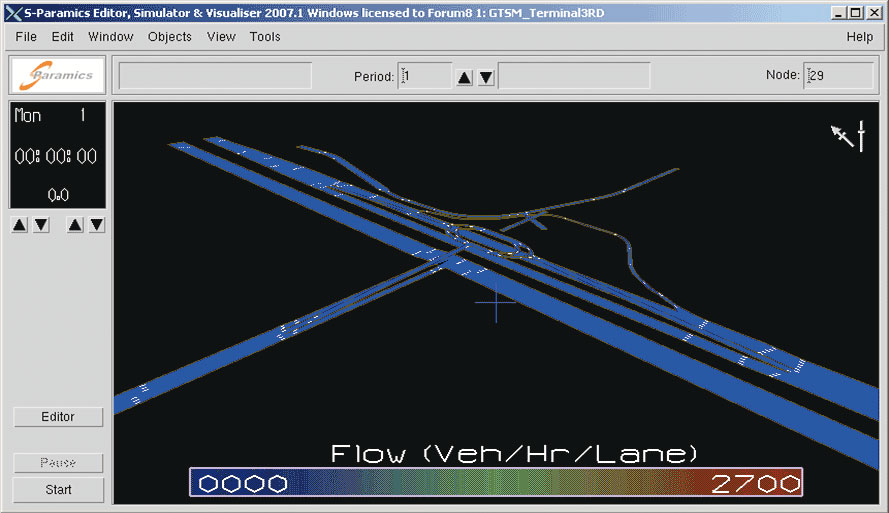
微观模拟系统VISSIM与UC-win/Road的实时数据连接。

▲VISSIM的道路数据

▲UC-win/Road的可视化结果




-
分析数据的连接
-
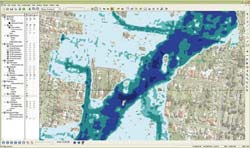
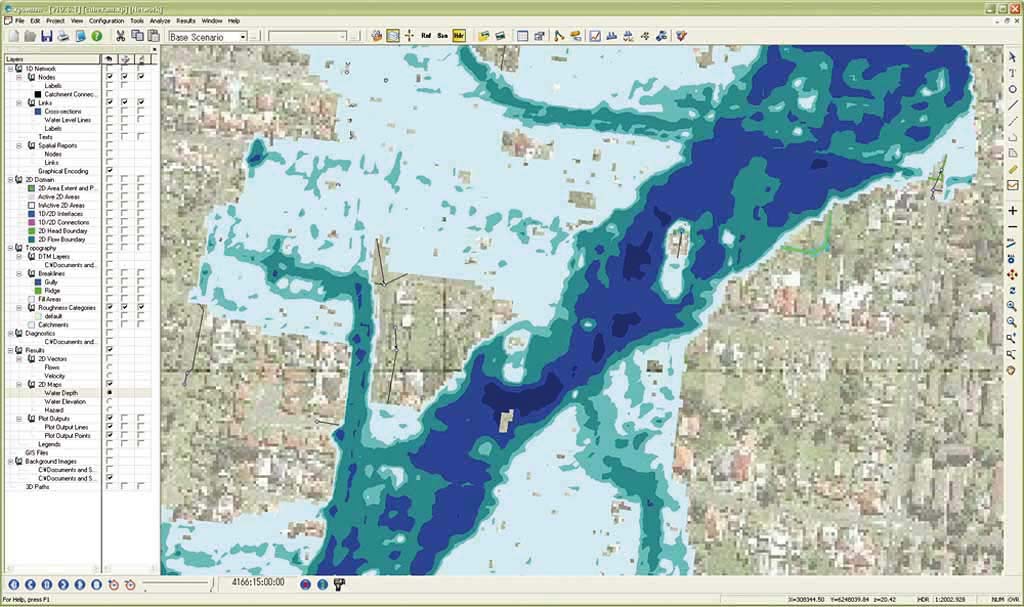
- 地形模型的可视化(导入Shape file)
- 泛滥水面的上升下降的时刻履历变化
- 泛滥水面的流速适量的时刻履历变化
- 地下管道和管内水位的时刻履历变
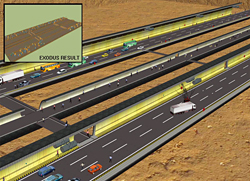
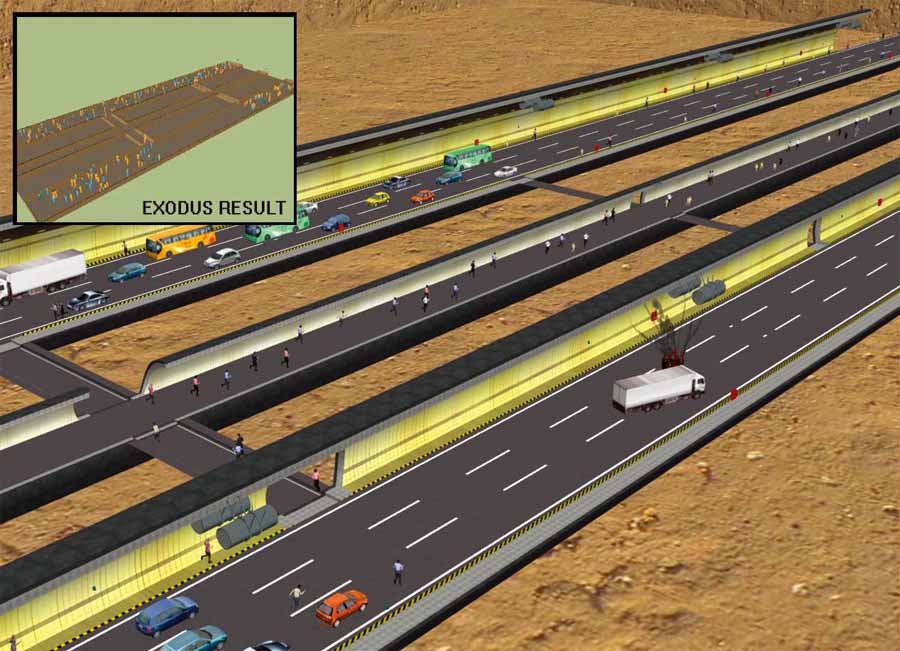
连接避难解析EXODUS和泛滥解析xpswmm的分析数据,在虚拟环境中可视化。
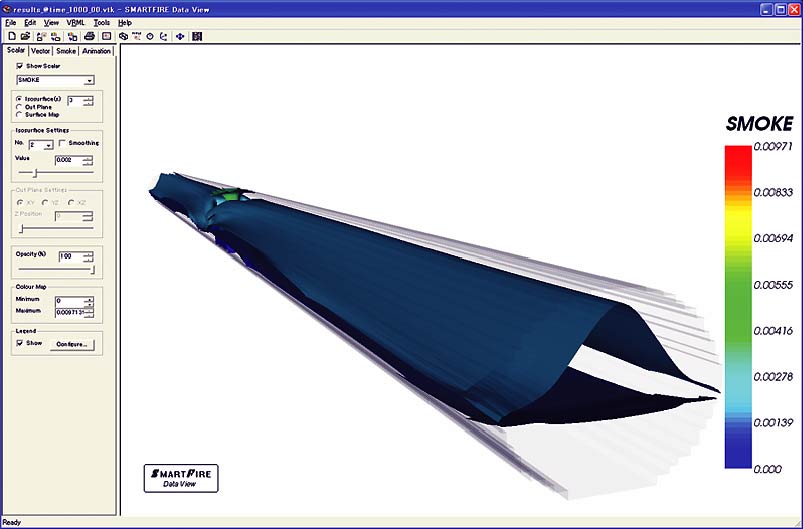
通过连接UC-win/Road与EXODUS(避难解析)/SMARTFIRE(火灾解析)可在三 维虚拟现实(VR)空间内对EXODUS的模拟结果进行确认。


海啸分析、泛滥分析软件[xpswmm]分析结果的3D可视化。
▲xpswmm

▲UC-win/Road for xpswmm


软件运行环境
-
3D数据对应格式
-
3DStudio Object *.3ds
UC-win/Road可与3DS、FBX、MD3、COLLADA、OBJ等形式的三维数据对应,可使用以下软件制作数据。
-
操作环境
-
- 驾驶模拟需要准备方向盘、刹车和油门的脚踏板(另售)。UC-win/Road的驶模拟相关请参阅以下链接。
http://www.forum8.co.jp/chinese/uc-win/road-drive-cn.htm - 从RoadDB下载样本数据、样本模型等需要连接互联网。
- 通常显卡具有多个输出端口,如果需要使用多个屏幕请务必检查这些端口是否可用。如果无法满足多屏输出,请在PC中添加显卡。
- 在订购或购买试用版之前,请确保您的系统满足最低配置要求。请在推荐设备的环境中运行该软件。
- 将屏幕格式、字体和大小设置为默认值,建议使用20英寸或更大的显示器。
数据制作 建议操作环境 OS Windows 8.1 /10 /11(建议64bitOS) CPU Intel® Core i7 4核以上,3.2GHz以上 内存 8GB 以上的RAM 硬盘 SSD硬盘
最低60GB的容量(安装包含地形数据、样本数据的套装软件至少需要30GB以上的可用容量),以及保存从RoadDB下载的模型数据和播放AVI动画所需的空间容量。显卡 NVIDIA GeForce 950 系列 GTX以上 8GB以上的内存 显示器 1920x1080以上
关于画面设计、字体大小,只支持Windows默认的Aero主题生效的默认设置。选项驱动器 DVD驱动器 声卡 任意
驾驶模拟 建议操作环境 OS Windows 8.1 /10 /11(建议64bitOS) CPU Intel® Core i7 4核以上,3.5GHz以上 内存 8GB 以上的RAM 硬盘 SSD硬盘
最低60GB的容量(安装包含地形数据、样本数据的套装软件至少需要30GB以上的可用容量),以及保存从RoadDB下载的模型数据和播放AVI动画所需的空间容量。显卡 NVIDIA GeForce 1070 系列 GTX以上 8GB以上的内存 显示器 1920x1080以上
关于画面设计、字体大小,只支持Windows默认的Aero主题生效的默认设置。选项驱动器 DVD驱动器 声卡 任意
注意事项
- 驾驶模拟需要准备方向盘、刹车和油门的脚踏板(另售)。UC-win/Road的驶模拟相关请参阅以下链接。
-
UC-win/Road 驾驶模拟器
-
- 通过UC-win/Road制作自定义的三维驾驶环境
- 通过套装软件提供标准插件
- 附带免费的VR场景数据,且支持场景的自定义编辑
- 通过描绘选项再现丰富多彩的环境
- 通过车辆的OEM批量生产实现低价格
- 通过用户自定义满足高度的模拟需求
可自定义多样化的驾驶环境并进行反复的驾驶体验。
近年来驾驶模拟器被广泛应用于车辆系统开发、ITS交通系统研究、驾驶员、车辆、道路和交通间的交互研究等诸多领域。

-
UC-win/Road 体验模拟器
-
该模拟器搭配力反馈运动平台,可以获得真实车辆的驾驶体验。可用于汽车安全技术的模拟体验(碰撞回避、碰撞减少等)、交通事故的模拟体验、最新的ITS技术体验等。


-
UC-win/Road 高速公路驾驶模拟器
-
这是运用Subaru汽车部门的技术开发的6轴运动平台(已获得专利),由Subaru技术公司开发的驾驶模拟器。该模拟器搭配力反馈运动平台,可以实现真实车辆的驾驶体验。可用于汽车安全技术的模拟体验(碰撞回避、碰撞减少等)、交通事故的模拟体验、最新的ITS技术体验等。

-
UC-win/Road 安全驾驶模拟器
-
■型号认证标准 标准场景
1. 危险预测教材 2. 夜间驾驶培训教材 3. 急刹车培训教材
4. 高速公路培训教材 5. 地区特性培训教材 6. 恶劣环境下的驾驶培训教材
■驾驶体验项目设置
7. 交规违反培训教材 8. 夜间视野确认教材
■系统组成
・中央控制装置用PC ・驾驶模拟器用PC数台 ・打印机
※通过网络连接。
■评估/统计软件
・评估软件 ・统计软件

-
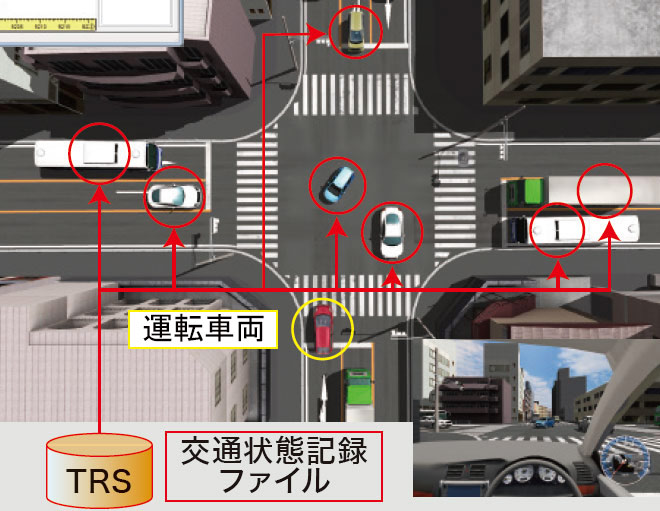
信息利用型人-汽车-交通流交互仿真系统
-
6自由度0.7G对应运动平台的高级研究用驾驶模拟器
FORUM8于2012年3月22日向九州大学大学院统合新领域学府交付了高级研究用驾驶模拟器[信息利用型人-汽车-交通流交互仿真系统]。以用于促进下一代汽车信息和控制系统的教育研究活动。

向九州大学交付了高级研究用驾驶模拟器
本模拟器是通过UC-wm/Road进行集成,将驾驶模拟器、交通流模拟器、车辆运动模拟器、HILS/ECU仿真器、视线计测装置等相连接的驾驶模拟系统。2012年5月13日在伊都校区召开的纪念九州大学10周年[九大百年校庆]中,作为研究公开及参观对象之一进行了一般公开、试乘体验等。试乘会以亲友相邀为中心排起了长队,模拟器的体验区非常人气,共计106名人士体验了驾驶模拟器。 试乘赛道是从本公司福冈营业所附近(大博通)开始,到博多站为终点的约2分钟内容,[丰富逼真地表现,图像也非常流畅美观]等,获得许多好评。此外,FORUM8还于2012年3月向京都大学大学院工学院工学研究科交付了高级研究用驾驶模拟器(六自由度5通道)。




▲信息利用型人-汽车-交通流交互仿真系统展览会
(2012年3月23日/于:九州大学)

-
8DOF交通安全模拟器
-
8DOF交通安全模拟器 Traffic Safety Simulator
该模拟器系统是以三维虚拟仿真软件UC-win/Road为基础的高性能大型驾驶模拟器。
中国交通部为了研究交通安全,由交通运输部公路科学研究院制作、搭建的大型驾驶模拟系统。在2009年1月的国际投标中由FORUM8单独中标,系统最终于2014年2月完成验收。

-
车辆性能验证装置高精确度驾驶模拟器
-
世界首发※1)、真正意义上实现了在仿真(VR)空间内使用大型5面立体视觉的驾驶模拟器进行驾驶以及车辆行走模拟。通过逼真地模拟驾驶时的视觉环境、震动环境,可以实现模拟驾驶车辆的特性与灵敏度的检测和数字模型的建立。 名古屋大学在2015年6月购买了这款驾驶模拟器。在Natinal innovation complex(NIC)内进行了设置。
>>车辆性能验证装置高精确度驾驶模拟器介绍(英文版)
(PDF、2,012KB)
●2016/02/16
BBC的采访报道中介绍了世界首例4K5面立体视野DS(名古屋大NIC)。
※1)在目前(2015年6月)公开的模拟器中,将大型5面沉浸式显示器和运动驾驶舱部相组合是世界首次案例。

-
3DVR挖掘机远程操纵系统
-
- 事前模拟・・・无需到现场,通过虚拟环境进行检讨和确认!
- 培训/安全教育・・・体验与实物相同的驾驶操作!也可用于培训和安全教育。
- 作业监视/作业指南/作业指示・・・可以从任意地方下达任意且详细的指示!
- 复数车辆控制・・・可以对多辆挖掘机进行协调控制与监控。
- 支持自动驾驶・・・自主驾驶系统的集中管理,也用作为开发平台。
- 远程操纵训练模拟器(日本国土交通省九州地方发展局九州技术事务所)
- 3DVR联动远程施工系统(旧(独)土木研究所技术推广本部)
- 除雪车辆驾驶教育用车辆操作模拟器(中日本高速公路株式会社)
- 除雪车驾驶模拟器(株式会社NICHIJO)
- 矿山用自动驾驶模拟器(日立建机株式会社)
运用3DVR进行远程的管理、监视、培训和教育
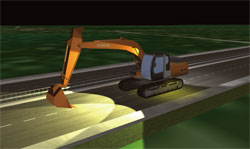
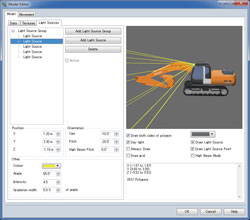
运用3DVR(虚拟现实)系统对支持远程控制和自动驾驶的挖掘机进行环境模拟、操作培训和安全教育,以及对多个起重机的集成管理进行模拟验证。当发生大规模灾难时可以在危险区域远程操作无人的挖掘机,也可用于定期培训、安全培训以及提高现场工作效率。在该系统中,通过再现挖掘机驾驶舱的控制设备和远程控制设备并与连接3DVR系统,可以在3DVR空间中通过手动控制和远程控制来控制实体的机器。
>>3DVR挖掘机远程操纵系统介绍(日文)
(PDF、6,043KB)
特点
3DVR系统与远程控制和自动驾驶的运用相关如下。

运用案例
-
UC-win/Road 二次开发系统
-
- VR运动座椅
- Lily Car
- 超大型DS系统:由6轴+ Yaw・轴以及全周8台投影集群构成
- UC-win/Road 自行车模拟器
- UC-win/Road 轮椅模拟器
- UC-win/Road 铁路模拟器
- UC-win/Road 驾驶设备设置位置探讨系统
- UC-win/Road 船舶驾驶模拟器
- 施工机械人机界面
细分化组件实现高度柔软低成本的开发
●组件的变更/追加变得更加容易(驾驶模拟系统)
UC-win/Road车辆模型的变更,用户硬件的变更和驾驶状况的记录输出等的客制化开发事例等。使用从前的组件构成(右图、去除追加事例)从通常的游戏方向盘当中取得脚踏板和方向盘的操作量数据,计算车辆的运动。并且,还可进行与车辆的加速度和轨道独立组件的计算,因此可进行车辆的引擎运动模型的客制化,路面和轮胎的粘着模型的需求对应。追加了「模拟踏板装置输入」和「踏板操作输入切换」等组件,实现了游戏控制器与其他硬件的共存及对应模拟装备。最后,通过「日志的取得和保存」及追加组件,可获得或输出驾驶模拟系统相关信息。
VR-Studio®中开发中的高度化功能及新功能的使用
●新组件的开发/开发中产品的预取
为实现客制化新功能的开发,我们独自开发基本技术,进行广泛的套装软件新功能的设计与开发。驾驶模拟的场景功能为顾客的专门技术的研发等提供帮助。在场景中,可以进行驾驶模拟并通过事件触发功能来采集驾驶员反映。并且,使用最新电脑图绘技术和Shaders言语,积极开发地形材质处理和光源高级表现等技术。
与硬件结合实现高度模拟
●UC-win/Road驾驶模拟器运动平台
产品与硬件连接也可进行UC-win/Road驾驶模拟器的客制化等。
通过[运动平台]可以实现更加真实的驾驶体验。DS的开发案例涉及有汽车研究、安全系统开发、训练模拟器、广告用模拟器和铁路模拟器等多个领域。与硬件连接不但可以发挥实时三维VR的特点,也可生成多样化的3D空间,以及自定义场景和触发事件等各种模拟需求。
-
FORUM8 停车场解决方案
-
- 使用手机与平板电脑就可以进行停车场的搜索和预约的移动应用程序。
- 私人停车场、可停车的任意场所的所有者提供出信息,想要停车的人就可以利用停车预约系统。
- 除了回避交通混杂、堵塞、减少尾气的环境方面的考虑以外,人与人之间的合作互助、社区创造的推进,用户的社会贡献等方面上都有很好的效果。这就是为什么将其命名为“有机”。
- 不仅仅是停车位的确保。此服务会进一步优化使得参加赏花大会,烟花大会等各种活动时的可以顺利占位。
- 基本功能:因为显示了地图,可以更加实时地显示空位。对应收费停车场、道路上的停车空间,私人土地的空间。
- 用户可以更新实时空位的状态、出停车场时也会通知有停车位空出的信息,并且向正在寻求车位的用户发送信息。
停车场解决方案
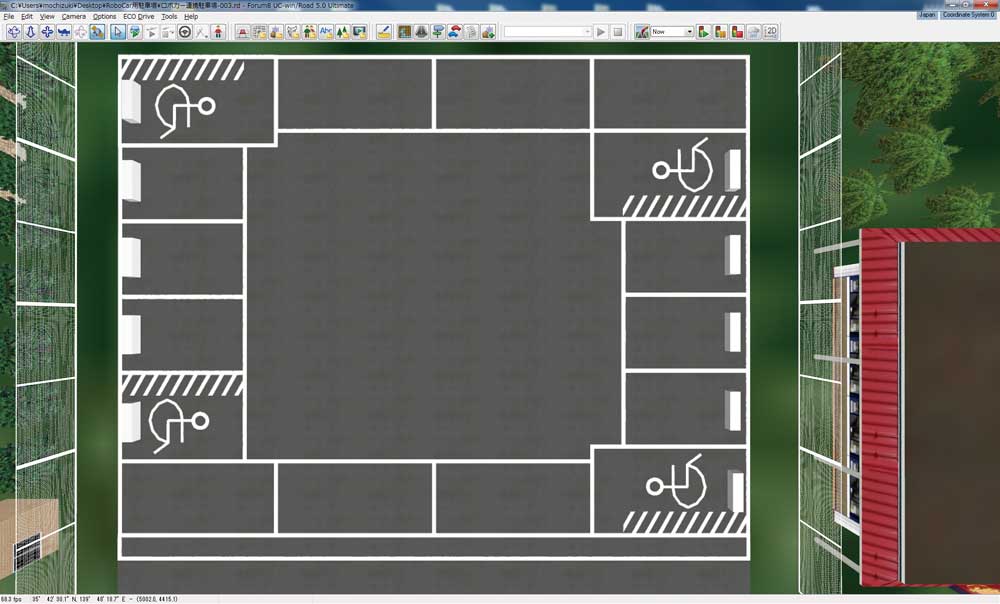
FORUM8公司提供各种解决方案,如将车辆轨迹图制作/停车场/设计CAD与UC-win/Road连接实现停车场模型制作、VR模拟与RoboCar®同步实现自动泊车系统、基于VR-Cloud®的停车场检索与导航系统等。

■VR-Cloud® Parking NAVI系统的停车场预约流程
●Organic Parking
美国的Organic Parking公司所开发的服务,其理念是通过缩短寻找停车位的时间,使得交通混杂、堵塞得到缓解,从而进一步实现绿色社会。
此服务已经取得了美国专利,目前正在申请国际专利。此次FORUM8取得了其在 日本的独家开发权,正在面向 日本国内市场为顾客进行定制。

▲扫描二维码或点击下载


-
UC-win/Road 车辆轨迹/停车场CAD连接自动停车系统
-
- 车辆轨迹制图系统
本程序是基于《半拖车及全拖车的直角旋回轨迹图的样式(JASO Z 006-92)》等制图理论的车辆行驶轨迹计算/制图系统。利用本系统可以高效完成针对假设路线,现有路线的行驶模拟、车辆轨迹、车辆详细状制图。 - 停车场制图系统
基于《标准停车场条例、道踣构造令》等制图理论支援符合停车场规范的停车场设计CAD系统。制作完成的停车场图纸输出为CAD数据在《车辆轨迹制图系统》中使用。 - UC-win/Road
RoboCar® Auto parking plugin
提案系统
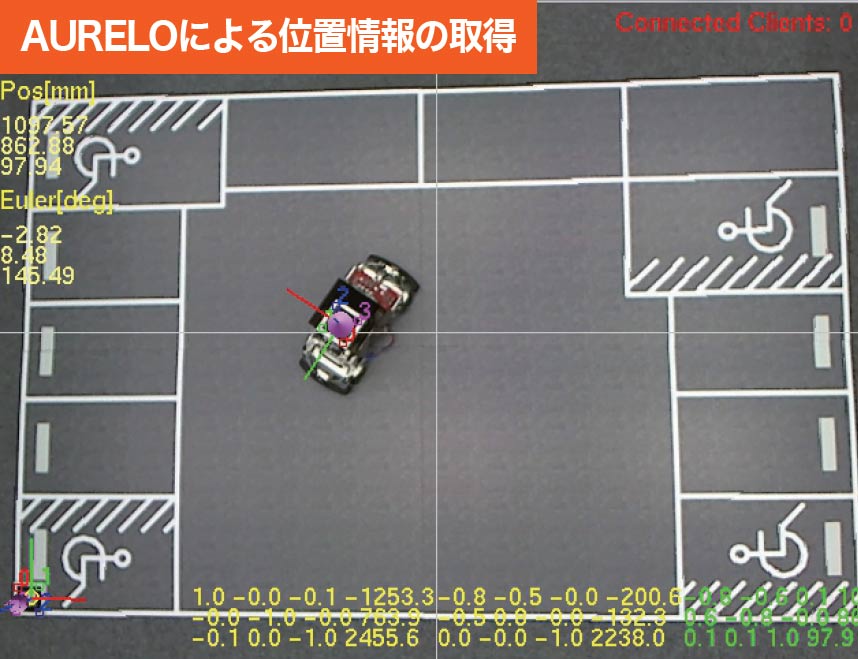
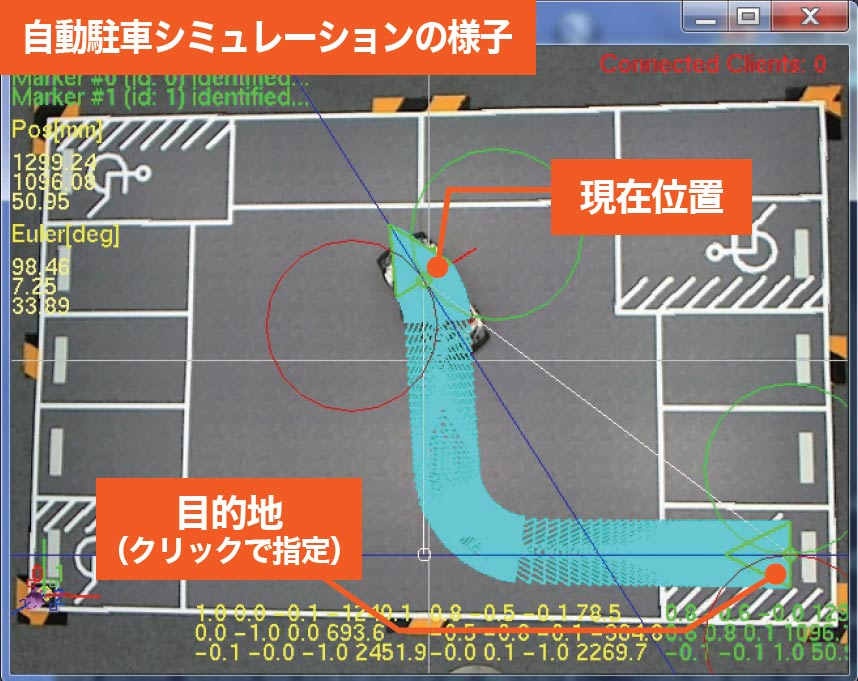
连接UC-win/Road与RoboCar,以摄像头图像与超音波感应器信息为基础实现泊车时的方向盘自动操作系统。驾驶员在车外按下按钮,车辆将自动完成停车操作。
车辆轨迹制图/停车场设计/自动停车系统综合解决方案
车辆轨迹图制作以及停车场制图/设计CAD连接实现3D/VR模拟。
并将其VR模型与RoboCar同步实现自动停车系统。

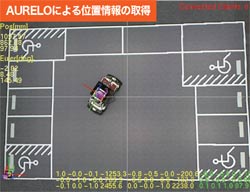

▲使用了AURELO的RoboCar®自动停车模拟

▲在UC-win/Road上中确认自动停车
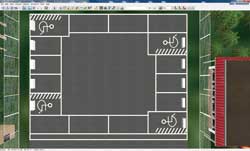
▲停车场的VR表现
从任意的视点确认停车场状态 - 车辆轨迹制图系统


-
FORUM8 Robotics
-
- 钢筋混凝土桥的近距离检测
- 床面的近距离检测
使用自动机器装置的最新的解决方案
汽车机器人平台と和VR的融合
UC-win/Road可以短时间内轻松地制作成的大规模仿真空间。通过与RoboCar®连接,不仅仅是VR,可以用于混合现实的模拟器,可以期待各种模拟器的运用。
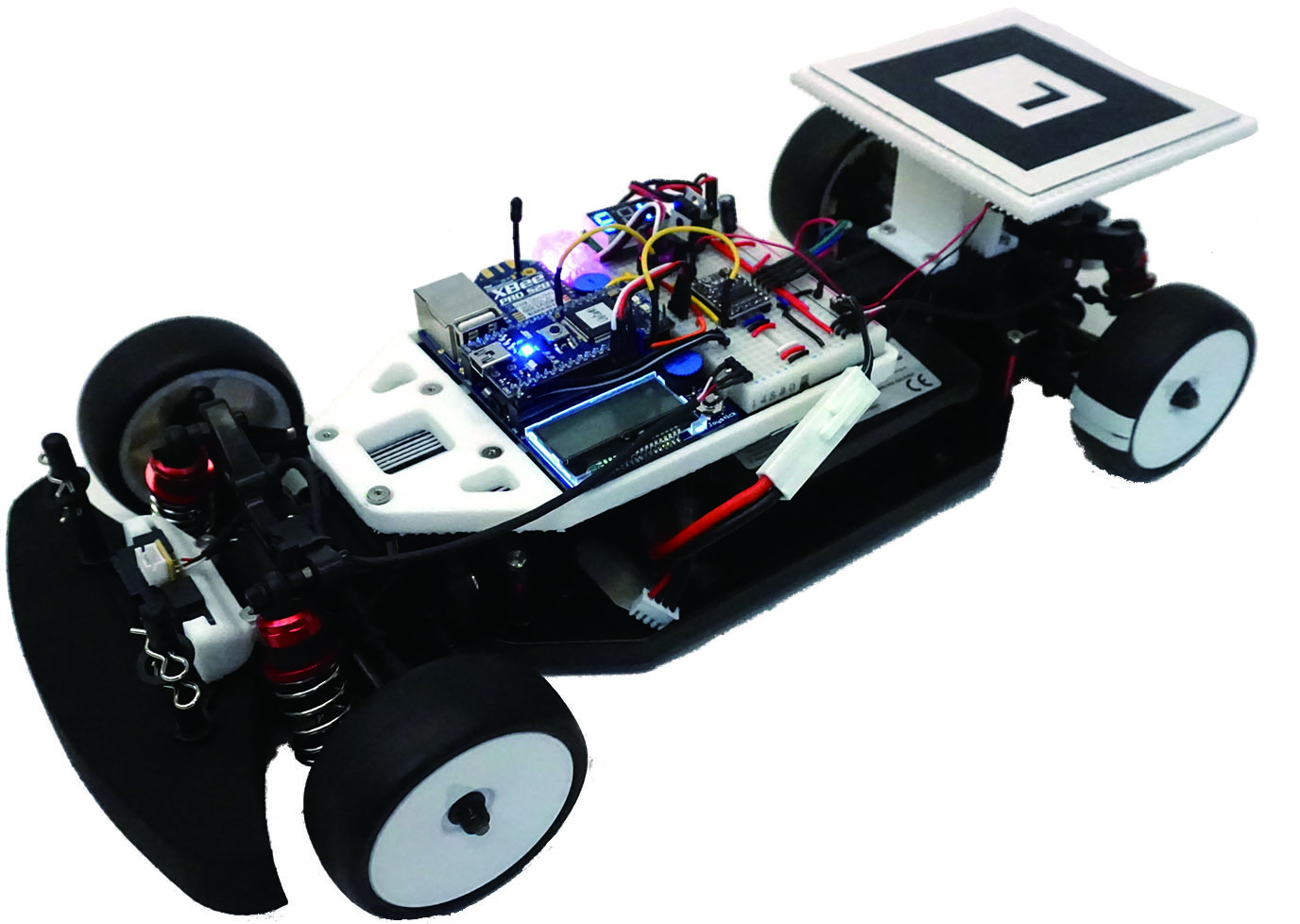
■RoboCar®
将驾驶模拟功能非常充实的现实仿真软件UC-win/Road与搭载了汽车机器人平台的机器人技术相结合。在VR空间内的道路上驾驶体积为实车10分之一的模型车的VR模拟系统。通过利用VR中的虚拟现实空间,可以表现出精致的空间、多种多样的交通环境、设置脚本进行实验模拟。
■UC-win/RoadとRoboCar®的连接
UC-win/Road中可以表现精致的空间、多种多样的交通环境、设定脚本并进行驾驶模拟。其次,RoboCar®的特点是体积只有实车10分之一的模型可以在现实空间内行驶。通过组合这些特点,可实现在虚拟现实环境中无法验证的混合现实的模拟。

▲在模型中制作驾驶环境(左图)

▲在VR空间内进行模拟驾驶(右图)
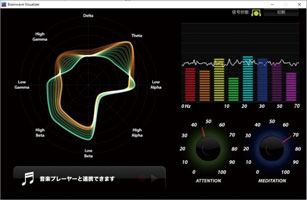
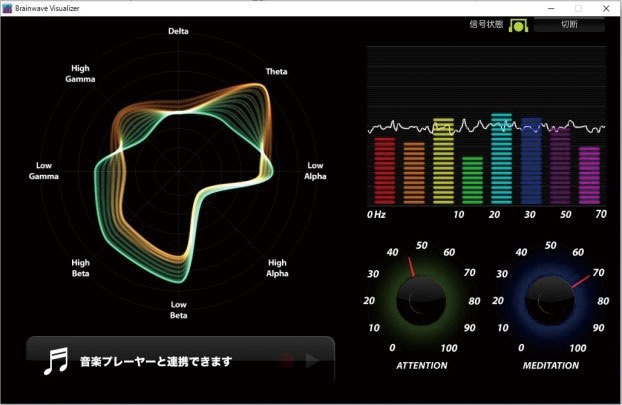
●Mind&VR UC-win/Road for MindWave Mobile
使用脑电波测试装置MindWave Mobile在UC-win/Road上进行驾驶模拟
MindWave Mobile(开发公司:NeuroSky)是装载了脑电波感知器的无线立体声装置。戴上它,会测出alpha、beta等不同频率的脑波。并且通过独自的演算法把脑电波与注意力集中程度、放松程度等心理状态进行转换。 MindWave Mobile插件与VR数据项结合,运用所取得的数据可以进行操作模拟。左图的驾驶模拟是通过主力已的集中度来控制速度,如果凝视画面中的一个点速度就会变快,注意力散漫的话速度就会变慢。

▲MindWave Mobile(Neurosky)
▲MindWave Mobile(Neurosky)
■运用案例
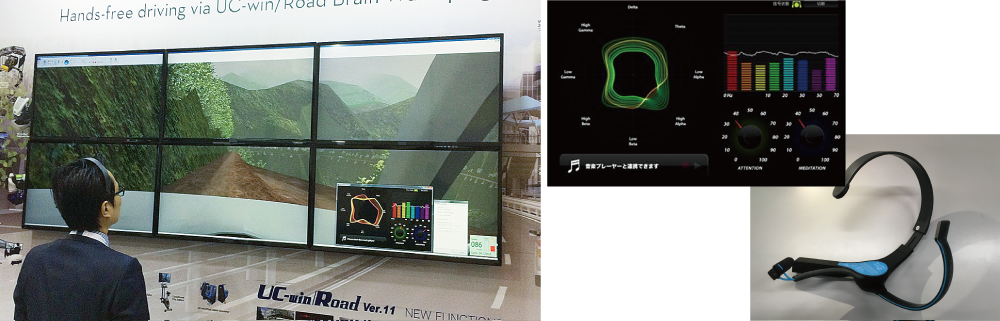
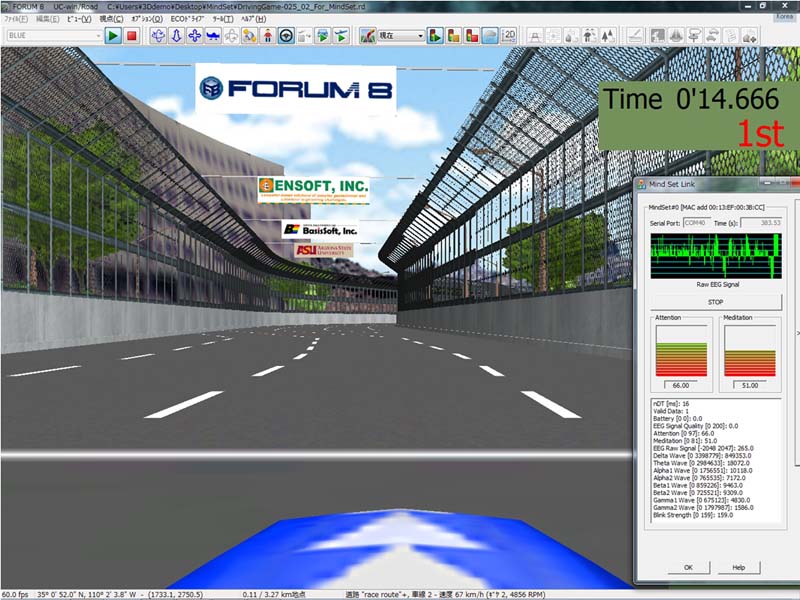
UC-win/Road MindWave Mobile插件
戴上MindWave Mobile,在连接状态下开始驾驶模拟可以根据脑电波来控制车辆的油门跟刹车。

作为EEG技术应用事例列举了F1赛道。实时(@60Hz)读取2套MindSet设备,开发了可抽出Meditation和Attention系数的接口。

▲Phoenix F1 circuit

▲具有游戏性,作为展示用系统受到好评
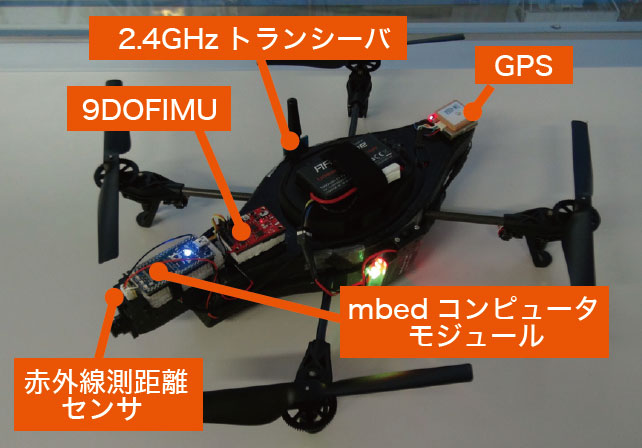
●自主飞行UAV
自主飞行监控系统
■通过鼠标、键盘进行操作 通信信息等数据利用Wi-Fi进行无线传输
■通过内置计算机自动控制平衡。上升、下降、前后左右的移动等高难度动作可简单实现
■使用前置照相机、高速照相机确认,可通过FLY-DV照相机进行详细记录
■通过GPS测定AR.Drone的位置
■通过9D0F IMU (轴惯性计测装置/Inertial Measurement Unit),测定加速度、陀螺仪、地磁气,确认AR.Drone的方向
■通过红外线测距传感器避难与障碍物发生冲突

▲自定义AGUL

▲AGUL测试飞行的样子


使用无人机(Drone)制作广阔范围的地理数据



在日本国土交通局的新世代社会基础设施机器人现场检测对象技术中无人机被采用。(2014年7月10日)
桥梁维持管理领域[利用与3DVR连接的自主飞行型UAV的建筑物调查系统]
中标项目

▲自定义自主无人机
▲3DVR和自主无人机的连接
通过红外线深度传感器进行UC-win/Road驾驶操作的系统
在Kinect前面像操舵操作一样进行UC-win/Road驾驶操作的系统。
Kinect™将检测驾驶员双手的位置信息并转换为车辆的操舵、油门和刹车。
通过红外线深度传感器进行车辆控制和驾驶操作的示意
在Kinect前面像操舵操作一样进行UC-win/Road驾驶操作的系统。Kinect™将检测驾驶员双手的位置信息转换为车辆的操舵、油门和刹车。

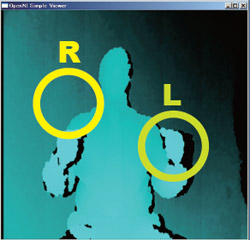
▲方向盘操作(右转弯・左转弯)
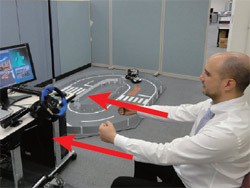
▲油门操作
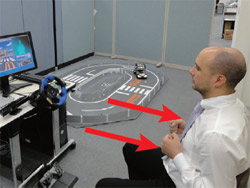
▲刹车操作
●UC-win/Road Air Driving 应用技术
无需控制设备实现细致、高精度的驾驶操作。
骨架识别
红外线深度感应器通过距离信息检测出同一物体来识别人体特征。采取特定的举动时会进行校正识别骨架结构。

▲Kinect(TM)传感器
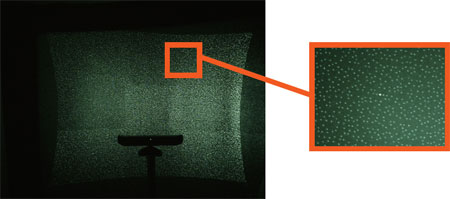
▲红外线激光的情况
方向盘的方向以及转向量的检测
从出拳的左右手的位置来检测出左转、右转的方向以及角度的模拟值。检测量从绿色到红色的变化显示在变化棒上。越接近红色说明越受到控制。
油门、刹车的踩踏量测出
从脚趾的位置开始检测踩踏量模拟值
●油门 : 检测结果显示向上。
●刹车 : 检测结果显示向下。

▲前进

▲右转弯:向右幅度越大
右方的红色条形就会越多。
●使用红外线深度感应器的多集群数字标牌系统
多画面6K显示器和利用红外线深度传感器的互动操作(双向)数字标牌系统。
利用手势、动作可进行直观操作。
手势界面与运动捕捉功能可以互动地操作。输入使用Xtion PRO红外线深度传感器。通过直观的操作,与传统的互动标牌相比较可以期待更高的集客率。我们也提供多集群系统与UC-win/Road的集群功能的实时VR模拟,使用了超级云®的CG渲染服务等相关的服务。

▲6K数字标牌ジAirDriving
(东京Gameshow2011)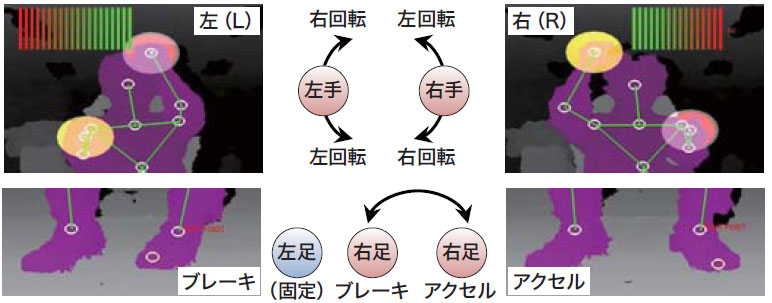
▲AirDriving 界面

新的解决方案服务[超级计算机®]
运用超级计算机的高级演算性能,提供大规模的分析、模拟、CG渲染等服务
■ UC-win/Road・CG动画服务
[超级计算机® CG动画服务]是用POV-Ray提供制作成的高度精细的视频文件。通过使用超级计算机可以制作更加高度精细的视频文件。由于使用了POV-Ray,在UC-win/Road导出后脚本文件可以用editor等进行修正。
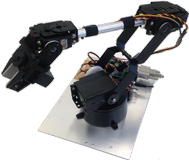
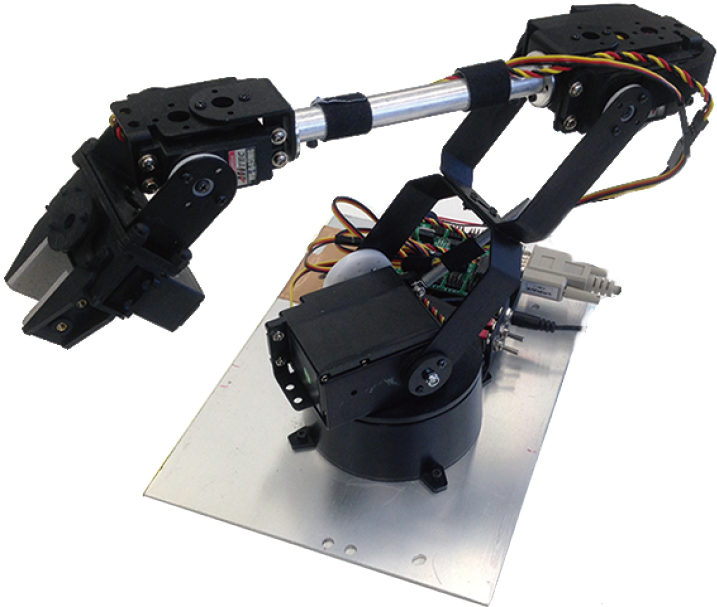
●UC-win/Road for Robot Arm
虚拟空间与现实空间里的机器臂相结合做出动作。
与VR相结合的模型车自主行驶系统
Lily Car是缩小的自主行驶模型车,将实车的举动在较小空间内模拟,对开发小型的自动驾驶车非常地有帮助。
让车在实现制定路径的实验场地上自主行驶。可以随时切换手动模式个自动驾驶模式,与电脑的控制界面和Aurelo系统连接,可以取得各车辆的位置与方向信息。并且,对车发送适当的指令的话就可以让它在所选的路径里行驶。
Lily Car系统结构
・1/10 RC Car的机体外壳 ・引擎 ・方向盘引擎
・碰撞判定所使用的红外线感知器 ・车辆追踪用AR标记
・PC远程操作时用作交流和控制的无线模块
・管理整个系统的主控制器





-
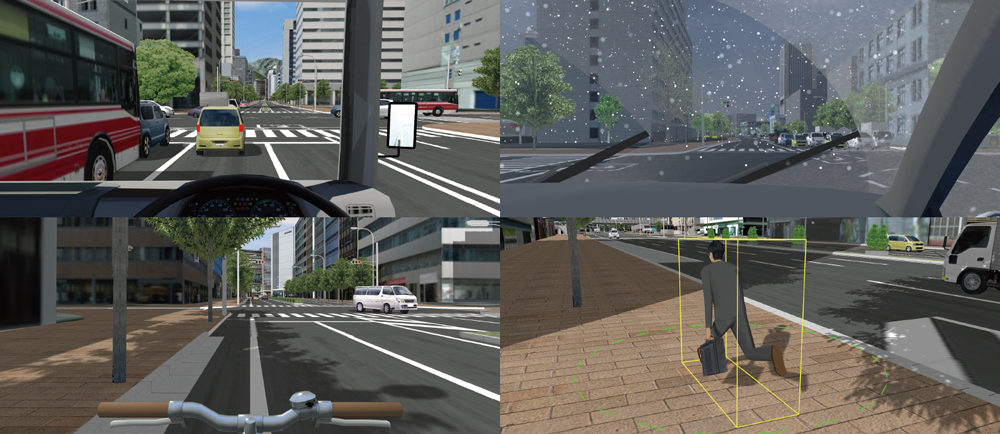
MR/AR
-
- 利用UC-win/Road可以在3D立体显示中使用实时模拟信息。
- 无需偏光眼镜虽然有些取决于对象物大小,但很多可以结合各种信息使用,如KIOSK(广告塔) (实时运行的数据打造对象物强烈的视觉效果)
●MR : Mixed Reality - 混合现实 ●AR : Augmented Reality - 增强现实
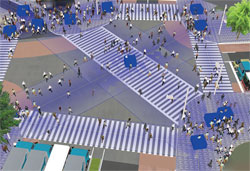
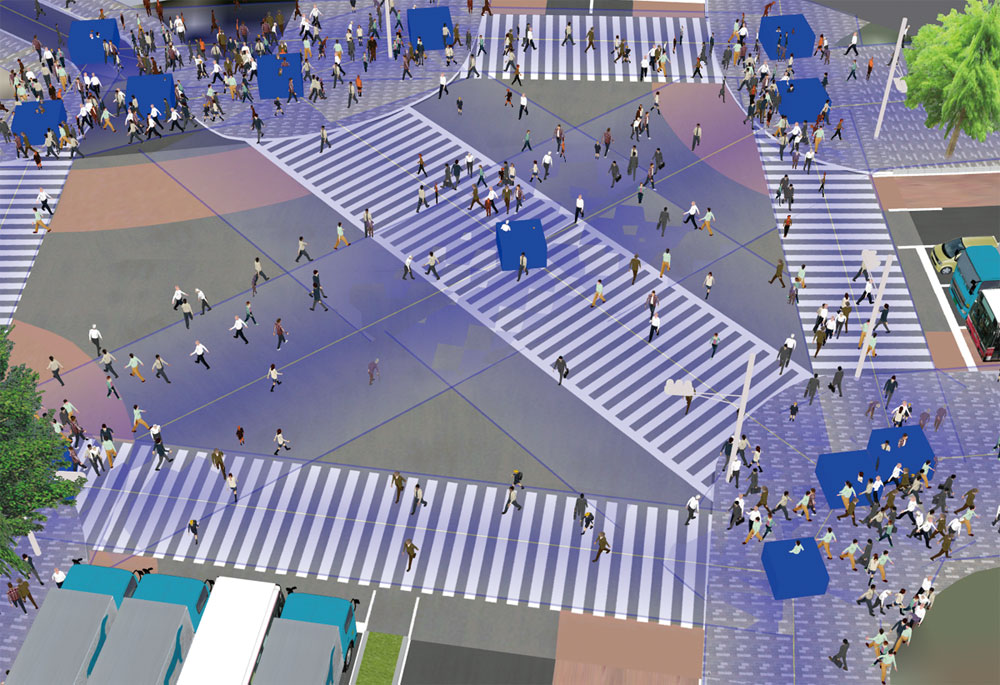
渋谷交叉口群集模型与交互性设备 Development of Linking System for VR and Interactive Devices
Mr. Taro Narahara (哈佛大学大学院、美国)
将实际捕捉到的人物动作导入模型,可逼真地在UC-win/Road中进行项目再现。
此次,通过将该技术与我公司的插件共同开发,实现模拟和UC-win/Road的实时连接,Mr. Narahara对实时的交互式结构进行了说明。


▲IVR展会

▲第3届国际VR研讨会发表
3D立体系统 裸眼立体映像系统
3D 立体视图系统构筑例
无需眼镜的立体映像。实现西洋镜和立体映像的合成。
■什么是3D-B-Vision?
3D-B-Vision是指混合现实/增强现实(Mixed Reality, MR/Augmented Reality.AR),硬件系统。
利用在现实空间(物理空间)重叠显示数字信息的功能AR正在成为普遍的技术。3D-B-Vision正是实现了数字信息的3D立体CG的格式的显示。该信息能够显示在建筑模型以及模型等其他的物理对象物上。系统只需将2个小型投影仪按照两眼距离隔开设置即可实现3D立 体显示效果,不需要专门的眼镜。用户可以通过透明视窗确认对象物体。并且使用overhead的 silver screen设置3D立体图片并立刻确认。3D-B-Vision的立体投影,结合汽车、步行者和其他动作的对象物可以实现高效的演示。


▲普通的3D立体系统图
■优点

▲开发 :(有)石川光学造形研究所http://www.holoart.co.jp/
UC-win/Road 视线追踪系统
可以测量视线信息数据的穿戴设备。
使用UC-win/Road可以与VR空间内的驾驶模拟进行连接。
※需要另外定制。


Eye Tracking Glasses Option
可将人的视线[可视化]的视线追踪眼镜。

采样率 60Hz or 30Hz 校准 0, 1, 3 点(3种) 录音麦 ○ 场景摄像机(解析度) 1280x960p @24 fps
960x720p @30 fps场景摄像机记录角度 横80°纵60° 连续记录时间 (PC) 2小时 (Galaxy) 2小时 记录容量 (PC) 18小时 (Galaxy) 20小时 重量(眼镜) 47g 重量(Galaxy) 176g 尺寸( 眼镜) 135 x 69 x 23 mm 注视点精确度 0.5° 组成部件
・60Hz binocular Eye Tracking Glasses with HD scene camera
・ETG专用眼镜框(3D)
・Row数据访问SDK
・录音软件iView的授权
・VRPN Server
Eye Tracking HMD based on HTC Vive Option
SMI公司以HTC Vive为基础所制作的,向250Hz的高性能模型附加视线信息。

视线追踪 追踪 250Hz(双眼) 追踪范围 最大视野(110°) 视点精度 0.2° 校准 1,3,5 点(3种) 测量数据 屏幕上的注视点
(左、右、双眼)瞳孔间距(IPD) 注视基准点、注视轨迹
头戴设备硬件 HTC Vive
耳机&播放器的连接
(连接前不需要调整)、USB头部单元 视线追踪
模块部分 55g
操作设备系统要求 HTC Vive认证的电脑 OS Windows10 64bit 组成部件
・HTC公司的Vive VR眼镜/附属部件
・Binocular Eye Tracking at 250 Hz(内置模块)
・Row数据访问SDK
・Unity专用插件、WorldViz Vizard、Unreal Engine
・录音软件iView的授权
・VRPN Server
※上述的规格在产品改善的同时有可能发生变更,如果没有及时在网上公布,请见谅。
开发: SMI公司 https://www.smivision.com/
HMD系统 头戴式显示系统
使用Oculus Rift输出3D画面
拥有非常广阔的视野,内藏感知器实现了头部跟踪
■Oculus Rift
美国的Oculus VR公司所提供的开发套件,拥有内藏感知器和广阔视野的3D画面输出功能的头戴式显示器(HMD:Head Mounted Display)。并且,与以前的HMD相比较价格更加地实惠。
■显示
Oculus Rift作为HMD,它的视野宽度值得称赞。在鱼眼模式的屏幕上,虽然戴上的时候液晶本身是平面的,但因为此设备,使得观看时误以为眼前所呈现的是半球状的投影屏幕。再加上左右眼的视觉差所生成的立体视觉,增加了VR空间内的沉浸感。以前的HMD运用在光学系统上下功夫来抑制眼镜片的弯曲的方法来生成正常的画面。Oculus Rift是将画面资源进行渲染使得弯曲的镜片也能正常地观看。
收集Oculus Rift的感知数据,结合用户的头部运动便可以追踪UC-win/Road里的视点。也可以通过矫正失真图像的设置来适应镜片。

▲Oculus Rift DK2
▲Oculus Plugin的立体影像


-
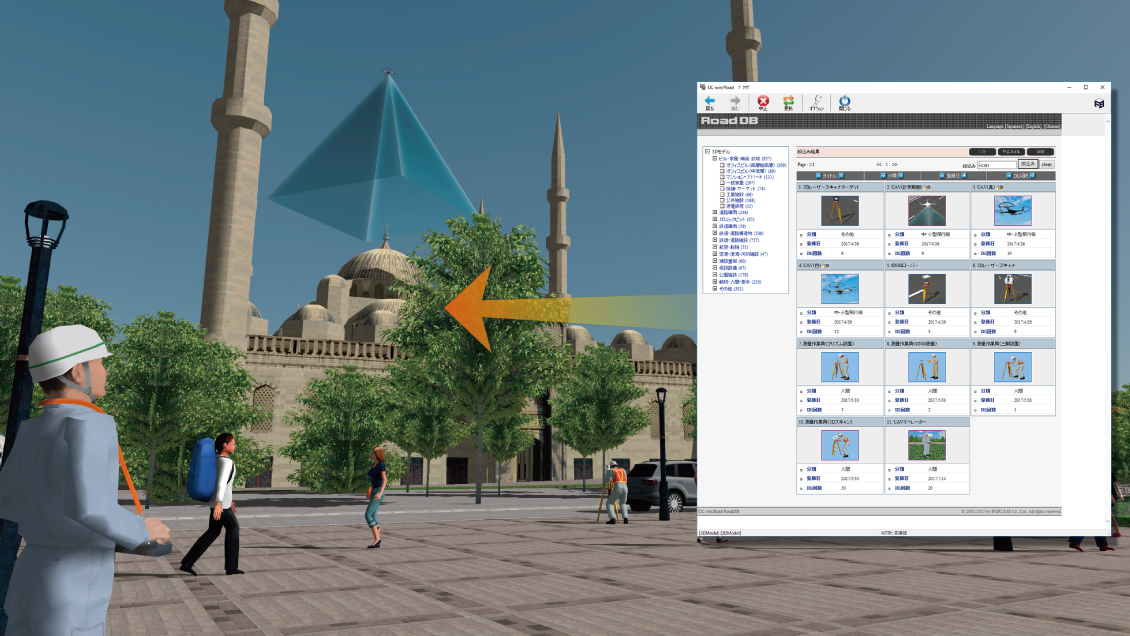
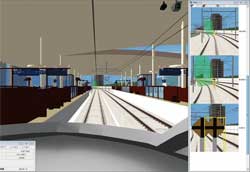
UC-win/Road 模型VR系统
-
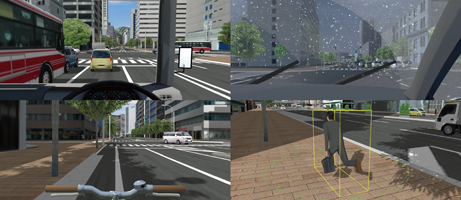
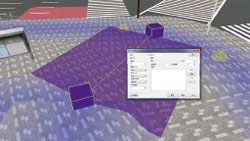
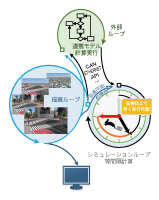
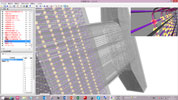
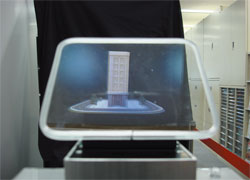
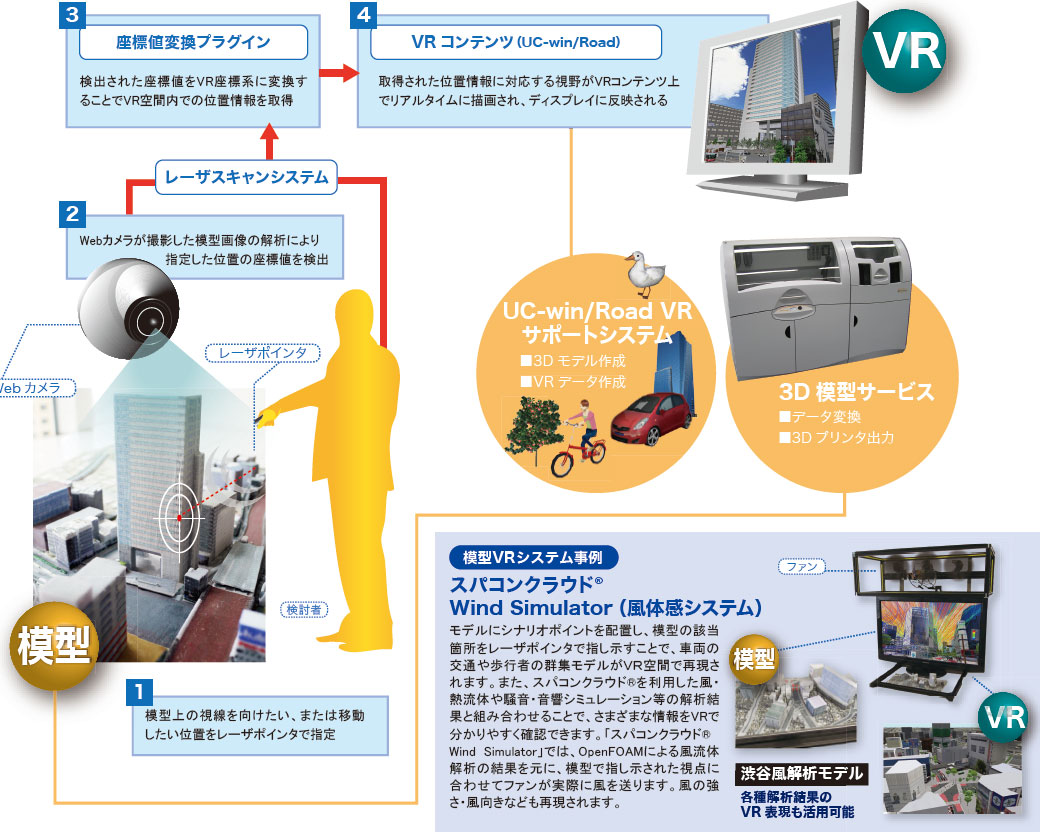
[UC-win/Road模型VR系统]由W16成员之一的大坂大学大学院福田知弘准教授的想法和技术协力开发而成。将模型和VR的视野信息连接,通过提供一体化操作环境技术,将双方的长处结合形成的新型模拟演示系统。在专址性和知识水平方面,对于各类相关人员可通俗易懂地传递信息,高效推进规划讨论和共识达成。
详情 >> UC-win/Road模型VR系统(Up&Coming '11 春季刊)
技术协力: 大阪大学环境资源工学专攻、福田知弘 副教授
■模型和VR长处结合的讨论工具
VR的长处:高度的灵活性和表现力,在交通流的表现、天气条件的变更等可进行模型无法实现的各类讨论。
模型的长处:距离、规模等在规划整体把握方面,模型更有直感。并且,多人可同时从任意视点进行讨论,便于一次性把握城市整体,讨论者可以直接接触也是模型的长处所在。
■模型上指定希望讨论的视点在VR上描绘
与VR单体相比更加直观,规划讨论时更加容易操作。使用激光指针通过在模型上指明希望讨论的视点,可在VR空间内移动及变更视线方向。系统由模型、Web照相机、激光指针、VR软件[UC-win/Road],显示VR空间的播放器构成,通过激光指针的操作检测出位置,并将检出到的信息传递给UC-win/Road最终反应到VR空间。
■[中目黑安全安心地图]模型VR系统在展示厅中展示
使用了FORUM8本社所在地中目黑地区模型的提案系统。模型和VR—体化作为[地域的安全安心地图],还可确认地下的基础设施治理状况、大楼内部空间等,可用于城市二次开发、城市治理中达成共识等目的。
■系统提案及预算
F0RUM8根据客户的需求准备了UC-win/Road模型VR系统的提案及预算。此外,利用UC-win/Road支援系统,还可根据客户的需求制作3DVR模拟数据。制作的VR数据如果应用于[3D模型服务],UC-win/Road的VR数据可通过3D打印机段时间内输出实物模型,由此可高效地构筑模型VR系统。
报价示例:[中目黑安全安心地图]模型VR系统 使用FORUM8本社所在地中目黑地区模型的提案系统。模型和VR—体化作为[地域的安全安心地图],还可确认地下的基础设施治理状况、大楼内部空间等,可用于城市二次开发、城市治理中达成共识等目的。
■VR数据制作 : 约18万元 ■3D模型制作 : 约23万元
※包含购买ARToolKit、Web照相机、激光指针、台式电脑、42寸显示器、UC-win/Road Advanced 1套、UC-win/Road二次开发、技术咨询等费用
总计 约90万元

▲[中目黑安全安心地图]

▲中目黑车站前

▲目黑银座商店街
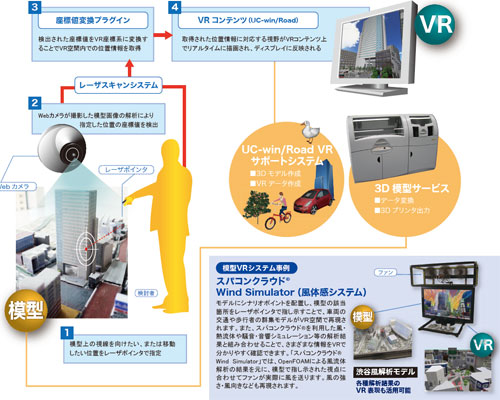
▲系统组成概要



-
3D投影映射
-
- 位置:屋外、环境光较少的暗处、投影、设置都不会对交通、近邻产生影响的私有用地
- 投影对象:塔状建筑物,简单的立方体构成
- 建筑物尺寸:W11m x D6m x H20m
- 建筑物材质:砖(茶色/非光泽)
- 投影位置数:最大从2个位置投影
- 投影距离:约15m(A附近)约40m(B远处)
- 作品长度约3分钟,映像、音响(附选曲、MA)
- 映像音响器材租赁期间3天 (准备1天/正式使用2天)
- 含现场测试
- 含企划(进行制作管理)
- 含器材搬运、设营、调整
- 含操作人员、映像音响技术人员
- 外地交通费、住宿费另计
- 不含架台制作费、吊车利用费等
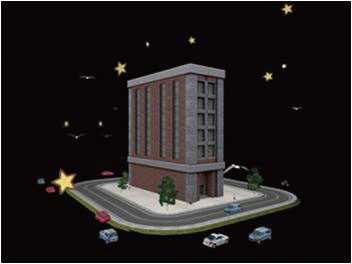
- 实现了3D模型周围全体映射,超越了全息图的立体显示装置。 <2016年3月30日 最新信息>
- Projection Mapping Table <Up&Coming No.108 '15 新年号 [3D相关新闻]>
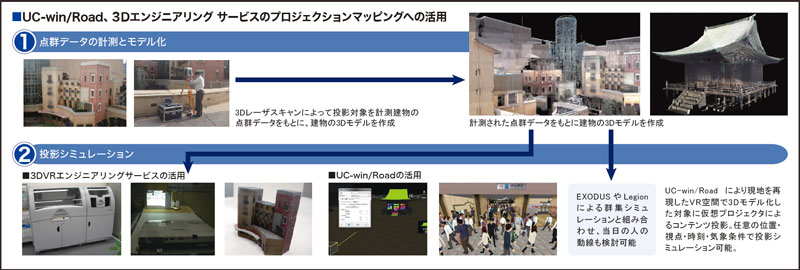
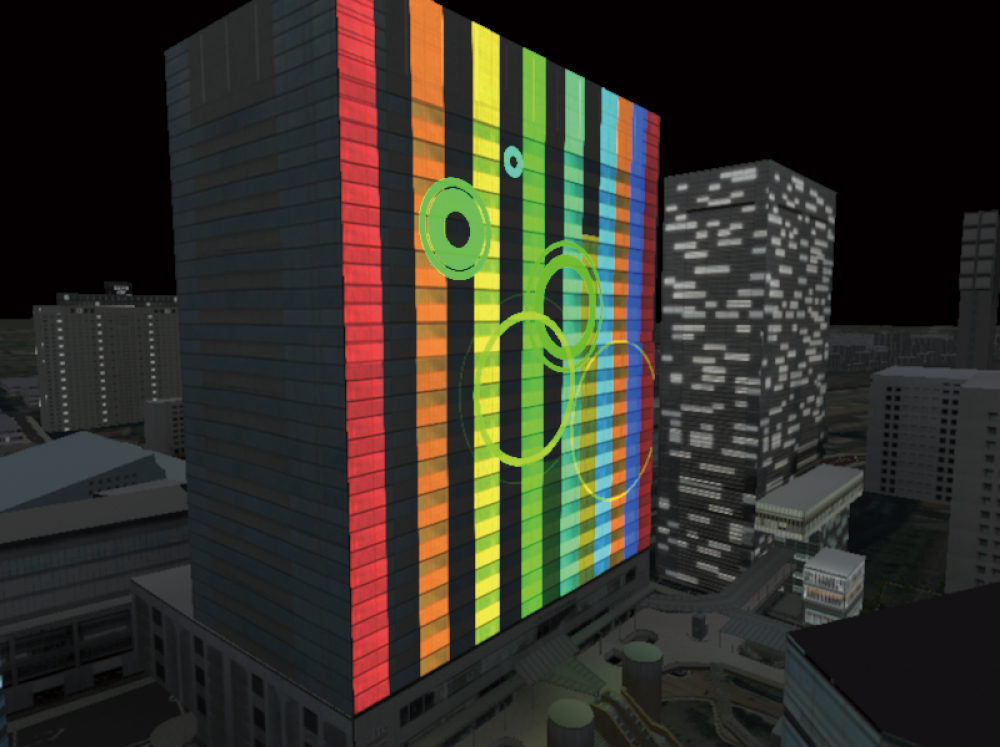
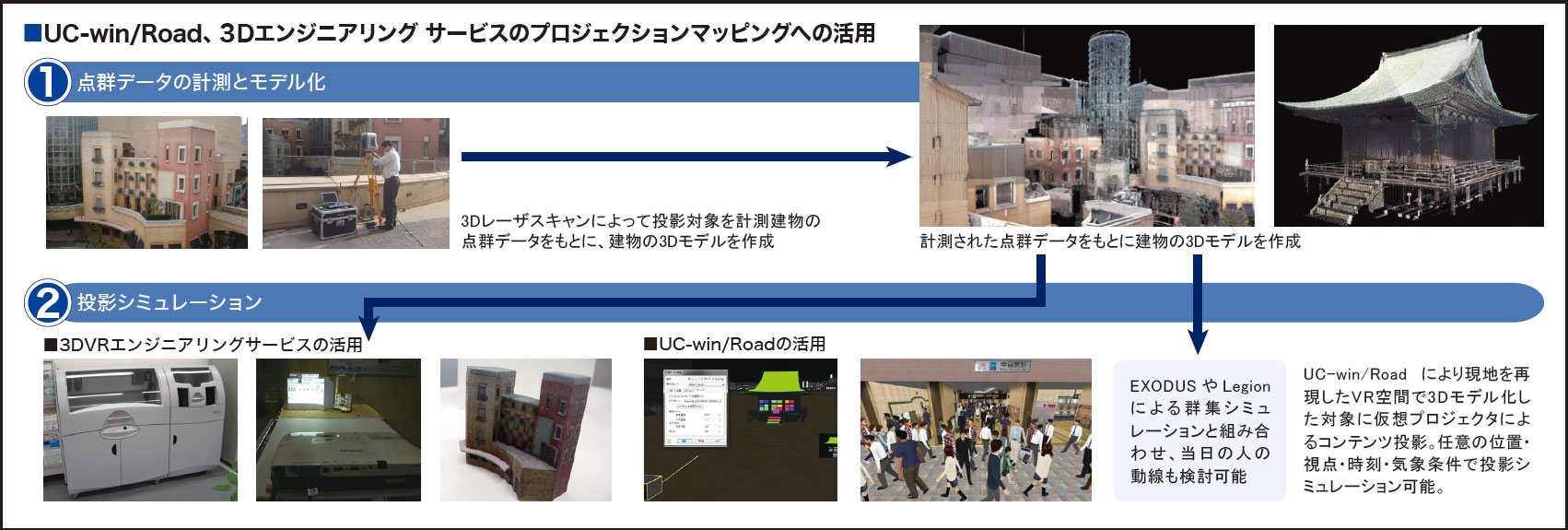
建筑空间和映像的融合及应用VR的投影讨论
FORUM8公司提供三维投影映射等利用三维数据以及映像的最先进的空间表现服务。
协力 : 一般财团法人 最先端表现技术利用推进协会
3D投影映射 <Up&Coming No.96 '12 春季刊>
3D投影映射(其2) <Up&Coming No.97 '12 夏季刊>


▲锦带桥投影映射[时空的桥梁](2015.5.30)

▲芝浦工业大学里实施的投影映射
(2015.9.10)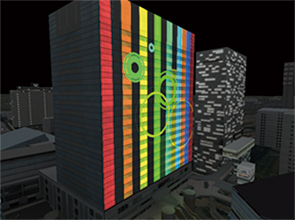
▲利用VR数据
进行投影映射影像确认
应用VR的投影模拟
通过应用UC-win/Road、3D工程服务的投影模拟,可事前确认比例尺模型、VR数据的效果。对内容的讨论、确认、会晤、面向甲方的说明,还可利用于活动的事前、事后展示宣传。
模型投影计划示例
计划案例

▲2台组成
模型投影计划一览(2D,3D内容)
※音响费用:包含模型投影中音响器材和音响内容的合计约6万人民币。
※包含3D动画内容+音响
器材组成 投影仪1台 投影仪2台 10000流明
影像投影仪30万元 42万元 20000流明
影像投影仪40万元 48万元
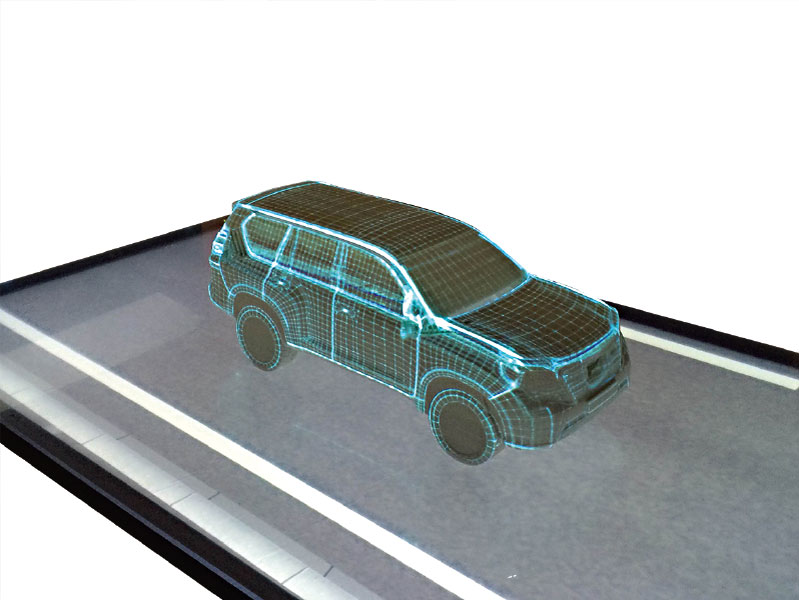
Projection Mapping Table
利用UC-win/Road和3D模型,进行周围全体映射的设计模拟系统。
案例:格子质地的映射事例和实车质地的映射案例


▲格子材质


▲真实汽车的材质


-
IM&VR
-
BIM/CIM在建筑、土木中追求将各类信息综合到模型,并对其信息制作、管理和 应用。从设计、施工、维护管理作为1个模型来考虑,除2D3D图纸制作外,包含 材料规格、数量、概算施工费、管理信息等,通过将所有信息统一管理,可对建筑 物、结构物的生命周期所需的全部信息进行连续设计和表现。
此外,通过对各类解析、VR的解析结果可视化模拟等在内,作为土木建筑行业全新的商业模式, FORUM8致力于『IM&VR解决方案』的推广。
详情 >>IM&VR
-
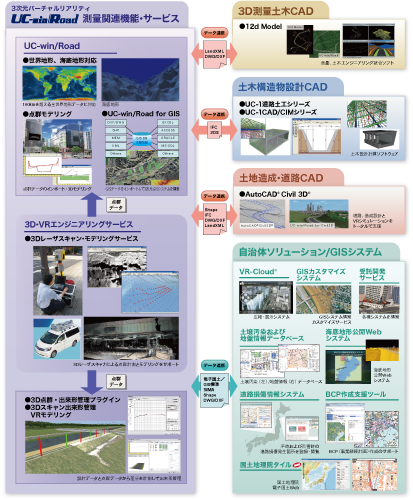
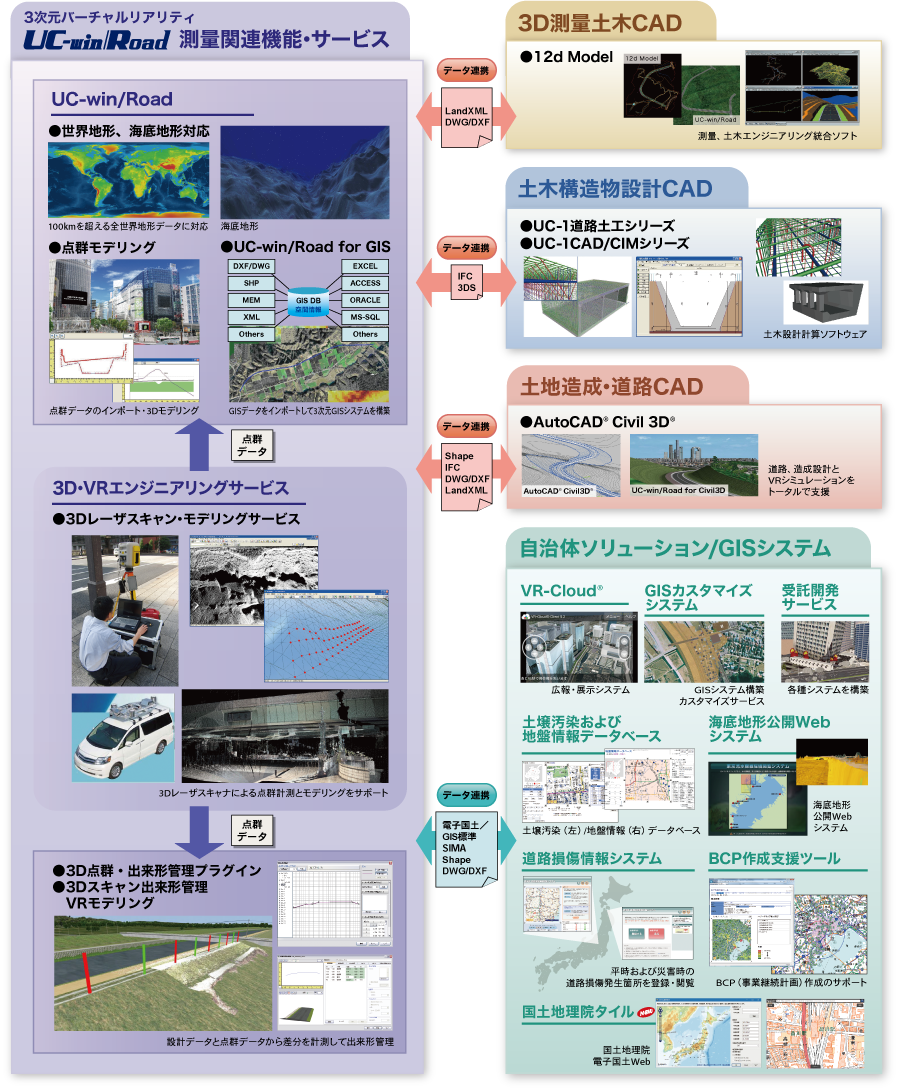
FORUM8 测量解决方案
-
GIS/3D镭射扫描/3D测量土木综合解决方案
我们提供使用3D激光扫描进行点云测量和在UC-win/Road中运用点云数据制作VR模型等服务。我们提供3D测量CAD/土木构造物设计CAD与VR进行数据交换,GIS和VR连接进行系统构筑等综合测量解决方案。
-
UC-win/Road 驾驶模拟器
-
- 可通过UC-win/Road制作自定义的驾驶环境
- 提供标准插件包
- 提供标准VR数据、支持场景自定义
- 使用Visual Option Tools重现各种环境
- 车身硬件通过量产OEM实现低价
- 通过客制化满足高级仿真需求
在理想的驾驶环境中,可以重复生成和复制各种驾驶环境。
近年来,驾驶模拟器已广泛应用于车辆系统开发、ITS交通系统研究、驾驶员、汽车、道路和交通的交互研究。
-
UC-win/Road 驾驶模拟器
-
- 可通过UC-win/Road制作自定义的驾驶环境
- 提供标准插件包
- 提供标准VR数据、支持场景自定义
- 使用Visual Option Tools重现各种环境
- 车身硬件通过量产OEM实现低价
- 通过客制化满足高级仿真需求
在理想的驾驶环境中,可以重复生成和复制各种驾驶环境。
近年来,驾驶模拟器已广泛应用于车辆系统开发、ITS交通系统研究、驾驶员、汽车、道路和交通的交互研究。
产品价格
-
软件价格
-
■软件价格
产品名 价格 UC-win/Road Ver.17 Ultimate 113,000元 UC-win/Road Ver.17 Driving Sim 72,000元 UC-win/Road Ver.17 Advanced 58,000元 UC-win/Road Ver.17 Standard 39,000元 UC-win/Road Ver.17 CIM Lite 31,000元 UC-win/Road Ver.17 Multi User Client Version 7,000元 UC-win/Road Ver.17 Presentation Version 3,000元 UC-win/Road Ver.17 Cluster Client Version 3,000元 UC-win/Road Ver.17 Free Viewer Version 免费 VR-Cloud® 免费 glTF Viewer 免费 ■浮动授权价格
额外支付定价的40%,可以在任意地点和任意PC使用。
产品名 价格 UC-win/Road Ver.17 Ultimate 45,200元 UC-win/Road Ver.17 Driving Sim 28,800元 UC-win/Road Ver.17 Advanced 23,200元 UC-win/Road Ver.17 Standard 15,600元 UC-win/Road Ver.17 CIM Lite 12,400元 UC-win/Road Ver.17 Multi User Client Version 2,800元 UC-win/Road Ver.17 Presentation Version 1,200元 UC-win/Road Ver.17 Cluster Client Version 1,200元 UC-win/Road Ver.17 Free Viewer Version 免费 VR-Cloud® 免费 glTF Viewer 免费
>>点击查看授权详情
升级
-
升级价格
-
版本名称 对象产品 价格/类别 备注 UC-win/Road Ver.17 Ultimate UC-win/Road Ver.17 Driving Sim 49,000元 升级
- UC-win/Road Ver.17 Ultimate UC-win/Road Ver.17 Advanced 66,000元 升级
- UC-win/Road Ver.17 Driving Sim UC-win/Road Ver.17 Standard 39,000元 升级
- UC-win/Road Ver.17 Advanced UC-win/Road Ver.17 Standard 22,000元 升级
- 订阅价格
-
订阅价格
-
■服务内容
・免费提供版本升级 ・电话技术咨询服务
・咨询服务(电子邮件、FAX) ・下载服务 ・维护信息传送服务
产品名 第1年订阅费用 往后每年 订阅(UC-win/Road Ver.17 Ultimate) 免费 33,900元 订阅(UC-win/Road Ver.17 Driving Sim) 21,600元 订阅(UC-win/Road Ver.17 Advanced) 17,400元 订阅(UC-win/Road Ver.17 Standard) 15,600元 订阅(UC-win/Road Ver.17 CIM Lite) 12,400元 订阅(UC-win/Road Ver.17 Multi User Client Version) 2,800元 订阅(UC-win/Road Ver.17 Presentation Version) 1,500元 订阅(UC-win/Road Ver.17 Cluster Client Version) 1,500元 订阅(UC-win/Road Ver.17 Ultimate 浮动授权) 47,460元 订阅(UC-win/Road Ver.17 Driving Sim 浮动授权) 30,240元 订阅(UC-win/Road Ver.17 Advanced 浮动授权) 24,360元 订阅(UC-win/Road Ver.17 Standard 浮动授权) 21,840元 订阅(UC-win/Road Ver.17 CIM Lite 浮动授权) 17,360元 订阅(UC-win/Road Ver.17 Multi User Client Version 浮动授权) 3,920元 订阅(UC-win/Road Ver.17 Presentation Version 浮动授权) 2,100元 订阅(UC-win/Road Ver.17 Cluster Client Version 浮动授权) 2,100元
租赁授权/浮动租赁授权价格
■租赁授权:短期使用,价格低廉。
■浮动租赁授权:通过网络认证,可以在任意地点、任意电脑使用。
■临时租赁授权:可以在现有产品授权的基础上临时增加授权数量。以租赁许可期限(1到3个月)为单位进行授权,并根据使用记录进行收费。提前预约,可享受租赁授权15%的价格优惠。可以通过用户信息页面申请。
※租赁授权或浮动租赁授权开始后无法更改期限,如需延长期限需要再次申请。
-
租赁授权/浮动租赁授权
-
●软件价格
■租赁授权
产品名 2个月 3个月 6个月 UC-win/Road Ver.17 Ultimate 50,850元 59,890元 73,450元 UC-win/Road Ver.17 Driving Sim 32,400元 38,160元 46,800元 UC-win/Road Ver.17 Advanced 26,100元 30,740元 37,700元 UC-win/Road Ver.17 Standard 17,550元 20,670元 25,350元 UC-win/Road Ver.17 CIM Lite 13,950元 16,430元 20,150元 UC-win/Road Ver.17
Multi User Client Version3,150元 3,710元 4,550元 UC-win/Road Ver.17
Presentation Version1,710元 2,010元 2,490元 UC-win/Road Ver.17
Cluster Client Version1,710元 2,010元 2,490元 ■浮动租赁授权
产品名 2个月 3个月 6个月 UC-win/Road Ver.17 Ultimate 84,750元 100,570元 124,300元 UC-win/Road Ver.17 Driving Sim 54,000元 64,080元 79,200元 UC-win/Road Ver.17 Advanced 43,500元 51,620元 63,800元 UC-win/Road Ver.17 Standard 29,250元 34,710元 42,900元 UC-win/Road Ver.17 CIM Lite 23,250元 27,590元 34,100元 UC-win/Road Ver.17
Multi User Client Version6,020元 7,140元 8,820元 UC-win/Road Ver.17
Presentation Version2,880元 3,420元 4,260元 UC-win/Road Ver.17
Cluster Client Version2,880元 3,420元 4,260元
●各种插件
■租赁授权
产品名 2个月 3个月 6个月 驾驶模拟器插件 9,900元 11,660元 14,300元 ECO驾驶插件 9,900元 11,660元 14,300元 重播插件 4,950元 5,830元 7,150元 LOG输出插件 9,900元 11,660元 14,300元 场景插件 4,950元 5,830元 7,150元 通信插件 9,900元 11,660元 14,300元 微观模拟播放器插件 9,900元 11,660元 14,300元 VR-Cloud®插件
(包含a3S SDK 服务器授权)9,900元 11,660元 14,300元 VR-Cloud®脚本插件
(VR-Cloud® SDK的功能)
※必备VR-Cloud®插件9,900元 11,660元 14,300元 VR-Cloud®collaboration 插件
※必备VR-Cloud®插件16,200元 19,080元 23,400元 点云建模插件 4,950元 5,830元 7,150元 Civil 3D插件 2,295元 2,700元 3,330元 EXODUS插件 9,900元 11,660元 14,300元 GIS插件 8,100元 9,540元 11,700元 InRoads插件 2,295元 2,700元 3,330元 OSCADY PRO插件 3,150元 3,710元 4,550元 xpswmm插件 Ver.2(for Tsunami) 9,900元 11,660元 14,300元 噪音模拟插件 9,900元 11,660元 14,300元 3D模型输出插件 2,448元 2,880元 3,552元 DWG工具插件 2,448元 2,880元 3,552元 IFC插件 2,295元 2,700元 3,330元 12d Model插件 2,448元 2,880元 3,552元 孟塞尔色系输出插件 6,750元 7,950元 9,750元 停车场模型读取插件 2,448元 2,880元 3,552元 免费浏览输出插件 2,295元 2,700元 3,330元 海啸插件 9,900元 11,660元 14,300元 OHPASS插件 16,200元 19,080元 23,400元 OSM插件 2,295元 2,700元 3,330元 在线地图读取插件 2,448元 2,880元 3,552元 Oculus Rift插件 1,710元 2,010元 2,490元 ■浮动租赁授权
产品名 2个月 3个月 6个月 驾驶模拟器插件 16,500元 19,580元 24,200元 ECO驾驶插件 16,500元 19,580元 24,200元 重播插件 8,250元 9,790元 12,100元 LOG输出插件 16,500元 19,580元 24,200元 场景插件 8,250元 9,790元 12,100元 通信插件 16,500元 19,580元 24,200元 微观模拟播放器插件 16,500元 19,580元 24,200元 VR-Cloud®插件
(包含a3S SDK 服务器授权)16,500元 19,580元 24,200元 VR-Cloud®脚本插件
(VR-Cloud® SDK的功能)
※必备VR-Cloud®插件16,500元 19,580元 24,200元 VR-Cloud®collaboration插件
※必备VR-Cloud®插件27,000元 32,040元 39,600元 点云建模插件 8,250元 9,790元 12,100元 Civil 3D插件 3,870元 4,590元 5,670元 EXODUS插件 16,500元 19,580元 24,200元 GIS插件 13,500元 16,020元 19,800元 InRoads插件 3,870元 4,590元 5,670元 OSCADY PRO插件 5,250元 6,230元 7,700元 xpswmm插件 Ver.2
(for Tsunami)16,500元 19,580元 24,200元 噪音模拟插件 16,500元 19,580元 24,200元 3D模型输出插件 4,128元 4,896元 6,048元 DWG工具插件 4,128元 4,896元 6,048元 IFC插件 3,870元 4,590元 5,670元 12d Model插件 4,128元 4,896元 6,048元 孟塞尔色系输出插件 11,250元 13,350元 16,500元 停车场模型读取插件 4,128元 4,896元 6,048元 免费浏览输出插件 3,870元 4,590元 5,670元 海啸插件 16,500元 19,580元 24,200元 OHPASS插件 27,000元 32,040元 39,600元 OSM插件 3,870元 4,590元 5,670元 在线地图读取插件 4,128元 4,896元 6,048元 Oculus Rift插件 2,880元 3,420元 4,260元
●单卖插件选项
■租赁授权
对象产品 2个月 3个月 6个月 运动平台插件・选项 25,200元 29,680元 36,400元 D-BOX插件・选项 23,400元 27,560元 33,800元 轮椅模拟器插件・选项 8,550元 10,070元 12,350元 摩托车模拟器插件・选项 5,850元 6,890元 8,450元 VR座椅接口插件・选项 8,550元 10,070元 12,350元 远端访问插件・选项 9,900元 11,660元 14,300元 实时模拟接口・选项 14,850元 17,490元 21,450元 HIL接口・选项 53,100元 62,540元 76,700元 RoboCar® 插件・选项 9,900元 11,660元 14,300元 Legion接口插件・选项 2,448元 2,880元 3,552元 超级计算机云® 流体分析接口插件・选项 9,900元 11,660元 14,300元 集群插件・选项 25,200元 29,680元 36,400元 3D点云・成形管理插件・选项 9,000元 10,600元 13,000元 泥石流模拟插件・选项 9,900元 11,660元 14,300元 F8Kinect插件・选项 6,750元 7,950元 9,750元 照片处理扩展插件・选项 6,750元 7,950元 9,750元 Aimsun接口插件・选项 8,550元 10,070元 12,350元 cycleStreet接口插件・选项 3,150元 3,710元 4,550元 Rhino®插件・选项 3,060元 3,600元 4,440元 驾驶诊断插件・选项 11,700元 13,780元 16,900元 转向扭矩控制・选项 26,550元 31,270元 38,350元 SfM (Structure from Motion) 插件・选项 14,850元 17,490元 21,450元 激光传感器・选项 53,100元 62,540元 76,700元 UAV插件・选项 8,550元 10,070元 12,350元 HUD(虚拟显示屏)插件・选项 8,550元 10,070元 12,350元 照相机传感器基本插件・选项 23,400元 27,560元 33,800元 照相机传感器接口・选项 58,080元 68,640元 84,480元 DS项目转换插件・选项 11,700元 13,780元 16,900元 仪表盘显示(独立的监视器显示)插件・选项 8,550元 10,070元 12,350元 FOVE插件・选项 8,550元 10,070元 12,350元 HTC VIVE插件・选项 8,550元 10,070元 12,350元 Mindwave接口插件・选项 8,550元 10,070元 12,350元 OpenFlight插件・选项 11,700元 13,780元 16,900元 环境评估插件・选项 10,350元 12,190元 14,950元 Log数据UDP受信・选项 8,550元 10,070元 12,350元 CAN信号接口・选项 26,550元 31,270元 38,350元 A/D board接口・选项 53,100元 62,540元 76,700元 Simulink接口插件・选项 11,700元 13,780元 16,900元 VISSIM接口插件・选项 8,550元 10,070元 12,350元 视线计测插件・选项 8,550元 10,070元 12,350元 对象物检测插件・选项 8,550元 10,070元 12,350元 4D模拟编辑插件・选项 5,850元 6,890元 8,450元 地震模拟器插件・选项 11,700元 13,780元 16,900元 ■浮动租赁授权
产品名 2个月 3个月 6个月 运动平台插件・选项 42,000元 49,840元 61,600元 D-BOX插件・选项 39,000元 46,280元 57,200元 轮椅模拟器插件・选项 14,250元 16,910元 20,900元 摩托车模拟器插件・选项 9,750元 11,570元 14,300元 VR座椅接口插件・选项 14,250元 16,910元 20,900元 远端访问插件・选项 16,500元 19,580元 24,200元 模拟实时接口・选项 24,750元 29,370元 36,300元 HIL接口・选项 88,500元 105,020元 129,800元 RoboCar®插件・选项 16,500元 19,580元 24,200元 Legion接口插件・选项 4,128元 4,896元 6,048元 超级计算机云® 流体分析接口插件・选项 16,500元 19,580元 24,200元 集群插件・选项 42,000元 49,840元 61,600元 3D点云成形管理插件・选项 15,000元 17,800元 22,000元 泥石流模拟插件・选项 16,500元 19,580元 24,200元 F8Kinect插件・选项 11,250元 13,350元 16,500元 照片处理扩展插件・选项 11,250元 13,350元 16,500元 Aimsun接口插件・选项 14,250元 16,910元 20,900元 cycleStreet接口插件・选项 5,250元 6,230元 7,700元 Rhino®插件・选项 5,160元 6,120元 7,560元 驾驶诊断插件・选项 19,500元 23,140元 28,600元 转向扭矩控制・选项 44,250元 52,510元 64,900元 SfM (Structure from Motion) 插件・选项 24,750元 29,370元 36,300元 激光传感器・选项 88,500元 105,020元 129,800元 UAV插件・选项 14,250元 16,910元 20,900元 HUD(虚拟显示屏)插件・选项 14,250元 16,910元 20,900元 照相机传感器基本插件・选项 39,000元 46,280元 57,200元 照相机传感器接口・选项 97,680元 116,160元 142,560元 DS项目变换插件・选项 19,500元 23,140元 28,600元 仪表盘显示(独立的监视器显示)插件・选项 14,250元 16,910元 20,900元 FOVE插件・选项 14,250元 16,910元 20,900元 HTC VIVE插件・选项 14,250元 16,910元 20,900元 Mindwave接口插件・选项 14,250元 16,910元 20,900元 OpenFlight插件・选项 19,500元 23,140元 28,600元 环境评估插件・选项 17,250元 20,470元 25,300元 Log数据UDP受信・选项 14,250元 16,910元 20,900元 CAN信号接口・选项 44,250元 52,510元 64,900元 A/D board接口・选项 88,500元 105,020元 129,800元 Simulink接口插件・选项 19,500元 23,140元 28,600元 VISSIM接口插件・选项 14,250元 16,910元 20,900元 视线计测插件・选项 14,250元 16,910元 20,900元 对象物检测插件・选项 14,250元 16,910元 20,900元 4D模拟编辑插件・选项 9,750元 11,570元 14,300元 地震模拟器插件・选项 19,500元 23,140元 28,600元
●相关产品
■租赁授权
产品名 2个月 3个月 6个月 VR-Cloud® Flash Version 9,900元 11,660元 14,300元 UC-win/Road SDK 9,900元 11,660元 14,300元 UC-win/Road Education Version 1,632元 1,920元 2,368元 UC-win/Road Web Viewer 11,250元 13,250元 16,250元 UC-win/Road 数据转换工具 4,050元 4,770元 5,850元 UC-win/Road数据转换工具 for APS-Win 4,950元 5,830元 7,150元 ■浮动租赁授权
产品名 2个月 3个月 6个月 VR-Cloud® Flash Version 16,500元 19,580元 24,200元 UC-win/Road SDK 16,500元 19,580元 24,200元 UC-win/Road Education Version 2,752元 3,264元 4,032元 UC-win/Road Web Viewer 18,750元 22,250元 27,500元 UC-win/Road 数据转换工具 6,750元 8,010元 9,900元 UC-win/Road数据转换工具 for APS-Win 8,250元 9,790元 12,100元 插件/对应表
-
插件/对应表
-
插件名称 Ultimate
113,000Driving Sim
72,000Advanced
58,000Standard
39,000CIM Lite
31,000价格 驾驶模拟器插件
(包含SensoDrive Simulator插件)● ● - - - 22,000元 ECO驾驶插件 ● ● - - - 22,000元 重播插件 ● ● - - - 11,000元 LOG输出插件 ● ● - - - 22,000元 场景插件 ● ● ● - - 11,000元 通信插件 ● ● ● - - 22,000元 微观模拟播放器插件 ● ● ● - - 22,000元 停车场模型导入插件 ● ● ● - - 5,200元 VR-Cloud®插件
(包含a3S SDK服务器授权)● ● ● - - 22,000元 VR-Cloud®脚本插件
(VR-Cloud® SDK的功能)
※必备VR-Cloud®插件● ● ● - - 22,000元 VR-Cloud®collaboration插件
※必备VR-Cloud®插件● ● ● - - 36,000元 点云模型插件 ● - ● - - 11,000元 Civil 3D插件 ● - ● - - 4,900元 EXODUS插件 ● - ● - - 22,000元 GIS插件 ● - ● - - 18,000元 InRoads插件 ● - ● - - 4,900元 OSCADY PRO插件 ● - ● - - 7,700元 xpswmm插件 Ver.2 (for Tsunami) ● - ● - - 22,000元 噪音模拟插件 ● - ● - - 22,000元 3D模型输出插件 ● - ● ● ● 5,200元 DWG工具插件
※必备3D模型输出插件● - ● ● ● 5,200元 IFC插件 ● - ● ● ● 5,200元 12d Model插件 ● - - - - 4,900元 孟塞尔色系输出插件 ● - - - - 15,000元 免费浏览输出插件 ● - - - - 4,900元 海啸插件 ● - - - - 22,000元 OHPASS插件 ● - - - - 36,000元 OSM插件 ● - ● ● ● 4,900元 在线地图读取插件 ● - ● ● ● 5,200元 Oculus Rift插件 ● - - - - 3,300元 插件名 Ultimate
113,000Driving Sim
72,000Advanced
58,000Standard
39,000CIM Lite
31,000价格
单卖插件选项
-
单卖插件选项
-
单卖插件选项名 价格 运动平台插件・选项(系统选项) ※4 56,000元 D-BOX插件・选项 52,000元 轮椅模拟器插件・选项 NEW! 19,000元 摩托车模拟器插件・选项 NEW! 13,000元 VR座椅接口插件・选项 19,000元 运程访问插件・选项 22,000元 模拟实时接口选项 33,000元 HIL接口选项 ※4 118,000元 RoboCar®插件・选项 22,000元 Aimsun接口插件・选项 19,000元 OpenFlight接口・选项 26,000元 DS项目转换插件・选项 26,000元 Legion接口插件・选项 5,200元 Simulink接口插件・选项 26,000元 驾驶诊断插件・选项 26,000元 方向盘扭矩・选项 ※4 59,000元 cycleStreet接口插件・选项 7,700元 集群插件・选项 ※5 56,000元 HUD(虚拟显示屏)插件・选项 19,000元 仪表盘显示(独立的监视器显示)插件・选项 19,000元 FOVE插件・选项 19,000元 HTC VIVE插件・选项 19,000元 Mindwave接口插件・选项 19,000元 照相机传感器基本插件・选项 52,000元 照相机传感器接口・选项 ※4 132,000元 Log数据UDP受信・选项 19,000元 CAN信号接口・选项 ※4 59,000元 A/D Board接口・选项 ※4 118,000元 3D点云成形管理插件・选项 20,000元 照片处理扩展插件・选项 15,000元 SfM (Structure from Motion)插件・选项 33,000元 激光传感器・选项 ※4 118,000元 泥石流模拟插件・选项 22,000元 Rhino®插件・选项 6,600元 Kinect插件・选项 15,000元 UAV插件・选项 19,000元 环境评估插件・选项 23,000元 噪音模拟插件・选项 超级计算机・选项 ¥1,600元/月 超级计算机云®流体分析接口插件・选项 22,000元 VISSIM接口插件・选项 19,000元 视线计测插件・选项 19,000元 对象物检测插件・选项 19,000元 4D模拟编辑插件・选项 13,000元 地震模拟器插件・选项 NEW! 26,000元
相关产品
-
相关产品
-
相关产品 价格 VR-Cloud® Ver.6Flash Version 22,000元 VR-Drive Ver.2 4,600元 UC-win/Road SDK Ver.14 22,000元 UC-win/Road Education Version 3,200元 UC-win/Road Web Viewer 25,000元 UC-win/Road数据转换工具 9,000元 UC-win/Road数据转换工具 for APS-Win 11,000元 City Design Tool(UC-win/Road 3ds Max Plugin) 免费 UC-win/Road Trial Version 免费 UC-win/Road Video tutorial (日语、英语、韩语、中文) 1,800元
UC-win/Road驾驶模拟器
-
UC-win/Road驾驶模拟器 系统价格(套装) 规格 购买数量 1台 10台 20台 UC-win/Road驾驶模拟器
硬件构成
・1/4 Cabin, Full Instrumentation
・3ch. 42” PDP monitor
・5.1ch Speaker, Body Sound
・CFLS Controller
・Active Steering Wheel450,000元 427,500元 405,000元 UC-win/Road Driving Sim 72,000元 60,750元 49,500元 合计 522,000元 /1台 488,250元 /1台 454,500元 /1台 可选项目 1台 1台 1台 ・导航显示器 2,600元 2,300元 1,900元 ・2DOF运动平台(500Kg) 330,000元~ - - ・3DOF运动平台(500Kg) 480,000元~ - - ・左方向盘・离合器踏板(独立软件) 6,600元 4,600元 3,300元
UC-win/Road驾驶模拟器 租赁价格(套装) 规格 租赁期间 1天 1个月 1年 UC-win/Road驾驶模拟器
硬件组成
・1/4 Cabin, Full Instrumentation
・3ch. 42” PDP monitor
・5.1ch Speaker, Body Sound
・CFLS Controller
・Active Steering Wheel
UC-win/Road Driving Sim基本价格
16,000元
追加(1日)
6,600元
基本价格
66,000元
追加(1个月)
26,000元基本价格
150,000元
追加(1年)
99,000元
UC-win/Road演示模拟器
演示模拟器硬件
UC-win/Road Advanced基本价格
4,600元
追加(1日)
1,900元基本价格
19,000元基本价格
46,000元安装费/搬运费 运输/移动前后1日免费、其他按租赁收费。
包装、运送、搬运费按照实际费用收取。
安装费3,300元(派遣1名技术员的住宿旅费)
UC-win/Road体验模拟器(6轴运动平台) 租赁价格(套装) 规格 租赁期间 1天 1个月 1年 UC-win/Road体験模拟器
硬件构成
・蛋形驾驶舱, 2C涂装 ・6DOF运动平台
・3ch. 32” LCD monitor
・5.1ch Speaker, Body Sound
・力反馈方向盘
・加速/刹车踏板系统
・方向指示器、变速装置选项
UC-win/Road Driving Sim + 运动平台选项基本价格
27,000元
追加(1天)
10,400元基本价格
110,000元
追加(1个月)
52,000元基本价格
277,000元
追加(1年)
250,000元安装费/运输费 运输/移动前后1日免费、其他按租赁收费。
包装、运送、搬运费按照实际费用收取。
安装费3300元(派遣1名技术员的住宿旅费)
UC-win/Road简易模拟器 租赁价格(套装) 规格 租赁期间 1天 1个月 1年 UC-win/Road简易模拟器(一般)
硬件构成
・1台PC(支持3屏输出) ・17”LCD monitor 3台
・游戏用方向控制器 ・游戏座椅
UC-win/Road Driving Sim基本价格
6,600元
追加(1日)
2,600元基本价格
26,000元基本价格
59,000元UC-win/Road簡易模拟器(教育版)
硬件构成
・1台PC(支持3屏输出) ・17”LCD monitor 3台
・游戏用方向控制器 ・游戏座椅
UC-win/Road Driving Sim基本价格
4,800元
追加(1天)
2,300元基本价格
21,000元基本价格
47,500元UC-win/Road簡易模拟器(教学版)
硬件构成
・1台PC(支持3屏输出) ・17”LCD monitor 3台
・游戏用方向控制器 ・游戏座椅
UC-win/Road Education Version基本价格
3,900元
追加(1天)
1,600元基本价格
15,800元基本价格
35,600元安装费/运输费 运输/移动前后1日免费、其他按租赁收费。
包装、运送、搬运费按照实际费用收取。
安装费3300元(派遣1名技术员的住宿旅费)
视线追踪仪租赁价格 规格 租赁期间 1天 1个月 1年 视线追踪仪 EMR-9
硬件构成
・EMR-9(帽型双目标准套60Hz检测・视野镜头44°)
・追加视野镜头(92°) ・帽子LL规格
・电池2个 ・电池充电器
・EMR-dFactory(解析软件) ・腰包
・彩色液晶取景器
・串行转换线
・分析软件专用电脑(软件装载完成)
・快门开关基本价格
16,000
追加(1日)
6,600
DS同時使用时
基本价格
9,900
追加(1天)
3,900基本价格
66,000
追加(1个月)
26,000
DS同時使用时
基本价格
39,000
追加(1个月)
15,800基本价格
150,000
追加(1年)
99,000
DS同時使用时
基本价格
91,000
选项追加(1年)
59,000安装费/运输费 运输/移动前后1日免费,其他租赁收费。
包装、运送、搬运费按照实际费用收取。
安装费3,300元(派遣1名技术员的住宿旅费)
UC-win/Road驾驶模拟器一览 驾驶模拟器 硬件价格 详细信息 
紧凑型研究用模拟器
(2010年)450,000元
(不含税)
(3ch标准)- 研究用模拟器(包含UC-win/Road DSop.)
- 全部件,计表盘采用实车部件
- 左右方向盘、自动档标准(手动Op.)
- ActiveSteering标准、MP(1-6軸)选项

Driving模拟器
(2013年)2,200,000元
(不含税)
(3ch 标准)- 3ch. 32” LCD monitor(包含UC-win/Road DSop.)
- 6DOF 运动平台(有效负载350kg)
- 5.1ch Speaker, Body Sound
- 力反馈方向盘(SENSO-Wheel)
- 加速刹车踏板系统
- 方向指示器、目标插件

紧凑型驾驶模拟器
(2014年)250,000元
(不含税)
(3ch 标准)- 转向系统,踏板(油门、刹车)
使用实车部件 - 对应左右方向盘、自动档标准(手动Op.)
- Active Steering标准
- LCD仪表盘Op

高龄者驾驶简易模拟器
(2014年)90,000元
(不含税)
(1ch 标准)- 21.5” LCD monitor
- Kinect™传感器
- 实车部件(转向灯・雨刷)
- 实车方向盘
- 危险提示开关

SimCraft模拟器
(2014年)580,000元
(不含税)
(3ch 标准)- 3ch.40” LCD monitor
- 3轴运动平台
- 高级别游戏方向盘
- 方向盘・刹车(附带负载调整功能)
※运动平台构成、对应Option


Flight模拟器(左)、Racing模拟器(右)
BlueTiger (2014年)480,000元
(不含税)
(3ch 标准)- 3ch. 32” LCD monitor
- 2轴运动平台
- 飞行模拟器用界面
- 座椅振动器
(不包含UC-win/Road)
运动平台选项、
连接开发及设置调整费另计
可对应Drive类型

Demo 模拟器(2007年)
80,000元
(不含税)
(1ch 标准)- 小型演示用模拟器不包含UC-win/Road)
- 展示、介绍用紧凑型、Start/Stop按键
- 安装方向盘,加速及刹车
VR-Cloud®云服务器构建/租赁价格
-
VR-Cloud®云服务器构建/租赁价格
-
■服务器构建例 (UC-win/Road每个数据)
构成 UC-win/Road
Ultimate构成UC-win/Road
Advanced构成UC-win/Road
Standard构成VR-Cloud® Flash Version 118,000元 79,000元 58,000元 VR-Cloud® Standard 118,000元 79,000元 58,000元 VR-Cloud® Collaboration 132,000元 92,000元 71,000元
■规格
版本名称 规 格 价 格 系 统 备 注 UC-win/Road
主体及
VR-Cloud®1)VR-Cloud® 主体(每个服务设备) UC-win/Road Ultimate构成、
UC-win/Road Advanced构成、
UC-win/Road Standard构成服务器构建例
参照2)Road数据(原始数据处理) 原则上,不需要数据处理/调整 原则上不需要 3)主体和数据激活 如果有多个数据,则必须设置时间表、
任务等。原则上总是运行
服务器租赁费
4)服务器租赁费
基本费用:
UC-win/RoadVR数据1、
设置同时访问5个客户端对应各种服务器
1.利用FORUM8服务器
2.利用数据中心服务器
对应各种回线
100MB~1GB、尽可能用专用线路基本服务器
租赁价格表
参照版本名称 规 格 价 格 设置内容 备 注 VR-Cloud®
服务器・HP
設定费用1)IIS设置、服务器ー文件夹构建 不包含Web服务器运用/管理费。 ¥200,000 2)VR-Cloud®设置、数据复制、动作确认 3)VR-Cloud®用HP制作 页面、菜单制作和链接设置等 另行估价 ※详情请向营业窗口咨询。
※ 每个服务器(1CPU)1数据的设置费用。最多可设置的同时使用人数为99(CAL=99客户机) 。
※ 关于系统构造,根据本公司选定的硬件规格、软件进行。
※ 包含标准的系统设置和初期导入服务,但不包含运行管理费用。
■基本服务器租赁价格 (UC-win/Road每个数据)/租赁系数:
租赁系数 基本租赁定价 2周 1个月 2个月 3个月 6个月 1年 1年以上
每个月标准5client ※1 0.50 0.65 0.85 1.00 1.70 3.00 0.2 追加5client ※2
租赁价格 基本租赁定价
(3个月)2周 1个月 2个月 3个月 6个月 1年 1年以上
每个月VR-Cloud® Flash Version / Standard 标准5client 19,000元 ※1 ¥150,000 ¥195,000 ¥255,000 ¥300,000 ¥510,000 ¥900,000 ¥960,000~ 追加5client 3,900元 ※2 ¥30,000 ¥39,000 ¥51,000 ¥60,000 ¥102,000 ¥180,000 ¥192,000~ VR-Cloud® Collaboration 标准5client 19,000元 ※1 ¥165,000 ¥214,500 ¥280,500 ¥330,000 ¥561,000 ¥990,000 ¥1,056,000~ 追加5client 3,900元 ※2 ¥33,000 ¥42,900 ¥56,100 ¥66,000 ¥112,200 ¥198,000 ¥211,200~ ※1 包含服务器设置费。不包括数据调整。 ※2 每增加5个客户收费。
■参考 : 我公司提供环境 (云服务器/回线)
环 境 名 称 ( 参 考 ) 服务器主体 Dell社lPrecisionR5400 四核英特尔®Xeon®处理器
E5450(2x6MBL2缓存、 3.00GHz,1333MHzFSB) x 2台
8GB(2GBx4)四通道DDR2-SDRAM内存(667MHz、ECC)
1TBSATA3.0Gb/sNCQHDD(7200转) x 2 SATARAIDLevel1(HDDx2)构成
NVIDIA®Quadro®FX5800、4GBDDR3内存OS Microsoft® Windows®7Professional64位普通版(日语/英语版)
Windows Server(TM) 2003 SP1 Standard Edition提供者合同,域名 获取固定的IP地址 服务器ー维修系统 24小时技术电话支持(带有电子邮件支持)(24小时365天),5年的当日在线维护服务 网络 USEN BROAD GATE02 光商务访问 千兆IP8、1Gbps
教育版价格
面向教职、研究人员和学生等教育相关用户提供更加优惠的教育版价格。
-
教育版价格
-
产品名 教育版价格 UC-win/Road Ver.17 Ultimate 90,400元 UC-win/Road Ver.17 Ultimate 5个授权套装 143,000元 UC-win/Road Ver.17 Driving Sim 57,600元 UC-win/Road Ver.17 Driving Sim 5个授权套装 102,000元 UC-win/Road Ver.17 Advanced 46,400元 UC-win/Road Ver.17 Advanced 5个授权套装 79,000元 UC-win/Road Ver.17 Standard 31,200元 UC-win/Road Ver.17 Standard 5个授权套装 54,000元 UC-win/Road Ver.17 CIM Lite 24,800元 UC-win/Road Ver.17 Multi User Client Version 5,600元 UC-win/Road Ver.17 Presentation Version 2,400元 UC-win/Road Ver.17 Cluster Client Version 2,400元 版本开发履历
-
版本开发履历
-
UC-win/Road Ver.15 版本 发布日期 主要升级内容 16.0.0 22/06/03 - 扩展文件CityGML对应
- OpenDrive加载功能对应
- 多用户场景功能
- 道路横断面CSV输入/输出功能对应
- 无人机插件:紧急停止按钮
操作环境
-
操作环境
-
OS Windows 8.1 / 10 (推荐 64bit OS) CPU 英特尔® i5-3470,i7-3770以上或更高版本同等性能
(推荐 CPU 3.2GHz, 3.2GHz、四核或更高)所需内存(包含OS) 4GB以上(推荐 64bitOS+8GB以上) 所需磁盘空间 8GB以上(推荐 10GB以上)
※安装此产品所需的可用空间,包括地形数据和样本数据。
考虑从RoadDB下载和AVI记录数据,建议使用10GB或更大的空间。显卡 NVIDIA® GeForce GTX560以上、显存 1GB以上、OpenGL3.1以上
(推荐 GeForce GTX670、Quadro 4000以上、视频内存 2GB以上、OpenGL4以上)
>> Video Card信息 >> 基准测试结果
显示器(画面分辨率) 1024×768以上(推荐 1920×1080以上)
※屏幕设计和字体大小仅支持默认设置输入数据扩展名 RDC、RD 文件输出 >> 数据文件输入输出 与其他产品的联动 <读取>
Engineer's Studio®
桥墩设计/3D配筋
箱式基台设计计算
基台设计/3D配筋
RC下部结构的设计计算
拉面桥墩的设计计算
基础设计/3D配筋
深基础框架设计/3D配筋
挡土设计/ 3D CAD
临时结构的设计/3DCAD
双重切工的设计·3DCAD
稳定计算斜面
BOX涵洞设计/3D配筋
BOX涵洞设计/3D配筋(下水道耐震)
挡土墙设计/3D配筋
井盖设计/3D配筋
UC-Draw工具(Box culvert、Earth retaining、Temporary bridge、Abutment)备注 ※DVD-ROM驾驶、推荐搭载声音版 。
※在进行驾驶模拟的情况下,推荐使用可与电脑主体用USB连接的市售导向控制器(另售)。
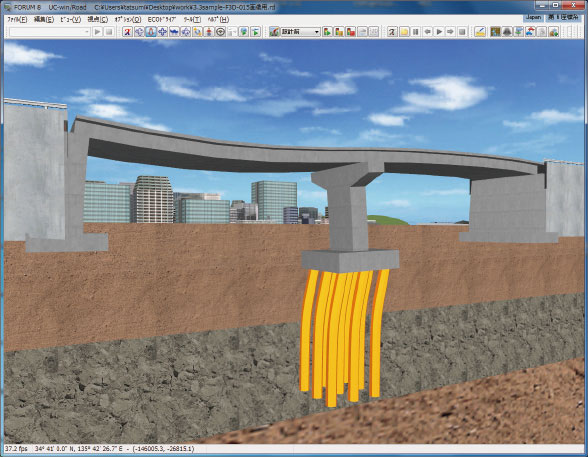
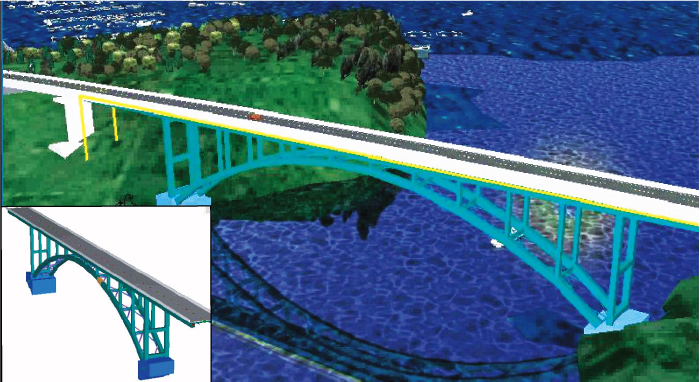
※使用RoadDB(样本数据、样本模型的下载功能)时,需要互联网连接环境。-桥梁/隧道-
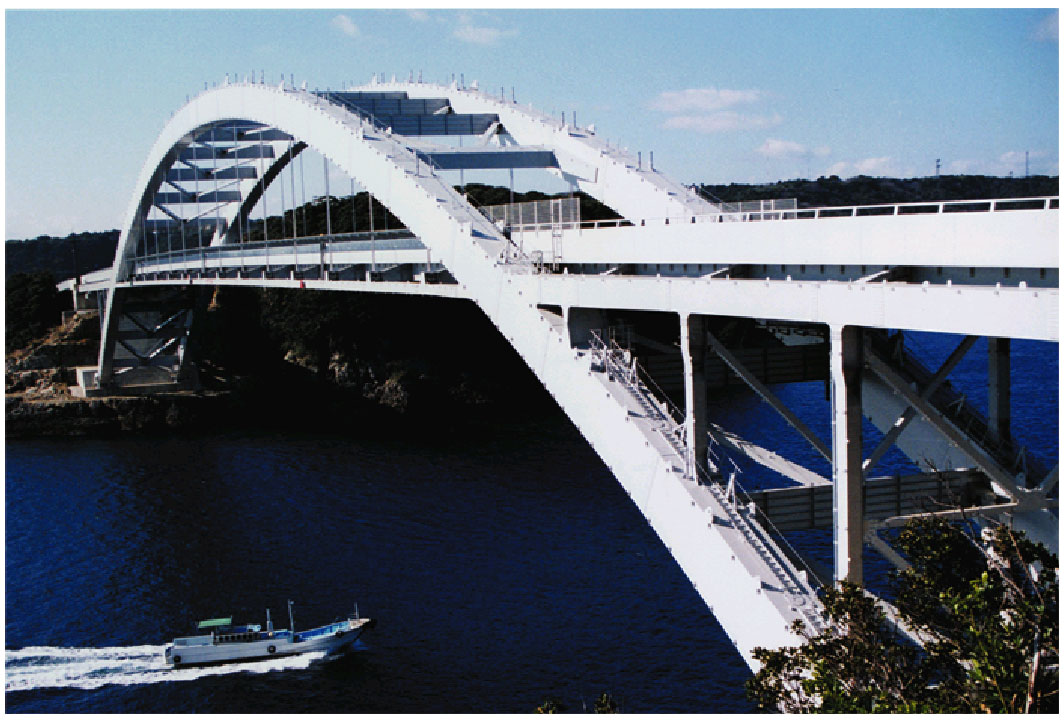
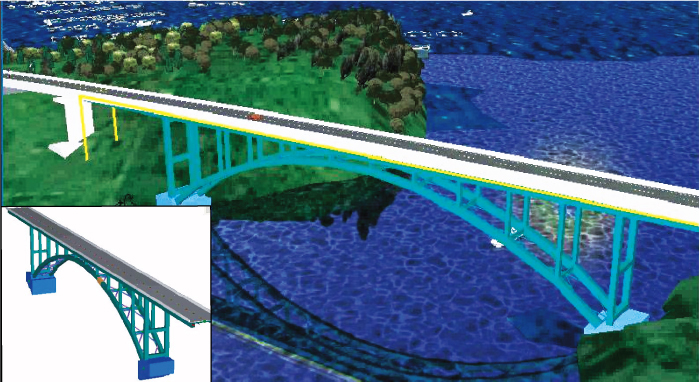
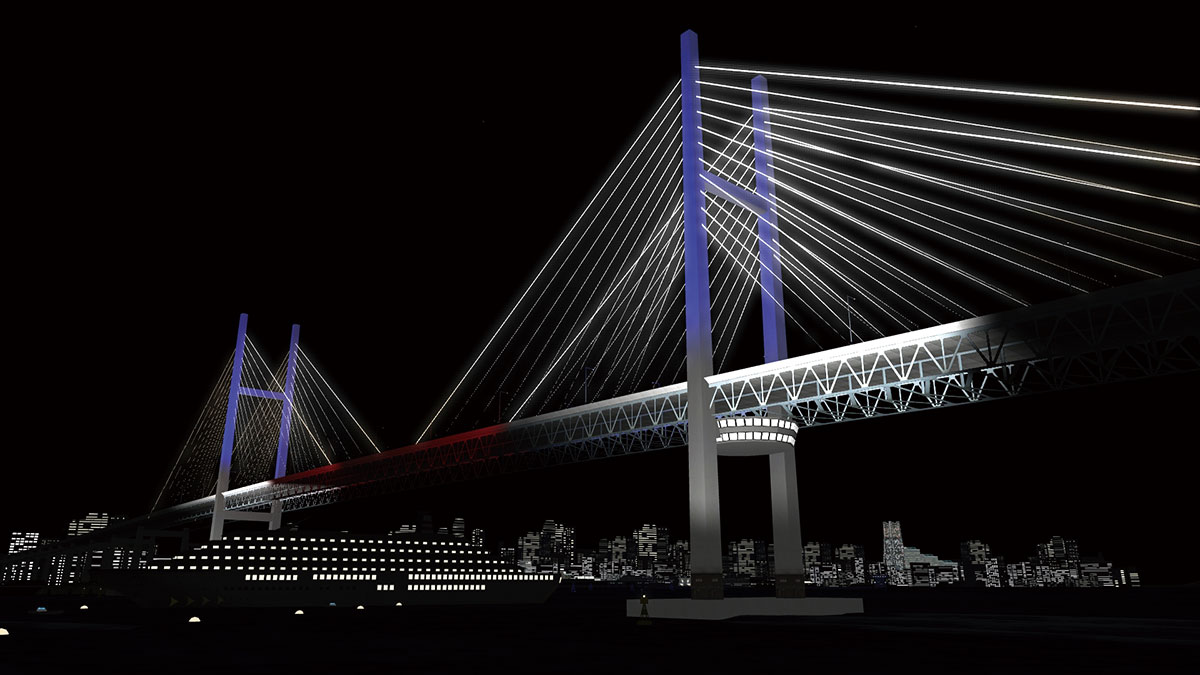
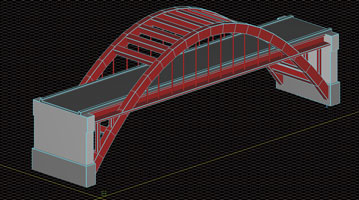
桥梁形式的选择上也体现了动态三维VR的效果。桥梁模型可从FORUM8公司的[RC下部工的设计计算]、UC-1设计系列、[UC-win/FRAME (3D)[Engineer's Studio®]等设计数据中直接以3DS形式导出。可应用于桥梁形式、桥梁色彩的讨论,此外,也可用于结构物的日照阴影的讨论,可根据季节时间变化实时观测影子的效果。配合行驶、歩行、飞行等模拟手段,在景观讨论中效果卓越。

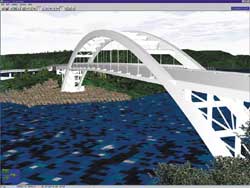
▲实景比较(左:实景拍摄,右:UC-win/Road屏幕)
日本光荣株式会社K本大桥向Naega Loop Bridge提供的数据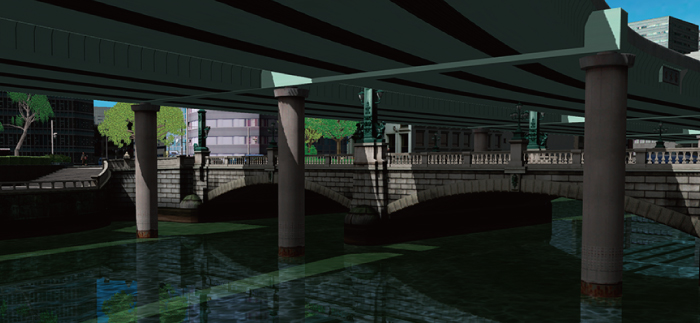
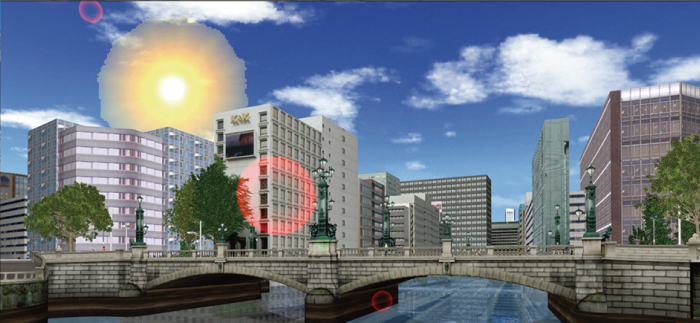
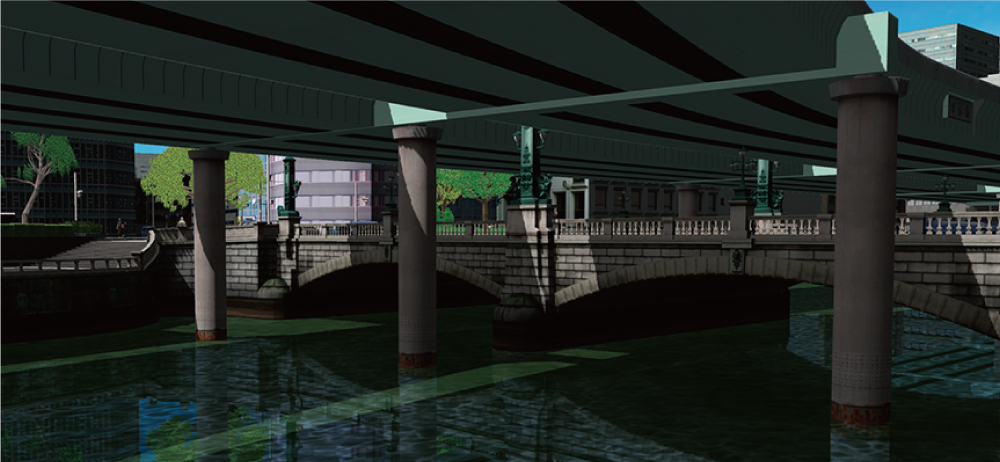
▲ 高速公路高架桥去除前后对比 前(左)/后(右)(日本桥河)
▲高精度渲染实现精细的阴影效果

▲显示桥梁的照明

▲在濑户大桥上开车时的风景
▲Engineer's Studio® 3DS导入

▲隧道内部

▲隧道井口设计

▲VR向隧道管理人员
培训系统(BMIA(法国))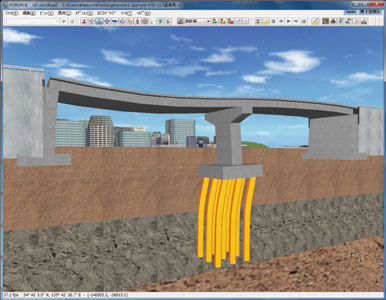
▲通过Engineer's Studio®导出
3D模型
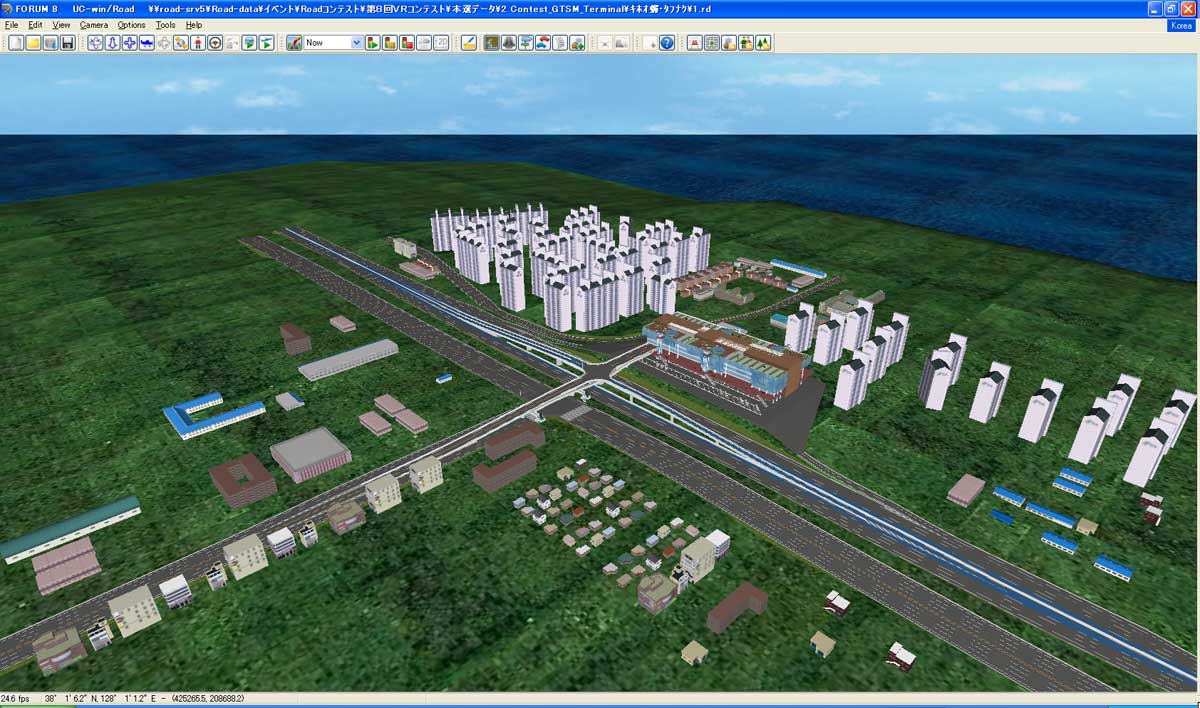
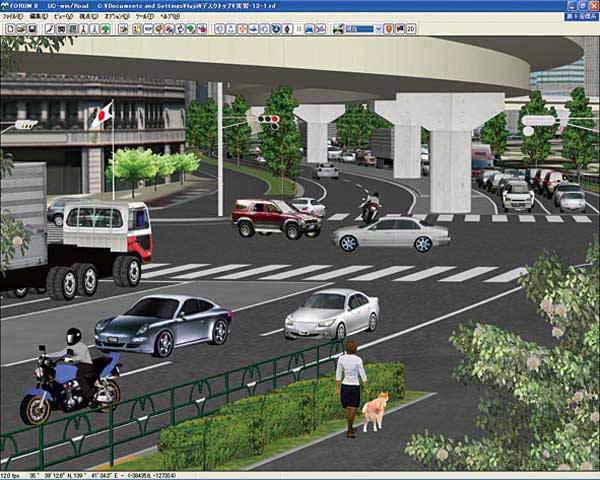
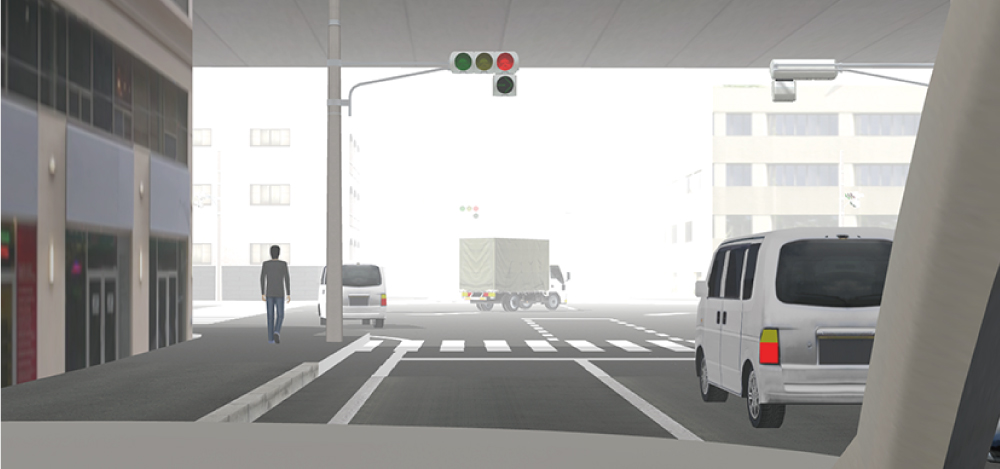
-交通-
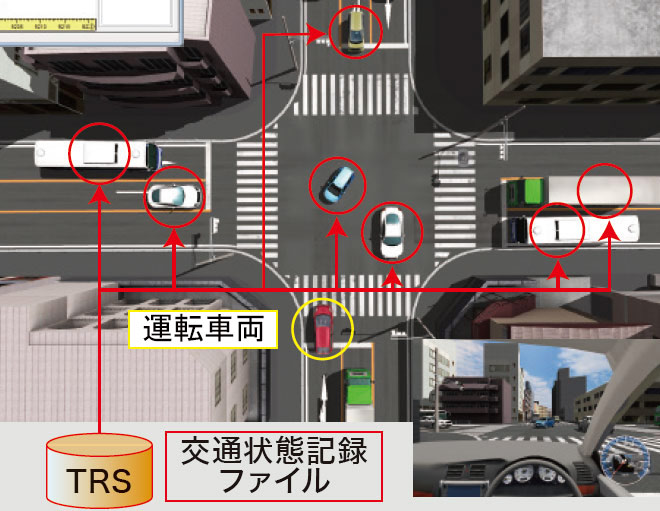
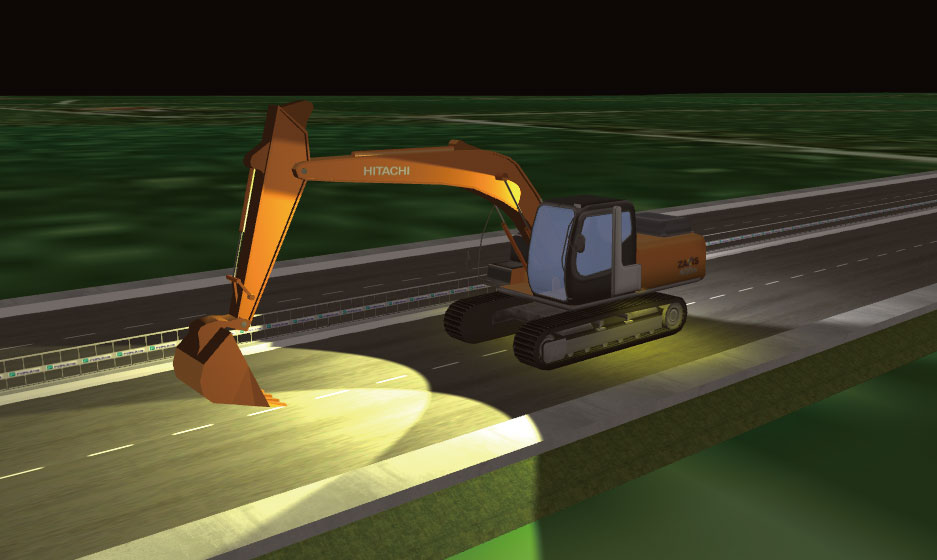
支持基于交通量和车辆配置文件的交通仿真。可以对应车辆性能和垂直坡度进行模拟。可以施行绕行模拟和大规模车流量模拟。通过与各种流量分析软件链接,可以有效地使用流量模型数据。

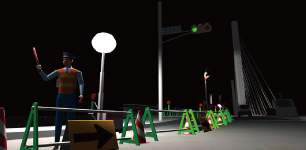
▲第十二届3D VR模拟大赛大奖赛
“夜间施工中的VR交通管制模拟”岩崎株式会社企划研究部
使用UC-win / Road,您可以轻松地研究景观,道路设计和交通状况,还可以通过驾驶模拟从驾驶员的角度检查道路状况。


能够播放由移动3D模型代表的各种类型的模拟动画。 通过UC-win/Road和其他交通模拟,可以记录和届放交通流。
●OSCADY PRO插件 交通信号灯设计软件
可以执行自动信号设置和安排,并且可以逐步,快速地优化信号容量,交通拥堵和交通信号。

●SIDRA插件 VR模型自动生成工具
使用十字路口设计软件SIDRA和UC-win/Road设计的用于十字路口的VR表示插件。

可以读取VISSIM的交通流分析结果并进行模拟。

在UC-win/Road的3D空间中复制了Aimsun的车辆行为和信号显示的交通模拟。

(社)交通工学研究会
刊载了UC-win/Road的检证项目
https://www.forum8.co.jp/topic/up68-p4.htm
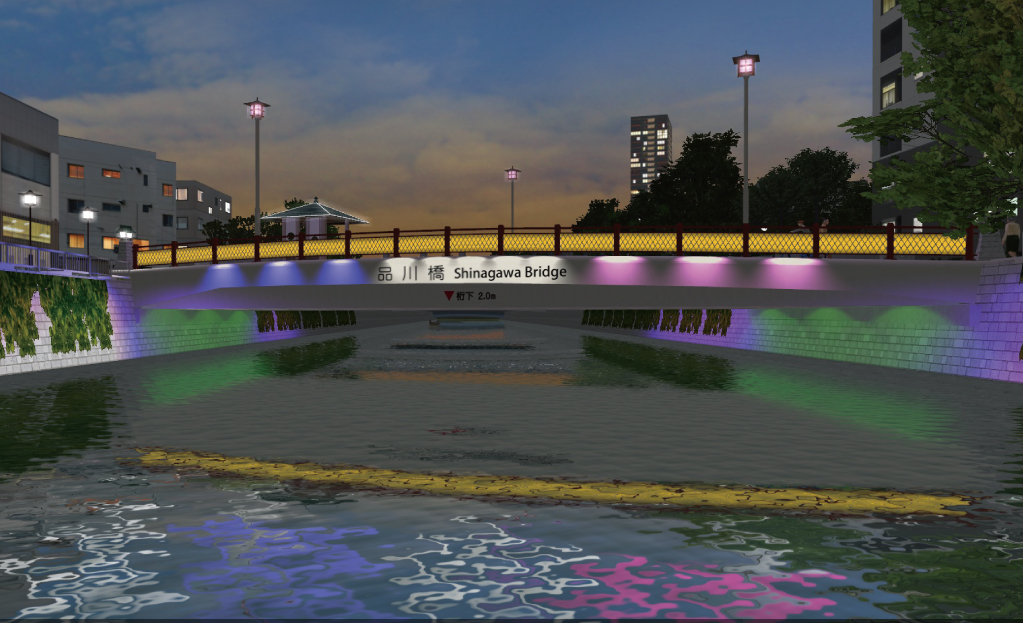
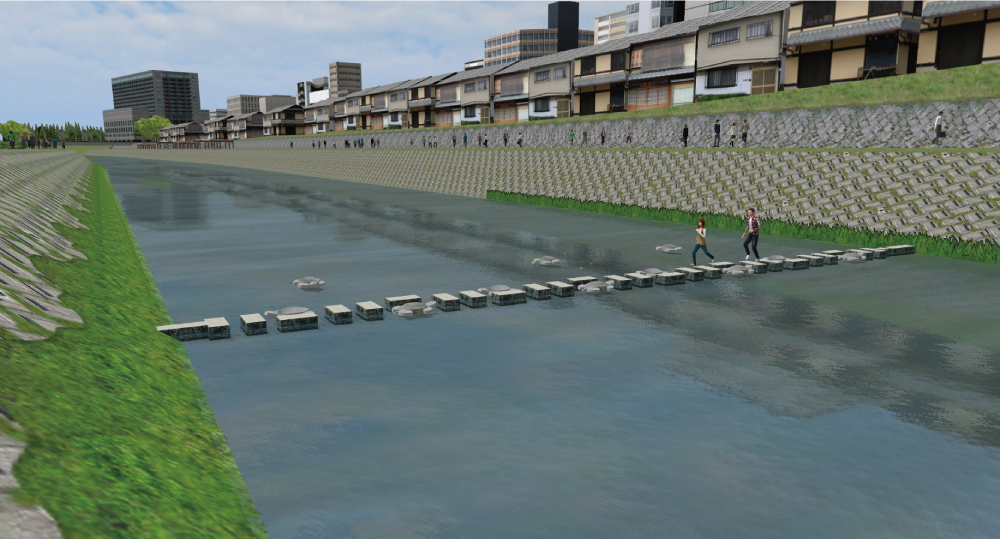
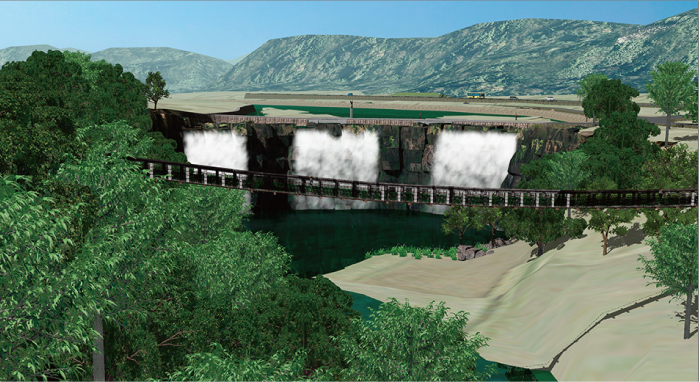
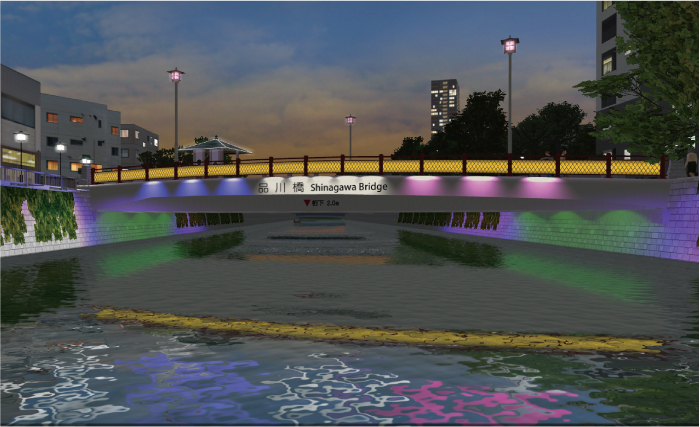
-河川-
可应用于河道改良、治理规划等方面,利用材质命令还可定义流动效果。
▲第13届3D VR模拟竞赛优秀奖
京都市伏见技术高中的“ Higashitakase河周围环境改善模拟”
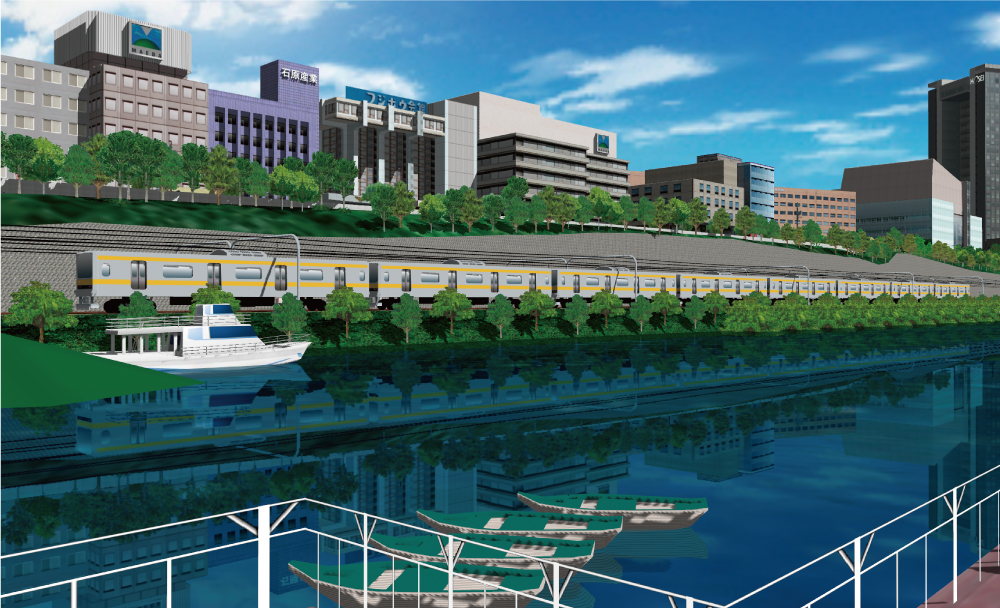
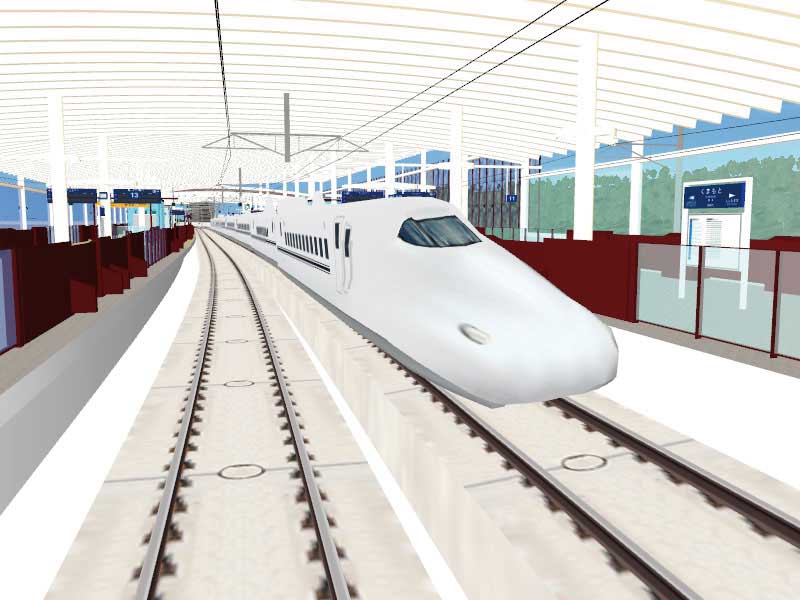
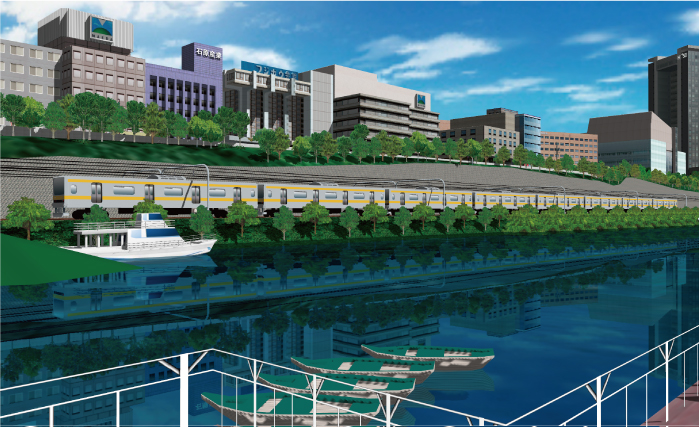
-铁道-
在铁道及轨道等新型交通系统方面,同样可利用道路模拟的方法实现。立体交差、下穿立交、桥上化等方案比较均可简单作成、车站周边的二次开发、车展附属工程的规划等,均可运用到三维虚拟现实。
我们还提供各种系统构造,例如用于研发,教育和培训以及公共关系展览的火车运行模拟器。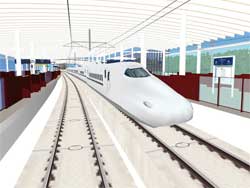
▲第10届3DVR模拟竞赛
大奖“操作设备安装位置检查系统”
制作人:铁路建设运输设施发展支持组织
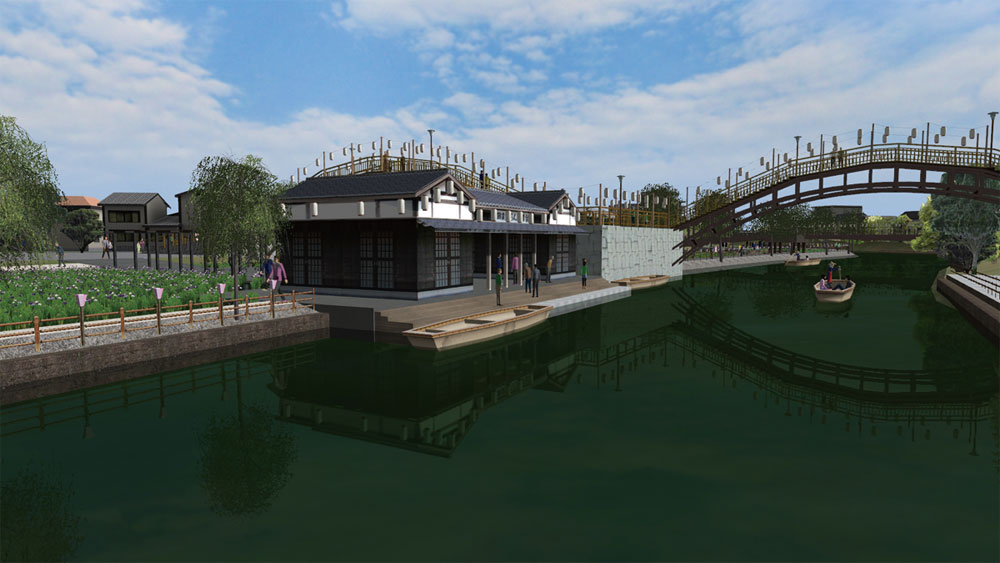
-港湾/空港-
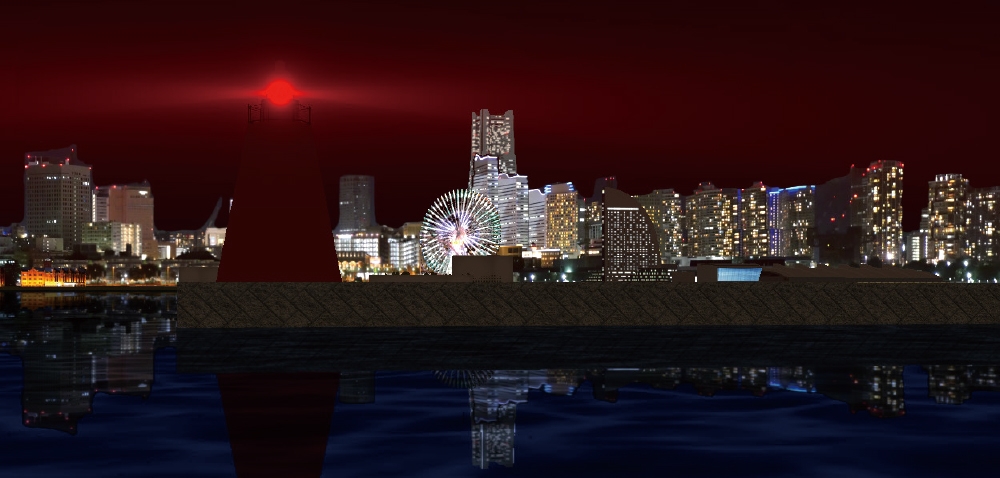
港湾、空港的模型可利用航空图片进行广域范围的模拟。船舶等的航路,可通过飞行路径进行动作设定,各种船舶的航行均可表现。飞行模型可通过设定飞机表现其 起飞和着陆。海岸、海中的模型可通过倒影效果表现 ,素材丰富的数据库同时提供下载。

▲横滨港样品模型

▲神户港样品模型

▲按飞行路线定义飞机起降
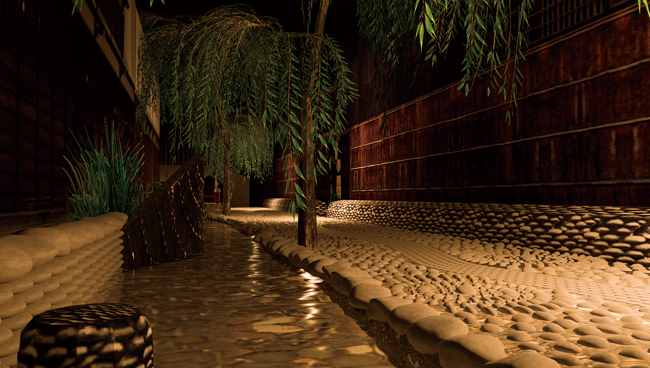
▲水乡和水路的范例(郡上八幡)
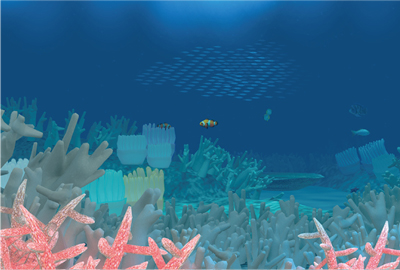
▲海中图像模型
珊瑚礁= 3D树·鱼= MD3角色
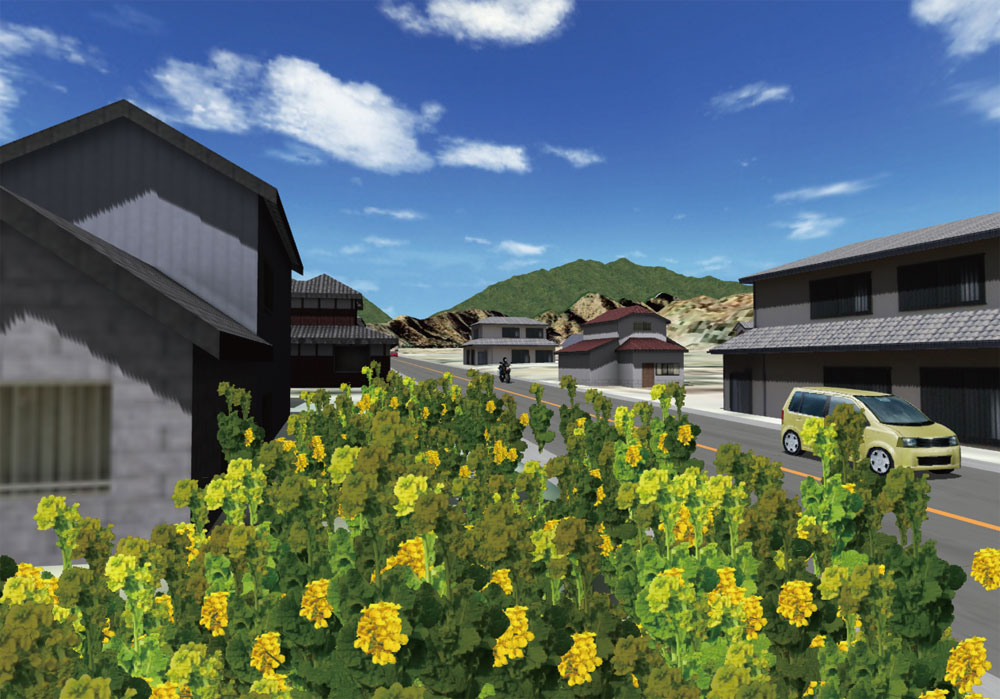
-公园/住宅区-
在设计公园或住宅区时,可以在整个计划的VR空间中浏览并切换计划的显示,从而在检查图像的同时研究风景等计划。可以使用各种模拟,例如使用丰富的树木纹理和高表现力的3D树木进行种植研究,以及研究规划对人流和交通的影响。
▲第10届3DVR模拟竞赛
评委特别奖 社区发展奖
“校车路线维护计划模拟”
创作:Tatsumi设计顾问有限公司
▲第14届3DVR模拟竞赛大奖
“关于在筑城城内进行城市景观规划的建议
确认模型”创作:大分县杵筑市
▲城市与建筑博客-信浓大街
(NPO社区发展讲习班)
▲第13届3DVR模拟竞赛
设计奖“N House房屋设计研究”
虚拟现实模拟 创作:工作室唐
▲第9届3DVR模拟竞赛
提名奖“BAN JAR水上乐园”
创作:FUJICON PRIANGAN PERDANA,PT(印度尼西亚)
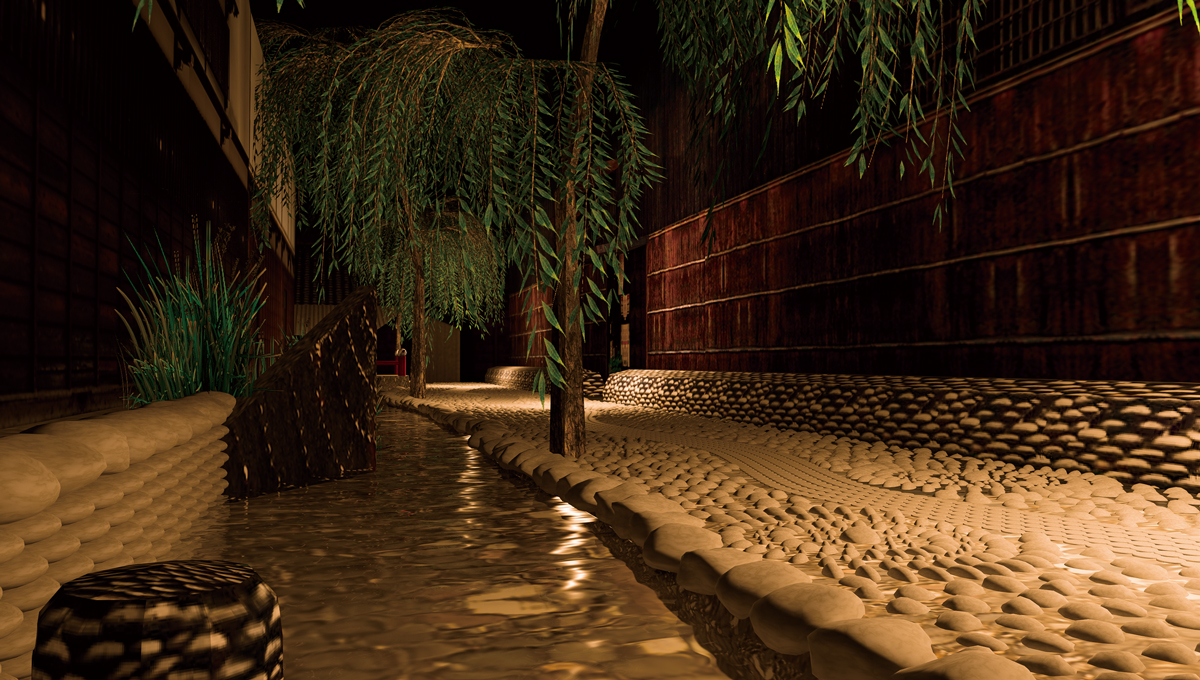
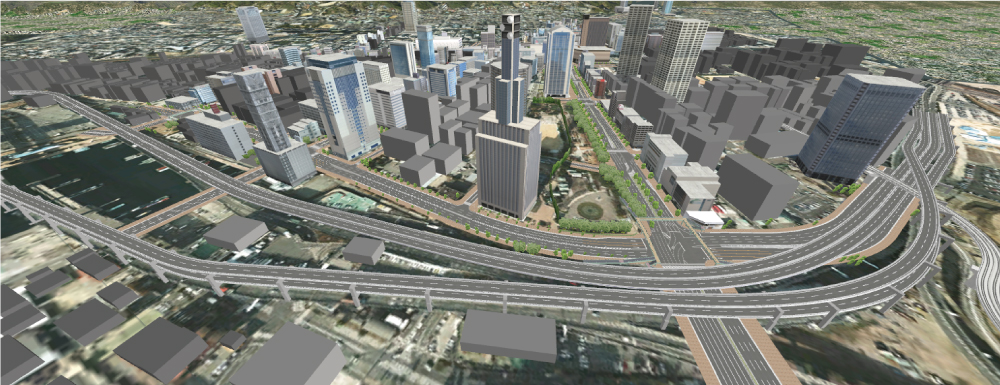
-都市/街路-
在公园和城市街道设计领域,可用于树木栽培的讨论、树种的比较选定,同样可模拟春夏秋冬、5年后、10年后的样子。街道的改良计划、车展前的二次开发,三维交通流、3D人物模型的利用,可综合用于城市空间的动态表现。还对应了可实现夜间材质切换表现的人造灯光效果,通过该功能可进行白天黑夜的效果比较和评价。

▲第15届3DVR模拟竞赛
大奖
境港创造的“境港茂水木路”
▲第14届 3DVR模拟竞赛
社区发展奖“〜让您有一天回家的城市规划项目〜
梦想地带!淡路市梦梅台可持续公园
-向紧凑型城市迈进-” 创作:兵库县淡路市政厅
▲昼夜景观评估(昼)
▲昼夜景观评估(夜)


▲第9届 3DVR模拟竞赛创意奖
“使用VR在设计城市神户建立共识以实现景观形成”
神户市规划局
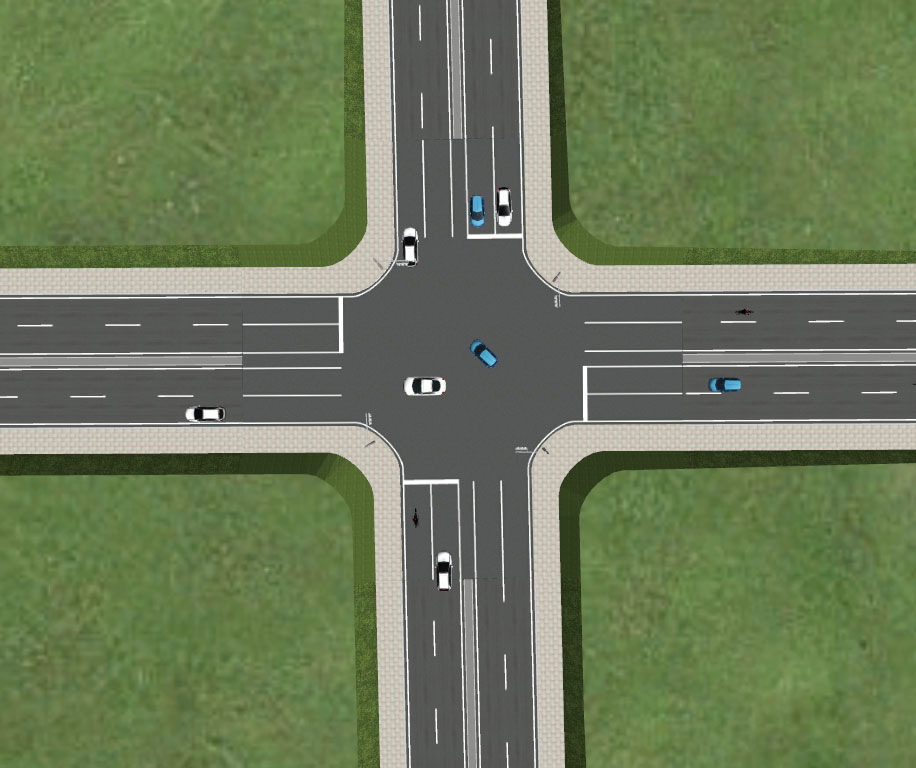
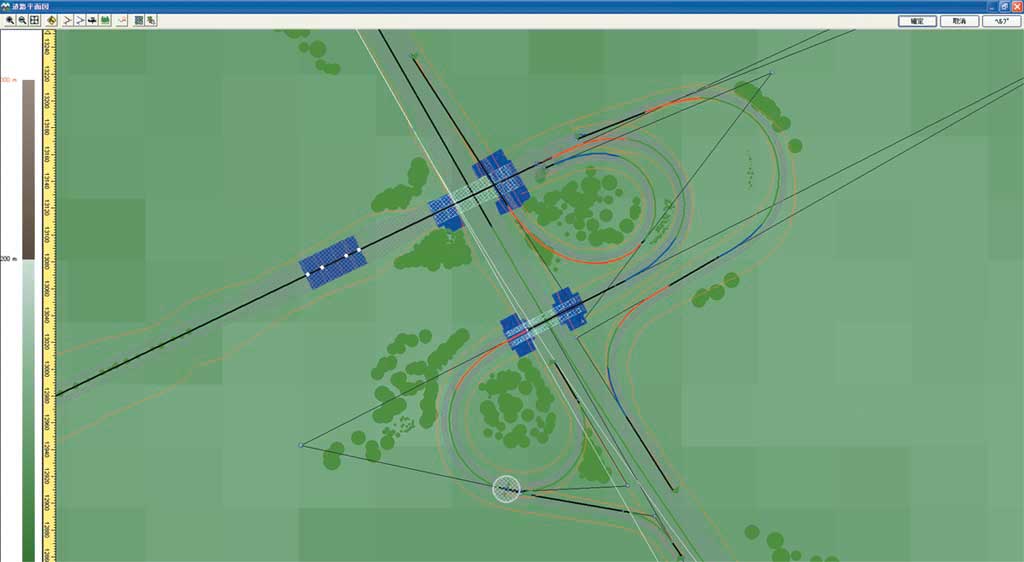
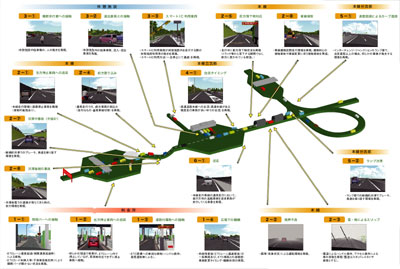
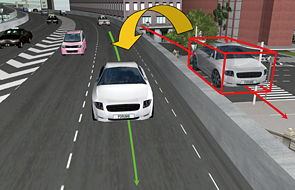
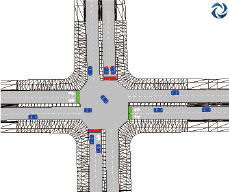
-道路仿真-
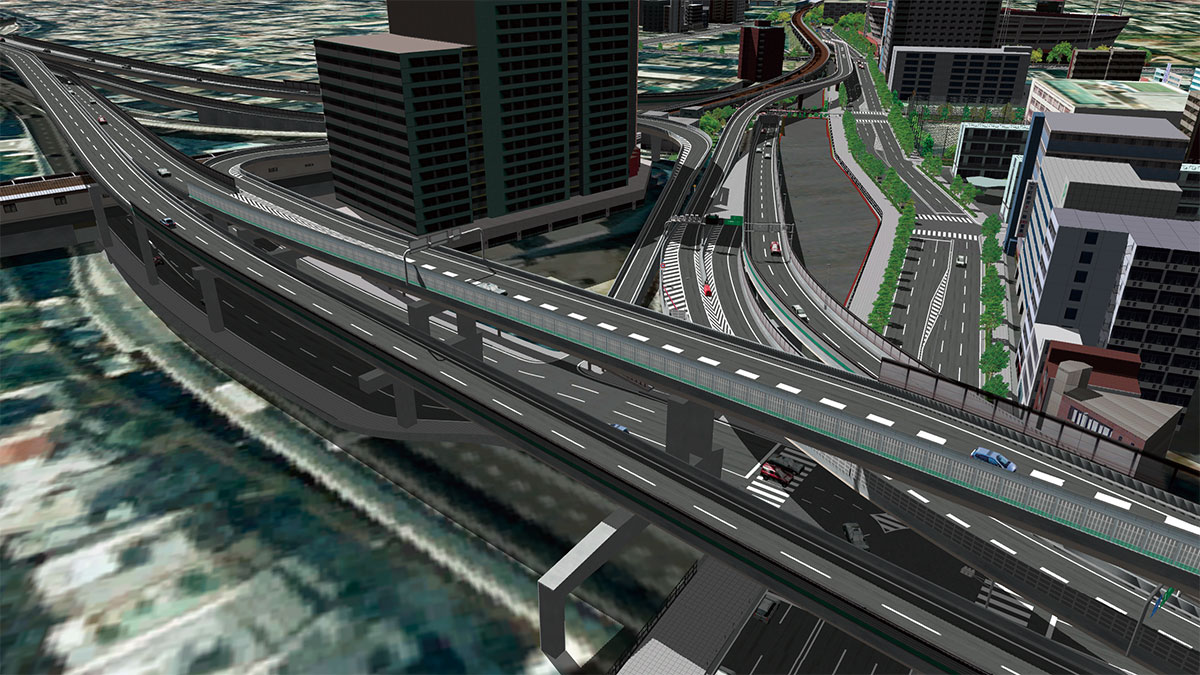
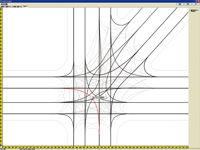
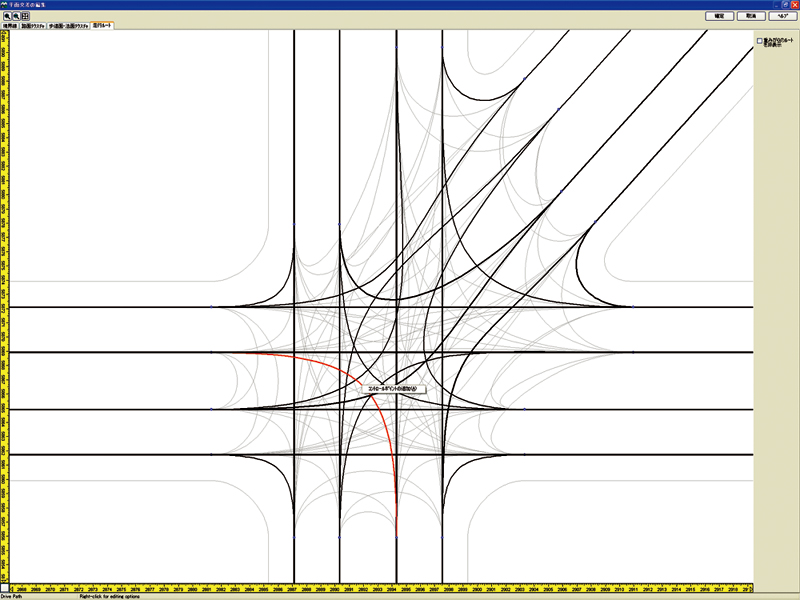
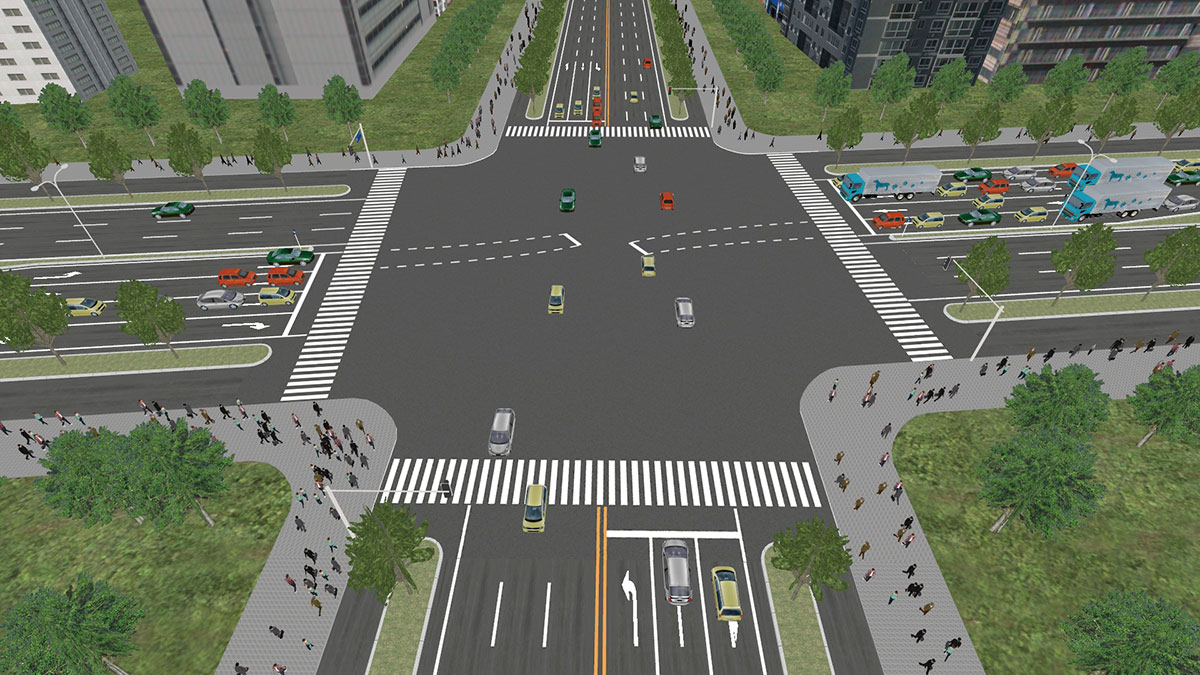
在填方挖方落石台等的边坡评价中,可自由掌握移动速度对内部景观、外部景观进行模拟。丰富的道路功能,可简单完成立体交叉、隧道、桥梁、平面交叉点的制 作,并能可视化地定义复杂交叉点的形状、材质、行驶路径、交通控制。通过On/Off匝道定义功能,复杂的立体交叉也可在短时间内切完成。通过时间交通 量、车辆种类的分布属性设定,在交通堵塞模拟、高速公路规划的交通量比较方面可得到广泛应用。
▲立交(1)

▲立交(2)
▲环岛(1)
▲环岛(2)



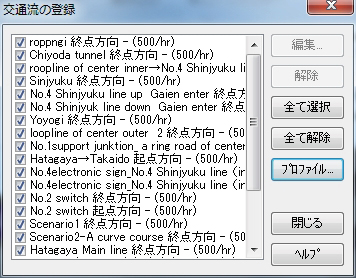
▲Traffic Generators(产生交通/交通流)
通过设置车辆类型比率和每小时交通量来实现交通产生和车辆碰撞控制的交通模拟。
从左上角起,交通路线,按每小时交通量和车辆类型的比率设置屏幕。1.动作环境
- 需要特别的电脑吗?
-
最近市场上卖的电脑的板载图像处理功能比以前更加优越。只要是图像处理功能强化了的电脑就可以操作3DVR。
推荐规格例:
OS Windows 7、8.1 的64bit版
CPU Intel Corei5、Corei7
必须内存 8GB以上
显卡 Open GL2.1 (推荐11GB以上)
Desktop:
NVIDIA Geforce GTX 970、980
NVIDIA QUADRO K5000、K5200、K6000
Note:
NVIDIA Geforce GTX 980M
显示器 推荐分辨率 1920×1080以上
如果有不清楚的地方参照以下联系方式进行询问。销售窗口(免费电话):021-6859-9898
- 搭载Radeon显卡的计算机有问题吗?
-
如果对应OPENGL的话,基本上没有问题。但是,在NVIDIA显卡下没有问题可进行描画的数据,有可能在Radeon显卡下不能正常描画。
此外,发生问题后有可能无法立刻解決。故此,允许的情况下推荐尽可能使用NVIDIA的显卡。 - (株)可以使用HORI制造的方向操纵控制器EX吗?
-
系统支援的方向操纵控制器采用的是通常可与PC连接的控制器。
(株)HORI制造的方向操纵控制器EX是微软软件Xbox用的设备,该外部设备与PC连接可用于通常的游戏,所以属于系统兼容的范畴可以使用。但是,以上并未经过本公司实际确认,敬请理解。 - PC中利用了[.NET Framework 3.0]的情况,会发生什么问题吗?
-
经本公司确认安装有[.NET Framework 3.0]的PC上系统没有问题可正常运行。
-
UC-win/Road用于台式PC时,推荐配置是什么?
1) OS
2) CPU(主频)
3) 内存容量
4) 视频内存容量
5) 画面分辨率
6) 硬盘容量
7) 画面的物理大小(15英寸、17英寸等)
8) 打印机端口等、特別需要的硬件
9) 其他注意事项。 -
UC-win/Road使用时必要的环境配置,请参照下述页面。
UC-win/Road 产品利用环境 >>价格/购买>操作环境
此外,关于7)~9)说明如下。
7)画面的物理大小→ 越大越容易观看。
8)打印机端口等、特別需要的硬件
→ 进行驾驶等时候,需要上述控制器。
9)如有其他注意事项请赐教。
→ 内存、显卡对动作的影响较大,选择配置时请注意考虑。
2.数据制作
- 追加载入可以认为是读取其他模型数据吗?
-
是的,导入场景时道路也跟其他模型一样被导入,请注意避免重复。
- 景观保存位置可以删除吗?
-
景观保存位置的编辑画面中的[删除]按钮,该按钮如果处于无效状态,有可能是脚本设定中使用了该景观位置。
- 利用模型组放置电线杆时想要设置电线杆的电缆。并且想让电缆的颜色从黑色变成银灰色。
-
变更电线颜色时,在电缆配置完以后,鼠标选择点击电线部分,从弹出的[电缆编辑]画面点击颜色的部分,可任 意设定颜色。目前,还没有批量变更默认颜色设定的功能。为此,操作比较繁琐,需要对每两个柱子间的电线调出编辑设定画面,进行逐个变更。
- 景观位置中可以指定坐标和高度吗?
-
主画面的下方状态栏中显示了现在位置的坐标。该坐标是世界测地系坐标。参考这个坐标可对景观位置进行保存。但是无法指定高度。
关于坐标输入及高度设定,可利用飞行路径进行设定。平面图中定义飞行路径,输入起点位置坐标输。飞行路径的纵断面中设定起点高度。在飞行路径的起点设定动作控制点,速度为0。保存该飞行位置。 - 可以表现照明的点灭(闪烁)效果吗?
-
可通过模型的可动设定实现。UC-win/Road起动时登录的模型中,有一个名为Brinker的模型, 请参考此模型设定。
实现准备好粘贴了亮灯材质和灭灯材质的目标模型,载入到UC-win/Road以后,通过模型编辑的可动设定, 将他们设置在交互替换的位置,由此表现出点灭闪烁的效果。 - 路径飞行时,默认为注视进行方向,是否可指定视线方向。
-
使用Look at Me功能,可以设定想看的方向。顺序如下。
- 在想看的方向上选中某个模型的编辑画面的[控制对象]。
- 道路平面图的飞行路径中追加动作控制点,设定对象[模型]。
- 动作命令设定为[LOOK AT ME]。
以上完成后进行飞行,通过动作控制点后视线将向着设定的模型状态飞行。
- 从Road向Civil3D输出地形数据时,可输出多大规模的地形?
此外,反之从Civil3D向Road导入地形数据时,可输入多大规模的地形? -
从Road向Civil3D输出地形时,原则上可输出Road数据的整体范围。
从Civil3D向Road导入时,最大可以载入20km x 20km的范围,合并时受当前Road的范围限制。 - 车辆在交叉口行驶时,会出现颠簸摇晃的现象。有没有方法消除此现象?
-
按下交通生成按钮,车辆在行驶到交叉口时,会根据路面的起伏変化产生相应的动作。车辆行驶在交叉口出现的颠簸摇晃现象,是对交叉道路的纵断面坡度、横截面相互衔接等路面状态的反映。
- 伴随车道变化,斑马线的位置发生変化时,应该如何进行设定。
-
斑马线区间的変化,使用Transition进行设定。设定Transition时,请注意以下要点。
- 相同方向的车线间的斑马线材质设定在[断面详细]的间隙位置
- 中央分割帯的斑马线材质设定在车道和车道间的断面
- Transition所在前后断面的节点数(横截面的控制点数)需要保持一致,按照这个要求,在斑马线消失的位置断面中仍然要设定宽度为0的斑马线的材质区间
- 在Transition[起点侧的曲率]、[终点侧的曲率]做相应设定
- 飞行路径飞行过程中,希望调整视线为非正中面的指定角度
-
[道路平面]画面中,在飞行路径上点击鼠标右键,选择[追加-动作控制点]。
其次,在[编辑-动作控制点]中选择命令[Sloly Turnhead,或Turnhead],输入需要的角度。 - 关于从3车线向2车线,车线変更部的车辆优先性
从3车线到2车线,在车线减少的位置第1车线消失,根据第2·3车线做成2车线道路时,从第1车线行驶来的 车辆将优先于第2车线,导致第2车线的交通流下降的现象出现。对此有没有巧妙的处理方法。 -
从3车线变化到2车线,来自外侧第1车线的行驶车辆进入第2车线时,确认了会受到优先待遇。
原则上,判断第1车线的行驶车辆移动到第2车线时,第1车线的车辆变更到第2车线,当判断不能移动时则停止在第1车线内。第1车线的车辆移动到第2车线时,在第2车线遭遇到车辆的话,第2车线的车辆主动回避冲突,直接停止,这种停止如果连续发生便会造成该车线的拥堵。 - 关于区别路线生成交通量向车线的分摊
假设,单向2车线的道路中生成交通量为500台时,一般各车线会按250台均摊分流,如果希望按7:3的比例分流时,该如何设定? -
有以下2个方法。
- 各车线的起点侧连接上匝道,对各车线分别按7:3的比例进行车辆生成。但是,为了对每个车线分别连接匝道,需要调整上匝道的位置。
- 在考虑区间的前面追加车线変更的动作控制点,或者车线的行驶车辆按7:3的比例向相邻车线做变线设定。
这些方法中,2)有可能会在车线変更时出现拥堵。为此类似情况下推荐采用1)的方法。
- 关于交通量的生成方法
以前,关于设个问题,做过基于泊松分布的生成交通量的回答。假设,某时段按3600秒、500/hr生成的情况,具体是如何生成交通的? -
交通流的生成中使用的是泊松分布。泊松分布是按单位时间t内以x表示事件的发生概率。因为是概率,所以平均 值相同的情况下,一定时间内并不代表会生成完全相同的台数。为此,某个时间段很少,某个时间段生成很多,这些都会在画面上有体现。
基本上车辆出现相关的阶段设定,有効行相关输入的时间间隔,是时间台数生成交通量的意思。仅输入1行的情况下与输入的时间无关,按照设定的交通量(台/hr)生成。此设定可进行复数行的输入。
根据设定的位置眼前有伴随信号的交叉口,这么考虑会相对容易理解。原则上此交叉口的信号阶段可以看作是这里输入的时间。例如,某信号的绿灯阶段为30秒、 红灯信号为11秒的情况,交通量500台/hr时,第1行时间->30、交通量->500、第2行 时间->11、交通量->0, 按照以上进行输入。信号的某阶段为3600秒原则上很难得到,请在理解输入项目内容的基础上使用。 - 巴士临时停止后想要再次发车。
-
请按以下顺序设定。
- 巴士模型仅可进行暂停的可动设定。
- 巴士追加到飞行体(行驶车)。
- 动作控制点を设定。
第1行速度0km
第2行指定命令和再开速度
- 为了确认道路的建筑界限4.5m,例如是否有从路面计策对象物的高度的功能等?
-
计测功能仅限模型中心间的水平距离。确认高度等时,需要费一番功夫。
作为确认建筑界限的方法,可以考虑的示例如下所示。- 制作标记了刻度的规定模型,将其移动进确认。
- 制作显示建筑界限范围的模型,通过行驶进行确认。
- 制作显示建筑界限范围的断面,选择表示非表示,根据透过等的使用需要进行确认。
请尝试以上的方法。
- 制作道路断面时,如何才能高效地对树木进行配置?
-
作为[道路附属物]进行配置。但是局限于单一机械的配置,有必要进行个别配置等需要另外下功夫。
- 站前环岛的道路该如何制作。
-
首先,定义大约1周的环绕道路。纵断线形中设定一个方向的断面,返回道路编辑的平面画面。
道路的两端部会显示黄色三角,连接上、下匝道。
由此,完成环绕道路的制作。 - 现在,使用设计前、设计后的切换按钮,可对多个案进行切换显示。
案有4个以上时,可增加模式。 -
[选项]-[景观模型表示]-[景观追加]中包含现在、设计前、设计后,最大可增加到20个模式。
增加部分的景观名称可通过[名称变更]进行切换显示,此外,其状态下配置的模型作为初始值,仅当选中复选框时该 模型才会在景观中显示。
显示切换通过下拉菜单进行切换以外,按下Ctrl + Shift + 数字(2位),再松开Ctrl + Shift,可切换到该数字的景观。 - FORUM8名古屋事务所的示例数据中,请教烟火的处理是如何实现的。
>> FORUM8名古屋事务所示例数据 (UC-win/Road Web Viewer) -
烟花发射过程的图像使用的是数枚板状物体粘贴材质后的3DS模型。通过可动设定,一次进行显示而表现出的烟花效果。
RoadDB中登录了一部分,请确认。
[3D模型的载入]-[下载]-可检索烟花。 - UC-win/Road中可进行录像播放吗?或者可以进行接近录像的播放(11-30frame)吗?
-
录像的播放可以在脚本中进行。(如 Q2-19所示,观赏到的烟花并非动画而是可动模型。)
脚本的[多媒体]-[录像播放]下 《 产品的安装文件夹》Video中指定登录的AVI文件,脚本执行中根据设定的时间进行播放。 - Civil3D制作的数据希望导入到UC-win/Road。该如何操作。
-
通过LandXML格式进行数据的载入、输出,支持地形、平面线形、纵断线形、横断4部分。
Civil3D中选择[输出为LandXML],其数据可以从UC-win/Road的[工具]-[载入 LandXML]进行导入。 - 3车线道路的中央希望指定1车线为公交专用。尤其,希望从道路的起点开始便进行划分。
-
从道路的起点开始,制作巴士专用车线的顺序如下:
- 现在的起点断面左3车线-右3车线,在5m的位置重新设定一次。
- 起点的道路断面重新按左1车线-右3车线制作。
- 5m的位置处因为可以连接上匝道,约5m距离处制作连接上匝道。
- 上匝道设置为左2车线的断面。
- 通过在原有道路中让巴士行驶,上匝道中让一般车辆行驶,实现中央指定车线的巴士行驶。
- 远景的树木希望作为背景进行表现,请说明设定方法。
-
道路平面图中在[背景的定义]中进行设定。
定义线形,定义结束后显示[背景编辑]画面,对高度、材质等进行调整。
背景材质也可以从RoadDB中下载。 - 描画选项中关于太阳、月亮的位置,方位和仰角是朝向什么方向。
-
方位是,正北0度、东90度、南180度、西270度时的角度。
仰角是,水平线为0度时的角度。 - 希望对Road的初始模型进行编辑。该如何操作。
-
Road的初始模型即使保存也不成存为3DS形式,为此不能直接用建模软件进行编辑。为了转换成3DS格式的文件,请使用模型转换工具。
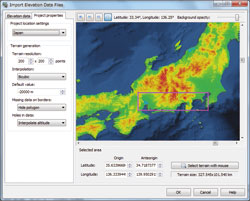
3.地形/街区图/航空图片
- 欲开发2Km×1Km程度的1座山通过VR进行表现。
同时,计划进行航空图片的拍摄、航空测量,作为三维地形数据通过Road进行载入时,需要那种格式的数据。 -
如果是日本国内的山,UC-win/Road中标准附有50m网格标高数据,可作为通常的地形载入对应。
如果是任意的山,需通过xml格式,UC-win/Road可以向外部进行地形数据的处理。关于xml文件格 式,请参考在线帮助[技术笔记]-[关于地形 数据]-[外部地形数据的制作]。因为xml文件本身是文本文件,可通过记事本等进行制作。如果有山体数据的 DXF文件,可通过本公司提供的[UC- win/Road数据变换工具]中的[DXF变换工具]转换成xml形式。
此外,如果有AutoDesk公司的Civil3D,可以与UC-win/Road实现动态地形数据的处理,将Civil3D支持的格式导入到UC-win/Road。 - 任意地形下载入地形补丁数据,希望合成为50m网格地形是否可能。
-
原则上,在任意地形配置的任意地形补丁上无法配置50m网格。但反之则可行。方法记述如下仅供参考。
- 任意地形补丁在地形补丁编辑画面进行保存。此时,地形补丁数据在任何坐标系均可在使用可能 的状态进行输出。
- 输出的xml文件用记事本打开,Origin的位置在Road坐标系的坐标值下进行编辑,可收容载入了结果全点的地形。
- 载入配置地形,配置地形补丁。
根据需要反复对2. 3.项进行操作,有可能需要对位置进行调整。因为地形补丁无法重叠吻合,反复操作时请先删除刚才配置的地形补丁。
- 拥有当前世界测地系的测量坐标,从世界测地系请说明地形补丁XML的制作流程。
-
关于地形补丁XML的制作,可使用记事本等文本编辑器按下述顺序进行制作。再者,坐标值、标高以m为单位输入。
- 下述2行直接追加。
<·xml version=""1.0""·>
<!DOCTYPE UCwinRoadTerrain SYSTEM ""UCwinRoadTerrain.dtd""> - 地形版本,坐标系的设定请按下述追加。
<UCwinRoadTerrain version=""0.*"" coordinateSystem=""*"">
此处,version[0.2]coordinateSystem中输入该测地坐标系的数值。任意坐标系时,设定为[0]。 - 请按下述所示设定原点。
<Origin north=""*****"" east=""*****""/>
此处north、east是从该测地坐标系分别设定坐标的X、Y值。此时的坐标值必须所属在所载入范围内的坐标值。 - 下述格式中分别追加各标高点的标高。
<Point north=""***.**"" east=""**.**""height=""**.**""/>
north、east中分别输入来自3)Origin的相对坐标值。 - 作为结束xml,在最后一行追加下述命令。
</UCwinRoadTerrain> - 任意文件名进行保存。
此时的扩展名为[xml]。
再者,详细在下述帮助中也有记载,请参考。
[技术笔记]-[关于地形数据]-[外部地形数据的制作] - 下述2行直接追加。
- DXF变换后,是否可以变更载入的地形颜色。
-
菜单的[选项]-[描画选项]的[地形]中,根据不同标高可设定地形图像。
- 粘贴200张航空图片,需要多少硬盘容量?
-
因 为容量大小取决于每1枚图片的大小(像素),故此文件容量会有多大无法预测。作为参考, 1100像素的方形图片粘贴约60张左右,Road数据的容量将会超过200MB。其中包含了道路在内。可以处理的文件容量与电脑的内存等有关,故不能一概而论。如果容量过大,可以将像素降低后重新粘贴,达到减小容量的目的。
- 如何提高航空图片的精美程度。
-
主要取决于原始图片,可进行一定程度的优化设定。
选中[载入街区图]的图片品质,航空图片每1枚图片的分辨率为1100×1100像素,视为[标准分辨率度], 达到2000×2000像素左右则视为[高分辨率]。
假设500×500的[低分辨率]图片,选中选项后将会比不选中有一定改善。 - 如果细致调整地形。
-
如果是三维地形数据,通过换工具可对DXF·XML、或者LandXML进行载入。(需要另行工具、选项)
>> UC-win/Road 应用程序/各种工具类
>> UC-win/Road Option
没有这些工具、选项,希望通过手工作业进行部分调整时,可通过地形补丁的制作,追加或移动任意位置的标高点,并设定该标高点的高程,达到地形调整的目的。 - 如何隐藏湖泊的反射。
-
湖泊的反射功能在很多场合被利用,但有时不希望表现反射的话,调整透过率、材质、颜色,可以把反射设定得不显眼。
如果想完全取消反射,可通过制作3DS模型,或者用地形来表现水面等办法。 - 不希望生成填土。
-
[断面编辑]画面中,摘除填土生成的复选框,便不会进行填土的生成。
- 国土地理院的50m网格数据的基础上载入SIMA数据时(合并载入),保持坐标值一致该如何处理。
-
SIMA数据变换工具所输出的文件(*.rd)的区画如果与50m网格的区画相同,可通过合并的行驶载入。 顺序如下。
- SIMA数据读入前,通过工具内的[编辑]-[地形数据的设定]将左下的坐标值、地形的范围与50m网格的范围吻合(此时设定的坐标系为0:任意坐标系即可)。
- SIMA数据载入后、输出为RD文件。
- UC-win/Road中载入同上地域。
- 与工具所输出的RD文件合并。
※进行合并时,坐标系、区划范围如不吻合则会报错。
- 世界测地系的原点在哪里。
-
现在世界测地系分为19个坐标系区分。其中每个坐标系都设有原点。
福井县因为所属第6坐标系,其原点是北纬36度、东经136度。 - 比20km×20km更大范围的区划无法设定吗。
-
UC-win/Road可以制作的空间最大为20km×20km。即将预定发布的新一代产品[VR-Studio®]中则可对应更大空间。
- 听说因为UC-win/Road的限制地形补丁只能对应2000点,相当低。
-
地形补丁可以读取更多顶点。曾在某项数据中读取过20万个点。
4.3D模型
- 3DMAX制作的模型导入UC-win/Road的方法?
-
3DMAX中将制作的模型保存为3ds格式,在[模型的编辑]画面,可将该文件导入到UC-win/Road。
- 请说明关于MD3特征人物的制作方法。
-
请参考下述资料。
MD3特征人物(运动捕捉的制作方法) (PDF形式 16页面 813KB)
示例动画(AVI格式 663KB 0:09) - 用AutoCAD制作成的三维数据可以在UC-win/Road上进行导入吗?
-
使用UC-win/Road DWG工具选项(付费插件)就可以进行去导入。
通过导出[3D模型],从以[三维空间面][区域][填充][网格][Surface][Object]所构成 的三维CAD文件导入面作为模型进行登录。 - 用UC-1软件进行设计讨论后的模型可以在UC-win/Road上进行导入吗?
-
运用以下方法可以进行导入。
- UC-1产品的画面中右击模型→选择[输出文件]→选择3ds文件形式,然后登录模型
- 从UC-win/Road的[模型编辑]画面导入登录后的文件
5.交通流模拟
- 路线A上以60km时速行驶所生成的交通流,在某地点的交叉口左转,改为时速40km行驶在路线B,该如何对其车辆输入信息。
-
在交叉口向路线B左转后,在达到初始速度(此时的时速60km)之前保持加速。此时,为了在交差点左转后其交通速度变为时速40km,在道路B上进入交叉口的位置设置に动作控制点,将通过该点的交通速度设定为时速40km。动作控制点在道路平面图的路线上点右键,弹 出菜单中选择[追加]-[动作控制点]进行配置,同样可通过[编辑]按钮进行编辑す。
- 交叉口的通过速度根据路线不同而有所不同吗。
-
交通流的速度由初始速度得到,之后根据交通状况、车的重量各自有所变化。由此,交叉口的通过速度与路线无关,而是根据每台车辆的不同有所差异。
- 根据纵断面坡度等,无需输入动作控制点也会对速度产生变化影响吗。
-
速度考虑了重力和车全体所具有的各种抵抗。由此,纵断面坡度变化会对速度变化产生印象。如果是乘入客舱的状态,上坡时如果不踩油门,将会减速直至停止。
- 关于交通量的生成方法,在模拟上是如何考虑的,是否有交通量生成。
-
交通量的生成方法
从A路线的起点方向生成1100台/时的交通量,上流阶段为[1个]的时候,[时间可按3600secs、交通量可按1100/hr。 上流阶段的[时间]是指[交通流生成的时间],设定了复数个的话,例如设定了3个阶段[A:30secs、 B:50secs、C: 20secs]的时候,A在30秒生成后,接下来按B生成50秒、最后是C生成20秒,然后再按照[A → B → C]的顺序循环。为此,[时间]按照复数个阶段设定的情况下,有其意义,只有1个阶段时其设定没有特殊意义ん。
再者,此考虑方法是假设在道路端部有交叉口的情况,进入该路线的交通流根据信号考虑其连续性变化,根据时间、交通流(单位时间的生成台数)及车辆配置文件(车辆的种类和比例)可做相应变更。 - 关于高速生成
高速生成所生成的交通量,在有复数个路线的情况,向各路线的交通流分配是如何处理的。 画面所表示的通量是表现什么的交通量。 -
通过高速生成所生成的通量,在有复数个路线的情况下根据各路线设定的交通量进行分配。
画面所显示的交通量是所有线路中再生车辆数的合计。 - 希望进行交通流的重置,再哪里可进行设定。
-
交通生成按钮的右侧,有交通流的暂停按钮,再右边的便是重置按钮。需要将交通流清零时,请按下此按钮。
- 输入现状交通量和现状信号周期,可重现现状拥堵吗。
-
可以。同时还有拥堵模拟的实绩。
本公司主页中看在有相关事例,敬请参照。
[UC-win/Road交通模拟应用事例
■伴随大规模集客施设的建设交通需要的增加所导致拥堵发生的模拟] - 沿某道路,新建开店的大型CS向道路驶入车辆的表现(模拟)是否可以实现。(空闲状态的道路中,来自CS的车辆驶入道路的情况,以及拥堵滞留时来自CS的车辆流入导入等情况)
-
可以。
在大型CS停车场出入口的位置制作交叉口,交叉口的编辑中将前面道路设定为优先道路(通往停车场的道路为[让路])。有信号的时候理所当然进行信号控制设定。
设定交通量等,实施模拟。
进行简易表现的话,无需制作交叉口,在停车场出入口附近追加任意交通流点,在此点进行交通流的发生、消失的设定,同样可达到类似的模拟效果。
6.产品全般
- UC-win/Road的产品构成中有哪些版本?
-
有[Standard][Advanced][Driving Sim][Ultimate]这四种版本。 [Advanced]中附带很多可与其他工具进行连接的单卖插件。[Driving Sim]对应高度的驾驶模拟。
- 有举办产品的相关培训会吗?
-
以VR数据制作实务、基于VR的道路设计/城市建设体验为首,随时举办以3D打印机、可佩戴终端等与VR的合作为主题的培训会等。
相关培训会详情:https://www.forum8.co.jp/chinese/fair-cn-4.htm - 有演讲时专用的产品吗?
-
本公司有提供演讲专用的版本。[Presentation Version]是跟正规的许可证一样可以利用各种演讲功能。
- 保存的数据是否可通过Trial版载入,请说明方法。
( >> Trial version下载 ) -
Traial版是购买前用于试用的产品。仅限于实现制作好的限定数据,一般正式版制作的数据无法载入。
- 本软件进行模拟结果等,是否在日本国土交通省、或都道府县等的行政机关有使用实绩?
如果有的话,请给出实绩列表。 -
行政机关的实绩暂时无法提供列表,在本公司主页的竞赛回顾中也看在了行政机关相关的许多作品,请参照。
>> UC-win/Road 视频·走廊 → 3D·VR模拟竞赛回顾
此外,作为先进项目利用UC-win/Road的事例,下述网站也有相应刊载。
>> Advanced Project 先进项目事例介绍杂志[桥梁与都市项目] - 想要程序的演示。
-
请利用以下联系方式进行申请。
正在实施指导员针对3D图面・VR、各种分析・模拟的活用提案・支持。销售窗口(免费电话):0120-1888-58
- 想要体验驾驶模拟器系统。
-
东京总公司的Showroom里有6轴驾驶模拟器、7画面驾驶模拟器等,可以体验各种类型的模拟器。
请参照以下联系方式进行咨询・申请。销售窗口(免费电话):0120-1888-58
销售咨询窗口:https://www.forum8.co.jp/chinese/taiken-cn.htm


LOADING
-