| UC-win/Road模型VR系统 |
|
| 通过模型与VR的连接进行模拟演示的系统 |
| 提案系统 发布●2011年 | Simulation |
| New Products | |||||||
|
|||||||
|
在专业性和知识水平点上,相对各种各样的多重相关人员可通俗易懂地传递信息,促使规划讨论、共识达成的高效推进
。 |
| 具备模型和VR长处结合的讨论工具 |
|
VR具备高度的灵活性和表现力,在交通流的表现、天气条件的变更等可进行模型无法实现的各类讨论。另一方面,距离、规模等在规划整体把握方面,模型有更有直感。模型中复数的人可以同时从任意视点进行讨论,便于一次性把握城市整体,讨论者可以直接接触也是模型的长处所在。 UC-win/Road模型VR系统通过将模型和VR组合,与VR单体时相比较规划讨论变得更加直感且操作容易。此外,只要应用本公司推广中的[3D模型服务],UC-win/Road的VR数据可从3D打印机作为模型在段时间内输出,可有效地构筑模型VR系统
。 |
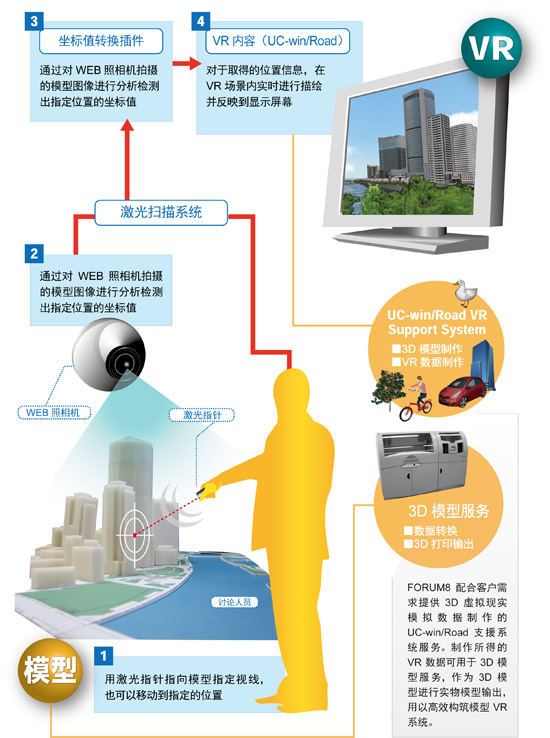
| 模型上指定希望讨论的视点在VR上描绘 |
|
[UC-win/Road模型VR系统]中使用激光指针通过对模型指向希望讨论的视点,可变更VR空间内的移动及视线方向。 整体由系统模型、Web照相机、激光指针、VR软件[UC-win/Road],显示VR空间的播放器构成,通过激光指针的操作检测出位置,并将检出到的信息传递到UC-win/Road反应到VR空间。 FORUM8结合用户的需求提出了UC-win/Road模型VR系统的提案,敬请利用。 。
|
||||||||||||||||||||||||
| (Up&Coming '11 新春号刊载) | ||
 |