支援道路工程、公共工程等專案提案溝通的3D即時VR軟體
International Version(對應語言:日文、英文、繁中、簡中、韓文、義文、德文)
UC-win/Road Ver.17
初版發佈:2000.05.09/最新Ver.發佈:2023.07.07
- Ultimate
- Driving Sim
- Advanced
- Standard
- CIM Lite
- Multi User Client Version
- Presentation Version
- Cluster Client Version
- Free Viewer Version
程式簡介 >> Ver.17 新功能詳情 NEW!
3D即時虛擬實境軟體UC-win/Road
於2002年獲得日本經濟產業部補助設計軟體產品年度大獎,透過簡單的電腦操作即可完成各種專案的3D大規模空間製作。
作為一款可進行各種即時演示的先進軟體,其靈活的開發環境適用於高端系統開發。
-
標準資料/CAD資料的應用
-
- 搭載新西蘭的50m網格標高地形
- 搭載全球[CGIAR-CSI SRTM 90m Database]中國和澳大利亞地形
- 對應SRTM(90m網格)、ASTER(30m網格)
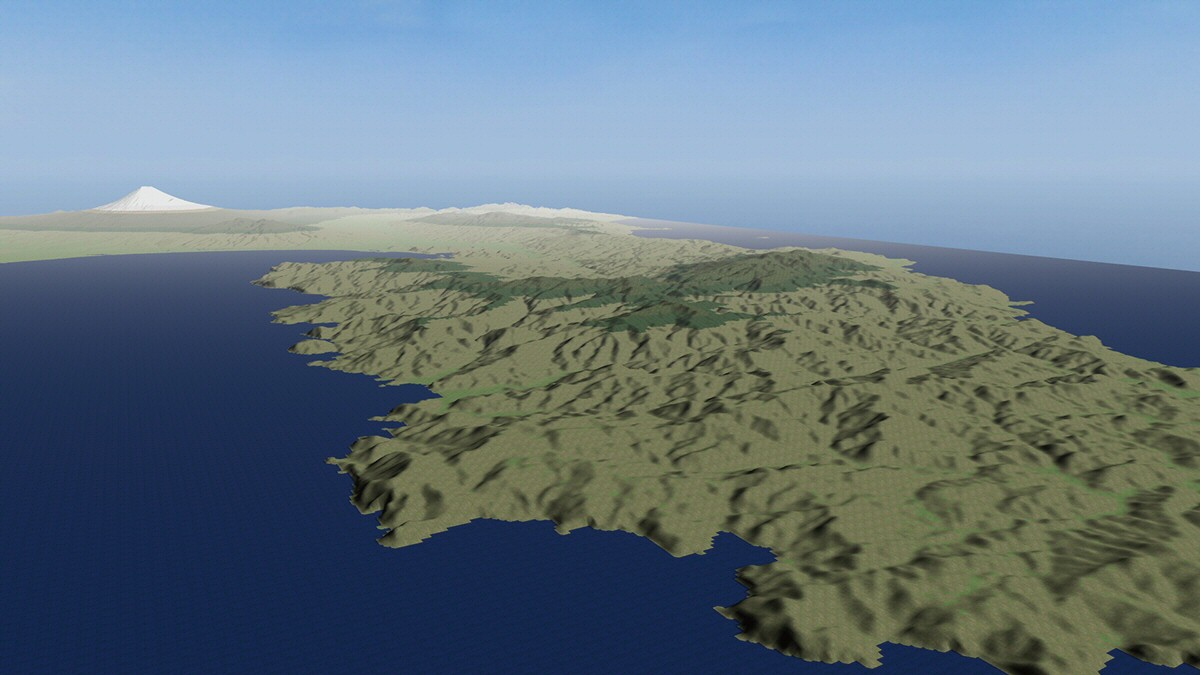
- BlueMarbleNextGeneration(500m網格)(對應海底地形)
- 世界測地變換工具認證:(國地企調發第603號)
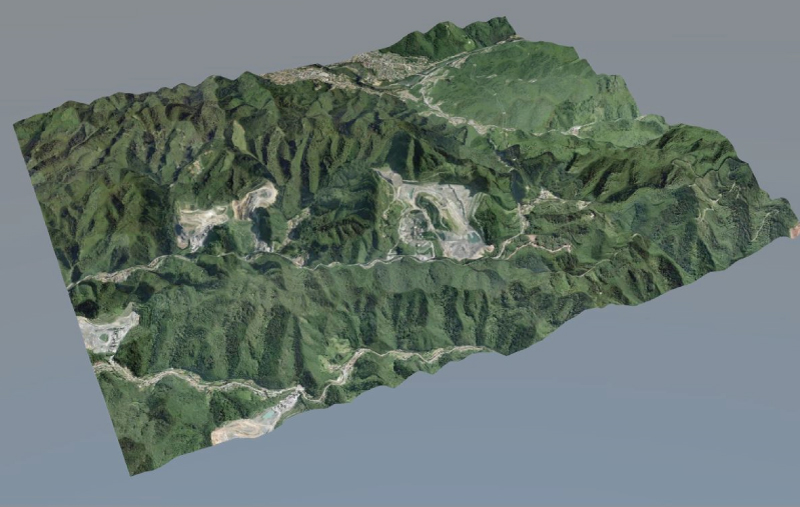
- 支援生成指定解析度的高精度地形
-
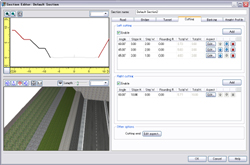
簡單精緻地完成複雜的道路結構
-
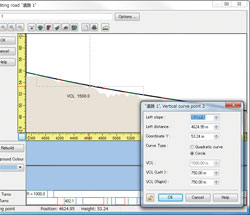
透過輸入線型參數可以自動生成道路、隧道、橋樑、河流、步行路徑。
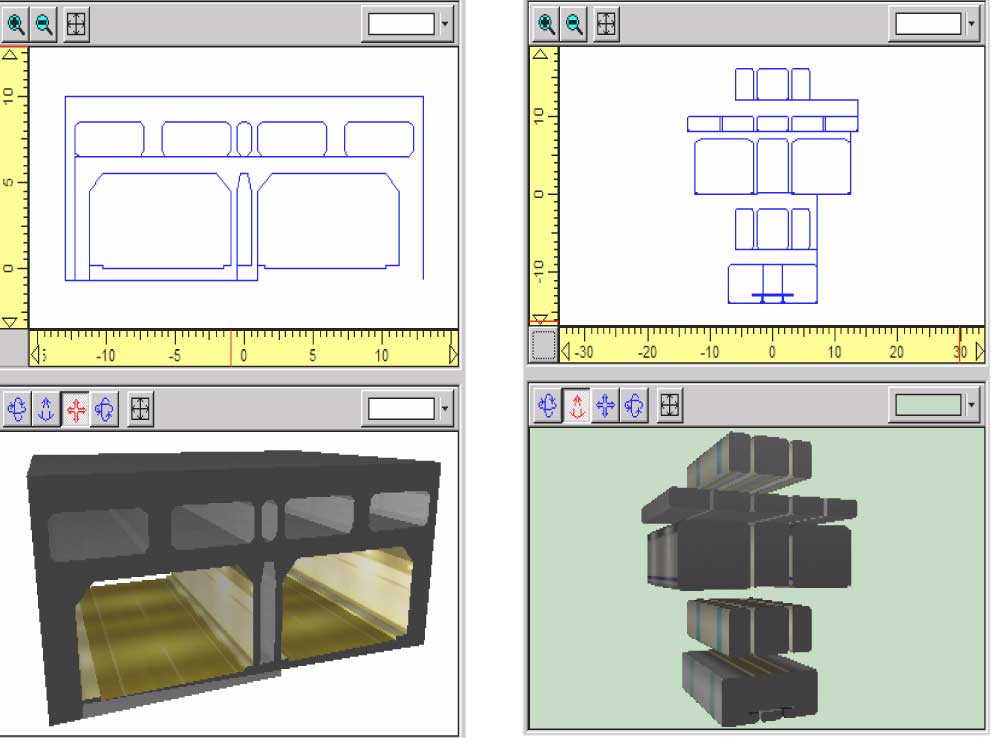
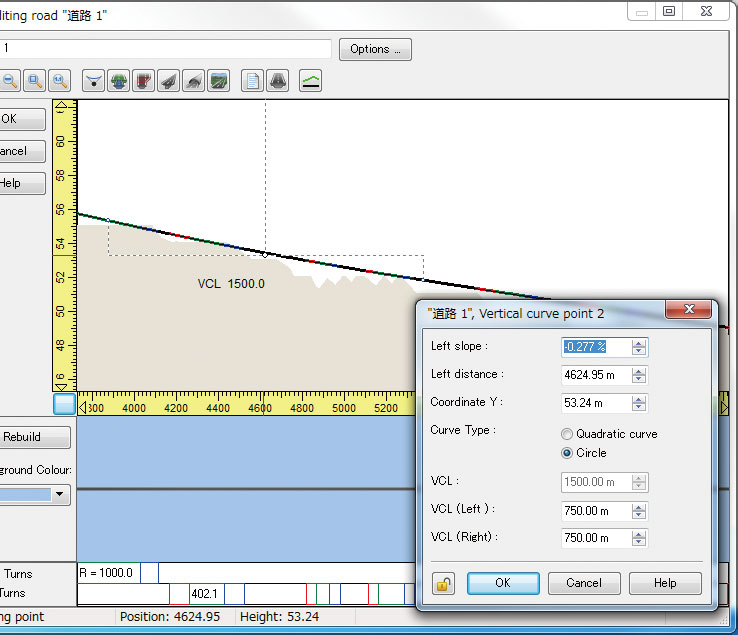
透過定義道路平面線型(對應緩和曲線、單曲線)、縱斷線型,可以設置隧道、橋樑區間。斷面定義還可處理體現落石台在內的填挖方邊坡。可以透過線型、斷面功能簡單地作成複雜的道路結構。




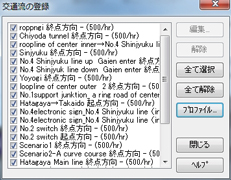
交通流的內部生成
支援設置Traffic Generators(生成交通)/Flow(交通流)車輛種類占比、交通量並生成交通流,以及控制指定車輛進行互動式交通模擬。


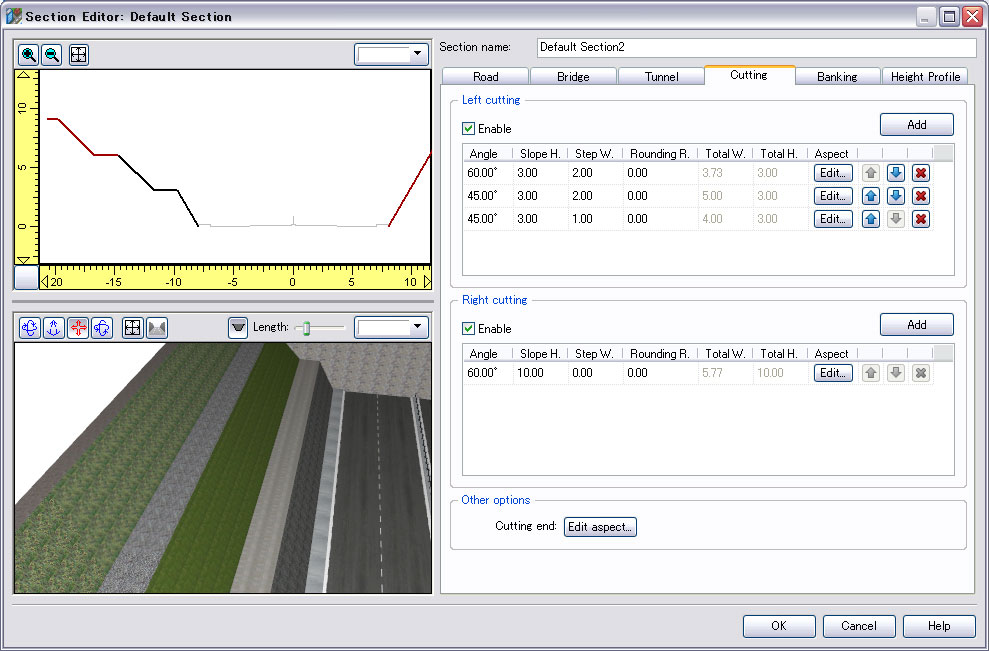
填方、挖方、邊坡、台階的圓滑處理
支援同時設置左右方填挖方邊坡的寬度、角度和材質,並且支援台階的圓滑處理。

-
各種資料連接
-
對應IFC・Shape・LandXML・DWG等格式資料,透過連接各種資料使其三維工程應用平台的功能無線延伸。
●IFC的資料連接
●道路CAD的資料連接
・UC-win/Road for Civil 3D
・UC-win/Road 資料轉換外掛程式 for APS-Win
・UC-win/Road for 12d Model
・UC-win/Road OHPASS外掛程式選項
●UC-1設計系列的資料連接
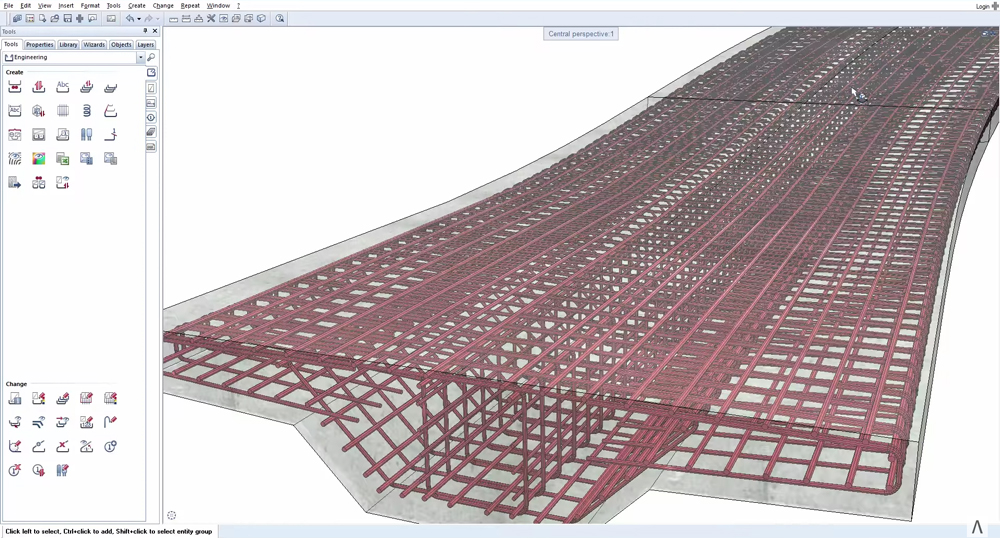
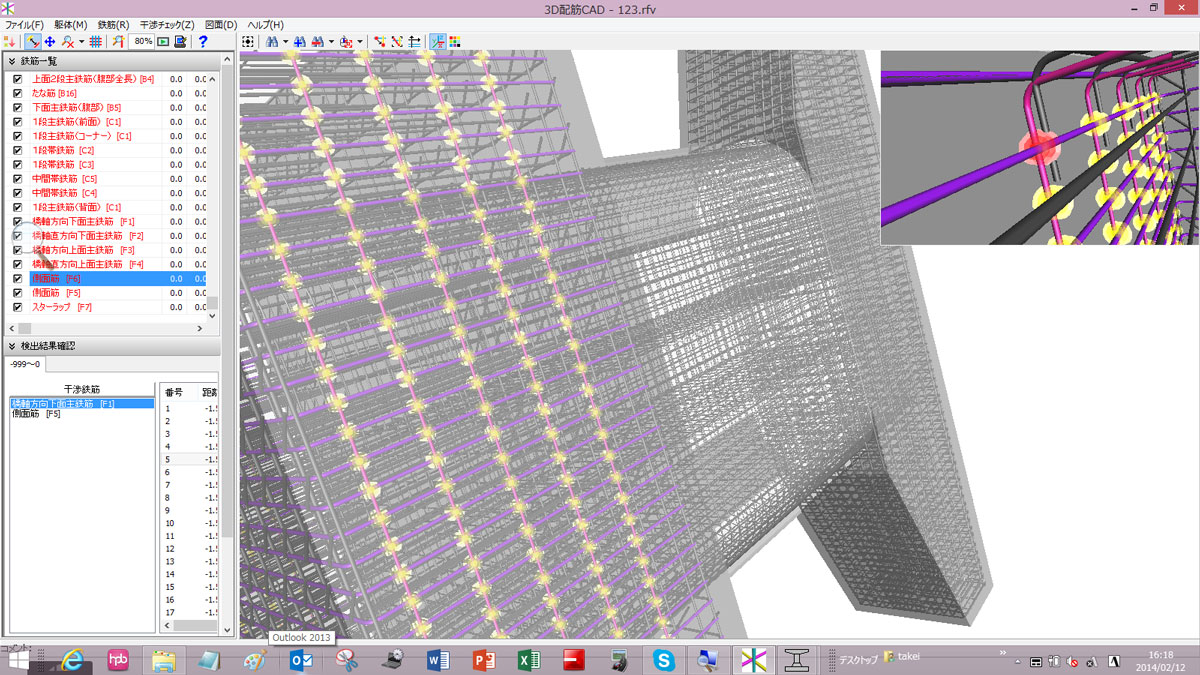
・3D配筋模擬
・3D配筋CAD for SaaS
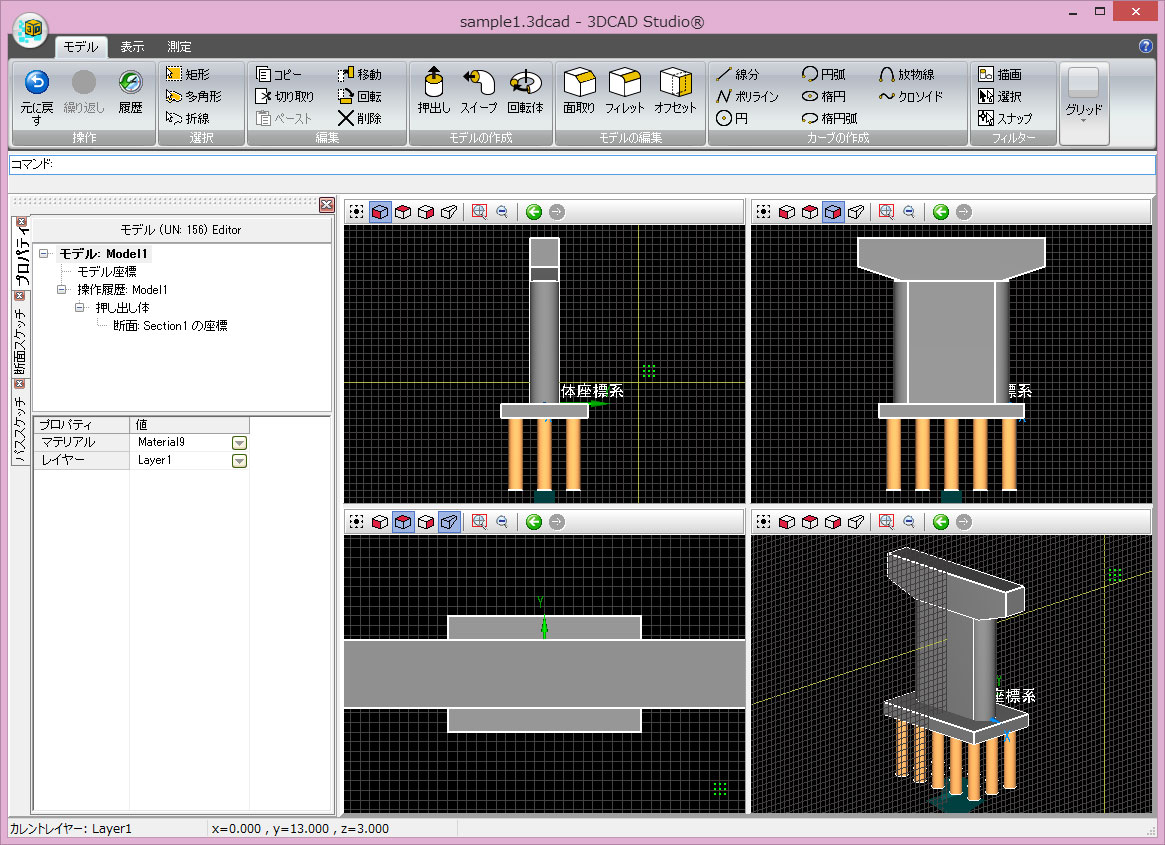
・3DCAD Studio®
●交通AP的資料連接
・OSCADY PRO ・TRANSYT
・Aimsun ・VISSIM
・S-PARAMICS ・TRACKS
・SIDRA
●分析結果的資料連接
・UC-win/Road for EXODUS
・UC-win/Road for xpswmm
●GIS的資料連接
・UC-win/Road for GIS
●3DCAD資料的連接
・Shade3D
・Allplan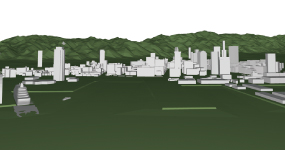
▲UC-win/Road→IFC

▲DWG輸出結果

▲UC-win/Road

-
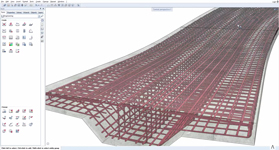
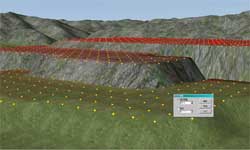
大規模空間的即時渲染
-
對應64位元系統,小至1釐米的骰子,大到數百公里的道路結構,均可在同一空間內完成。
可平滑處理廣闊的地形和高清模型,並且LOD功能還支援動態顯示。


透過Visual Options Tool 進行各種顯示。並可進行道路障礙的交通模擬。
可即時地控制時間、天氣、燈光等。透過人造燈光功能還可進行晝夜間和影子投影的表現。對基於交通量、車輛分佈屬性、號誌設置的交通流生成、災害、事故所導致的道路通行障礙也可進行模擬。










透過簡單的PC操作實現自由即時的VR。豐富的功能可以支援產品演示的各種需求。
各種駕駛模擬
支援各種駕駛模式(車速、車道變更、視點高度、8方向的視點切換)、視點的移動(他車視點、視點上下、轉向)。支援移動路線、飛行路線的設置(支援在3D畫面中編輯)。支援使用3D駕駛艙和多面顯示器以進行更高級的駕駛模擬。
Before/After的場景切換
設計前和設計後的對比,最多支援設置20種場景並切換顯示不同的模型、標誌、樹木等設計效果。


場景
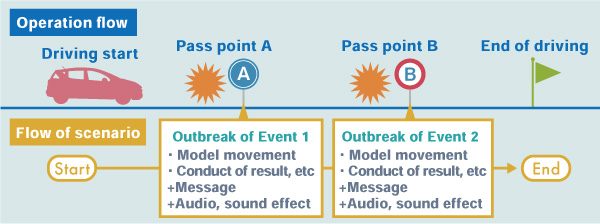
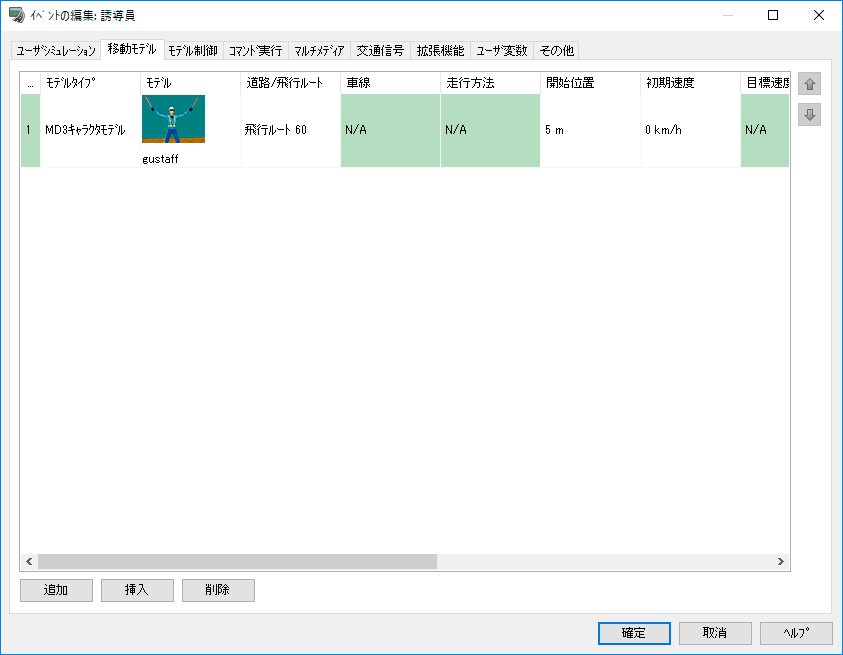
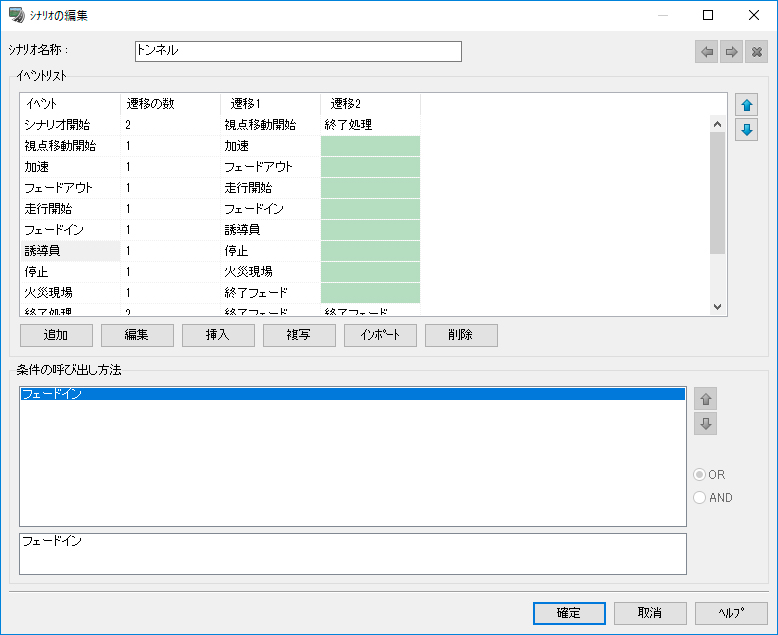
在模型中設置各種指定的動作。透過在場景中設置現實中可能發生的事件和想要測試的條件,可以有效地實現創建VR場景的初衷。



簡單且詳細的設置方式
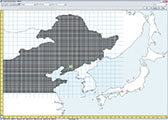
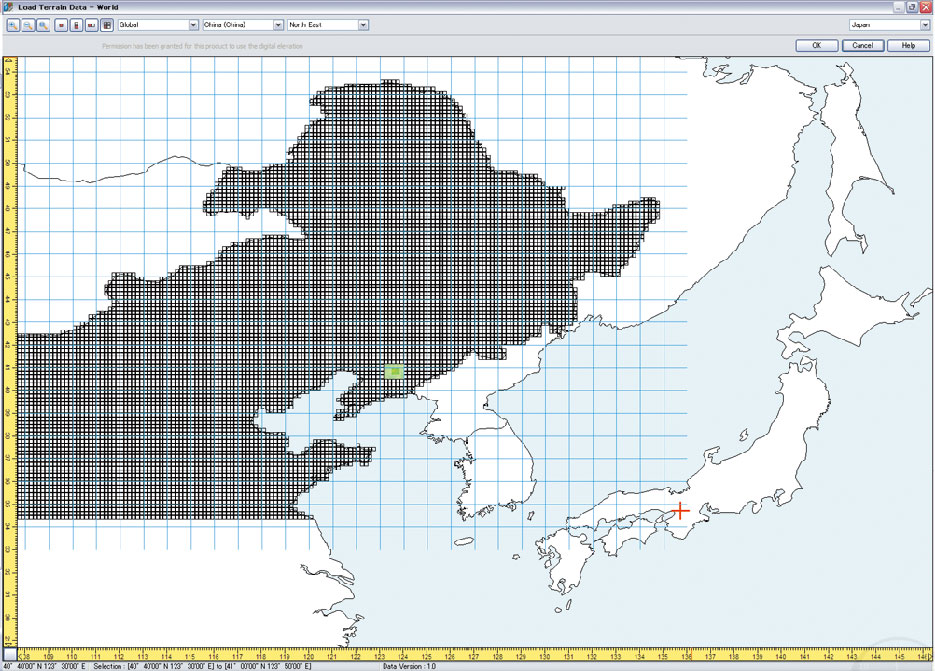
●搭載標準地形、地圖資料庫
●支援任意地形、世界測地系的轉換
●支援航空圖片的粘貼、DXF-XML轉換、3D、2D地形的編輯功能
●支援Shape、IFC、DWG等CAD和3D/2D間的資料轉換
日本國土地理院地圖
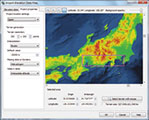
搭載日本國土地理院地圖:50m網格標高(全日本)/2500空間基盤(東京/大阪)日本國土地理院認可(2000年總使、第173號)、同時支援5m/10m網格
對應全球地形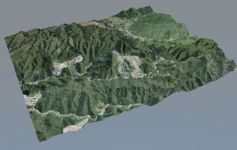
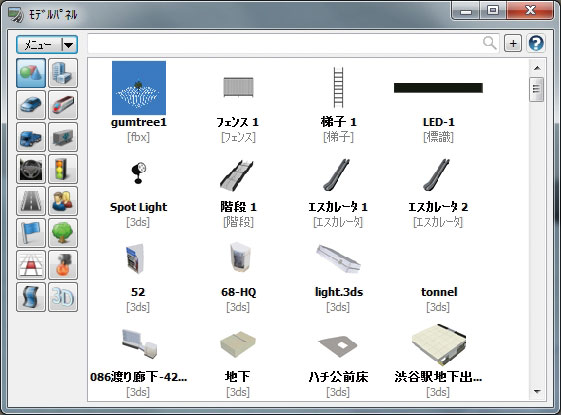
透過標準模型/材質等豐富的下載資料庫,有效地支援VR資料製作
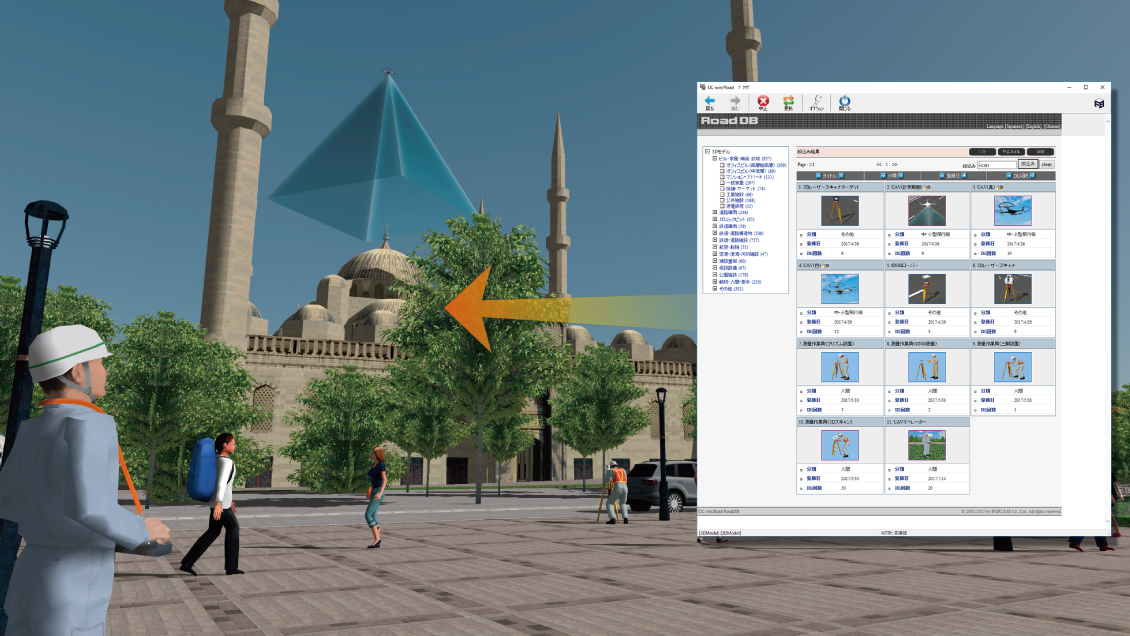
除3D模型·材質等標準資料外,可直接利用網際網路的UC-win/RoadDB下載豐富的素材。同時還準備了方便的編輯·移動工具,可對模型進行縮放、移動、旋轉、傾斜和配置。透過動作設置可動模型,還可控制模型的動作。此外還支援創建可以輸入參數的標牌、樓梯、自動扶梯和圍欄。




















TOPICS/相關資訊
-
UC-win/Road TOPICS
-
- TOPICS
- UC-win/Road
Ver.12取得PSQ認證
~確保系統開發基礎架構的高度可靠性,擴大對政府系統開發專案的需求~ (2017/07/07)

● 第8屆 CSAJ 聯盟大獎 特別獎獲獎! 榮獲經濟產業大臣獎!
~透過UC-win/Road對開放資料的連接加速各種技術和領域之間的連接~● 第8屆 CSAJ 聯盟大獎 特別獎獲獎! >獲獎產品:UC-win/Road for SaaS(現VR-Cloud®)
社團法人 電腦軟體協會主辦。 http://www.csaj.jp/
提攜實績、預定、商談件數及將來性・市場性・技術性等綜合評價後授予的獎項。● 建設技術展近幾2003[注目技術獎]獲獎! 
● Software·Product·of·The·Year 2002獲獎! [生活/生活領域]
(財)軟體資訊中心(SOFTIC)http://www.softic.or.jp實施的優良軟體·產品
(2002年共4個領域)表彰制度。UC-win/Road Ver.14合格透過OCF鑒定的[LandXML格式3維設計資料對應鑒定]
UC-win/Road Ver.14合格透過OCF鑒定的[LandXML格式3維設計資料對應鑒定]。
(OCF:OPEN CAD格式評議會http://www.ocf.or.jp/)

UC-win/Road Ver.12取得PSQ認證
FORUM8於2017年 6月 28日,UC-win/Road Ver.12 取得基於PSQ標準的認證。
最新資訊
-
相關資訊
-
- ◆最新資訊
- VR Design Studio UC-win/Road Ver.15發佈('20.02.01)
- VR Design Studio UC-win/Road Ver.14發佈('19.11.05)
- UC-win/Road Ver.12取得PSQ認證('17.07.07)
- ◆相關產品
- UC-win/Road支援系統
- 3D・VR資料製作服務
- ◆影片庫/競賽
- UC-win/Road的運用案例影片庫
- CPWC學生競賽影片/VDWC學生競賽影片
相關資訊
UC-win/Road Ver.17 新功能
・相關資訊 UC-win/Road Ver.17(Up&Coming 』23 春季刊)
●CityGML數據導出功能
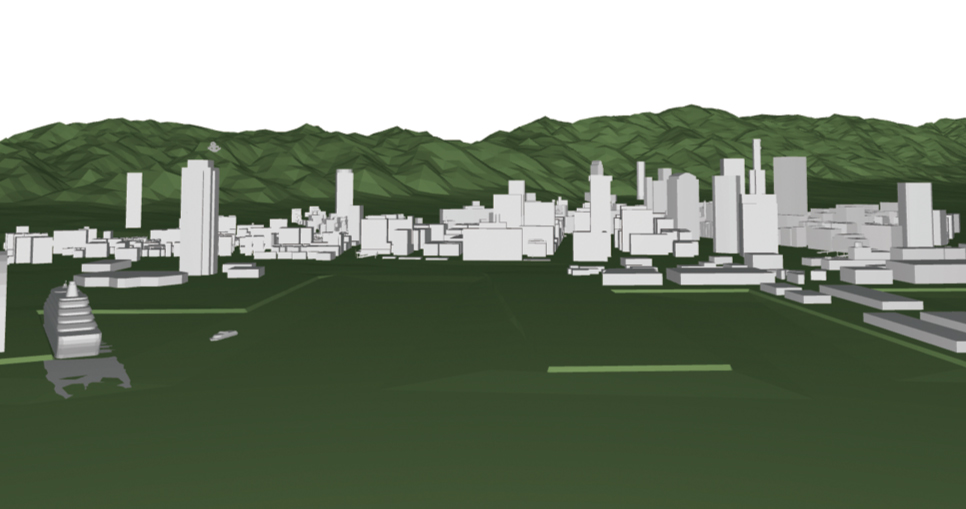
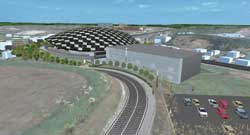
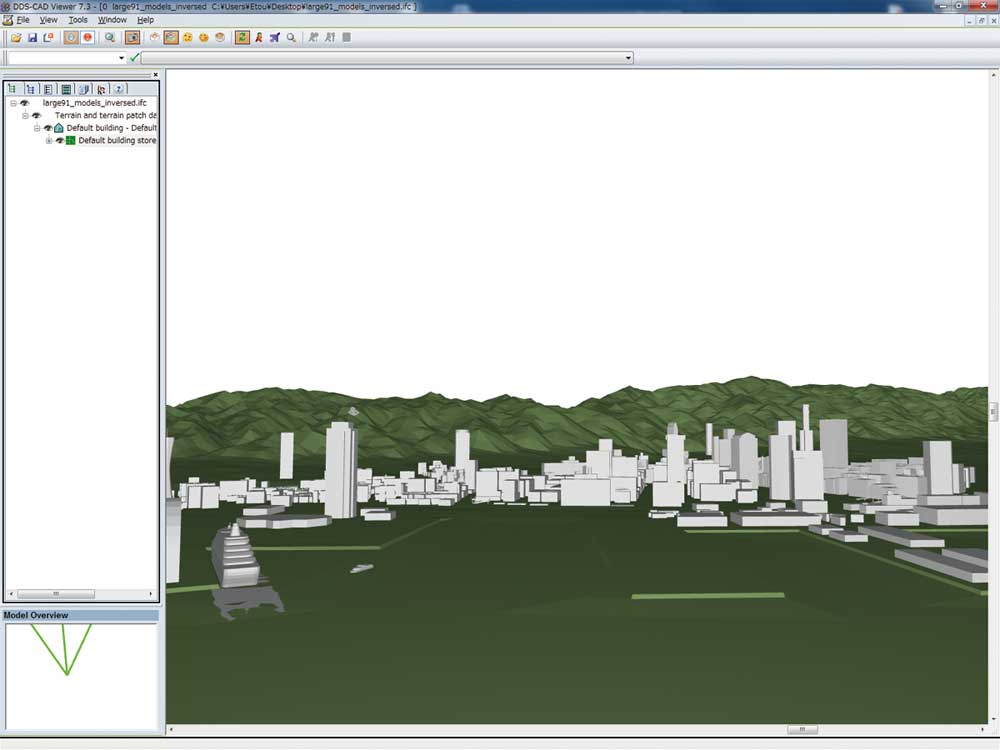
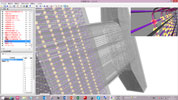
以UC-win/Road為平台,可製作、編輯城市模型,並從UC-win/Road輸出城市模型。 包括LOD1-2建築模型和LOD1等級的道路、地形模型。 當從PLATEAU讀入CityGML時,CityGML資料可以連同其包含的資訊一起重新匯出,除已更改的區域外,盡可能再現原始資訊。


UC-win/Road的都市模型數據
在查看器中顯示UC-win/Road輸出的CityGML範例。
●支援洪水導航數據的導入
海嘯插件海嘯插件從國土交通省的洪水導航下載洪水數據,利用洪水導航的數據在UC-win/Road上進行洪水可視化模擬。利用海嘯插件功能,可確認水位隨時間的變化,並透過梯度視覺化表現出真實的水面。
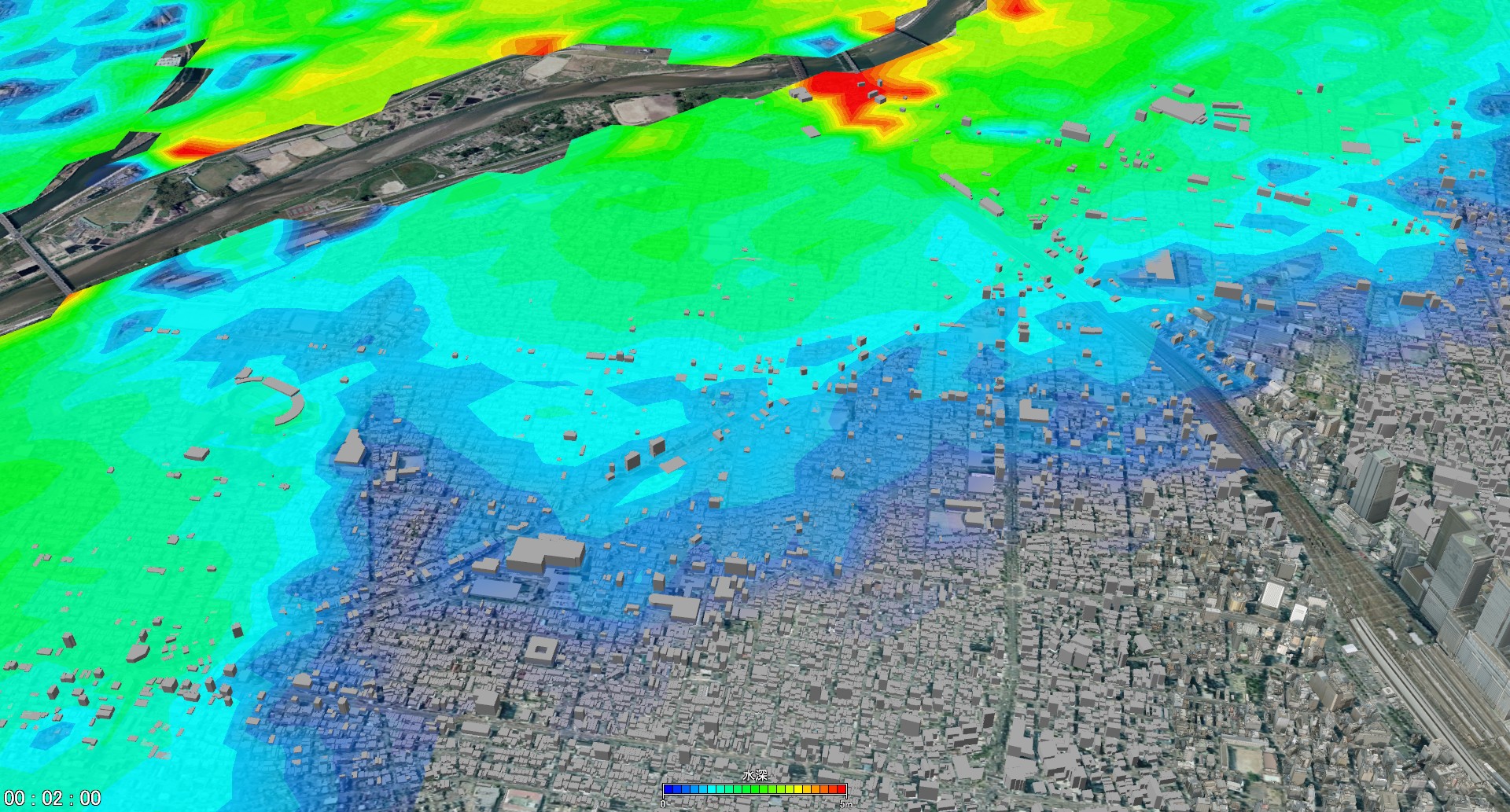
使用UC-win/Road載入洪水導航資料的模擬範例。
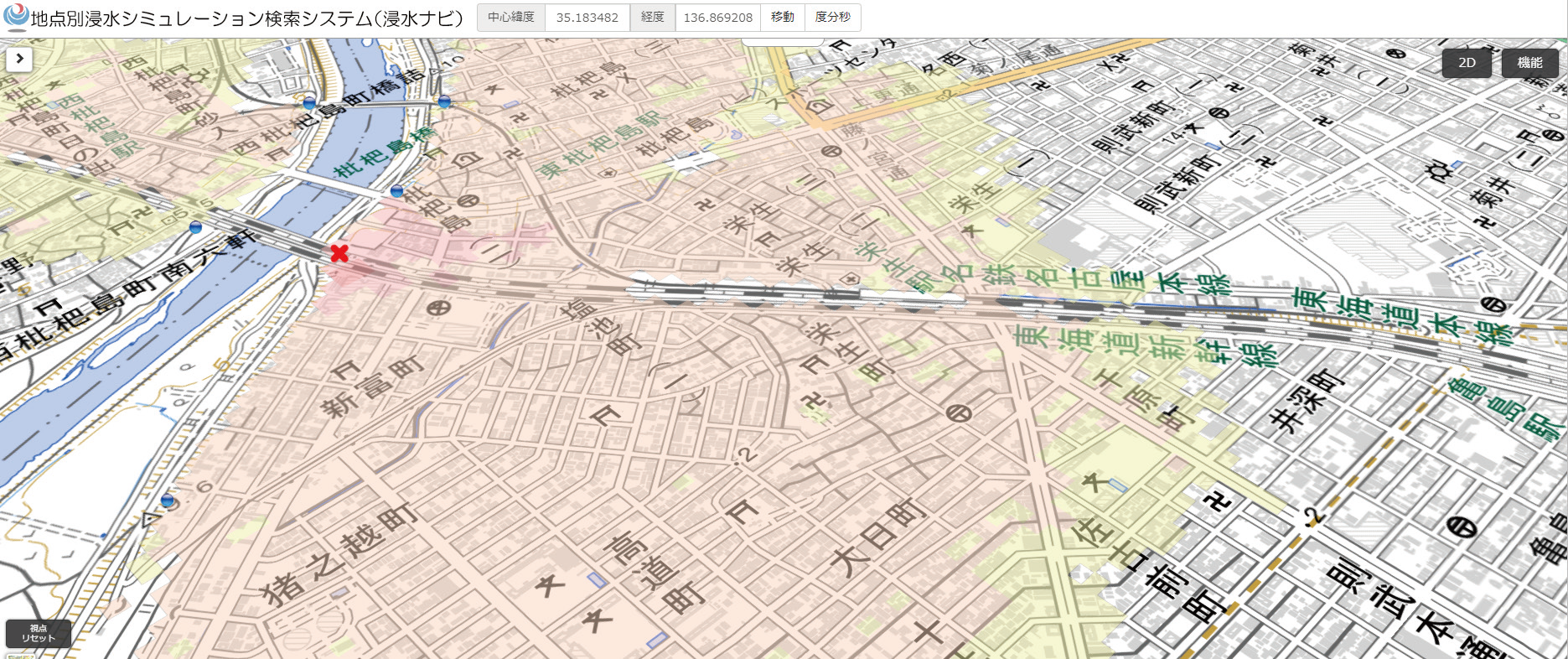
國土交通省 在洪水導航系統中顯示動畫。
●VISSIM連攜
- 對應VISSIM 2023 連攜。
- VISSIM TCP 連攜功能
即使 UC-win/Road 和 VISSIM 安裝在不同的 PC 上,也可實現連線。 - 對應VISSIM多用户
當建立群組連線並執行 VISSIM 連線時,多用戶客戶端操作的車輛也會被傳送到 VISSIM。


▲在 VR 中加載 VISSIM 的車輛和行人流分析案例研究(第 21 屆 3D/VR 模擬競賽獲獎者)。
「本厚木站地區交通再現的 VR 模擬。」株式會社東方諮詢)
●對應Python 介面(COM API)
Python API是透過COM存取UC-win/Road主要功能的API。 它提供了對駕駛模擬器控制、模型/角色即時控制、主螢幕視角控制、功能區選單項目和按鈕等功能的存取。
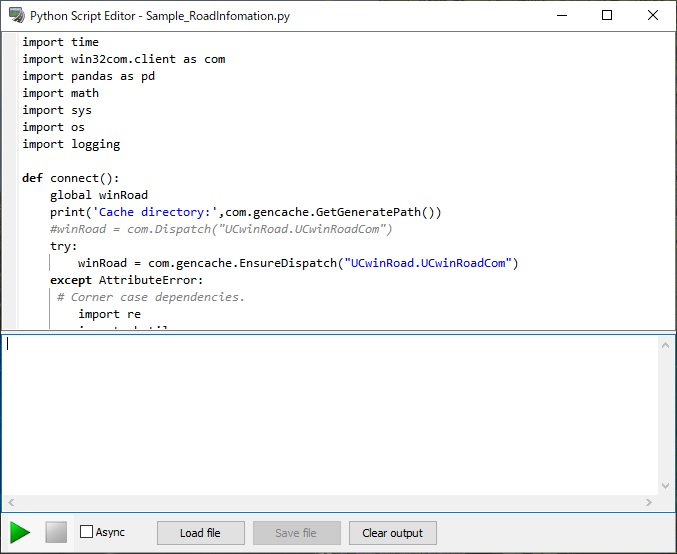
腳本編輯畫面
●道路編輯功能的改善
還增加了其他功能,使道路建模更有效率。
-
現在最多可以撤銷 10 個操作。 此外,還支援重做功能,可以恢復先前無法進行的編輯操作。 - 道路線性的保存・讀取功能
在平面編輯介面上,現在可以使用道路線的匯出/匯入和複製/貼上功能。 由於道路橫截面和路面紋理會與路線一起保存,因此可以精確再現道路輪廓和材質。 - 道路的起點・終點變更功能
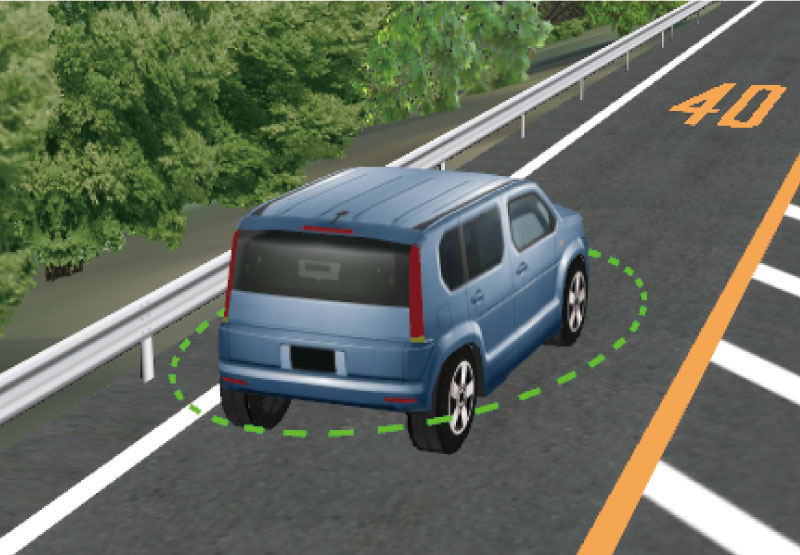
●LKA功能
現在支援表示車道偏離預防系統運動的功能。 系統會計算車道偏離量,並根據偏離量和速度,計算施加在方向盤上的力和轉向修正量。 方向盤上的反作用力會反映在支援力回饋的遊戲控制器和支援扭力控制的各種駕駛模擬器硬體上。 此外,還可以在車輛偏離車道時播放設定的警告聲。 如果該功能與外部系統連接,就可以即時取得該功能的計算結果。 這可用於研究和開發與 LKA 功能相關的人機介面和道路安全。

LKA功能
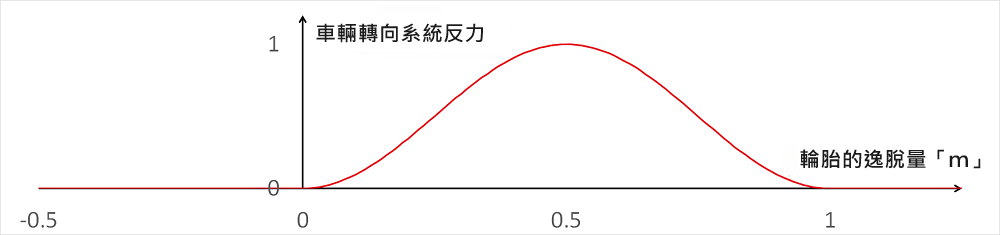
LKA動作參數調整
程式的功能和特點
-
計畫/設計
-
- 搭載紐西蘭的50m網格標高。
- 獲得了全球[CGIAR-CSI SRTM 90m
Database]的使用許可
搭載了中國與澳州地形資料。 - SRTM(90m網格)、ASTER(30m網格)
- BlueMarbleNextGeneration (500m網格)(也對應海底地形)
- 指定解析度生成高精細地形
- 對應超過110km的大規模地形生成
- 導入(3D、2D):道路斷面、模型
- 匯出:分類(模型、線形、地形等)、整體
●國土地理院數值地圖
50m網格(標高)(承認號碼:平12總使、第173號)標準搭載。 5m網格(標高)對應
●對應全球地形
▲對應海底地形
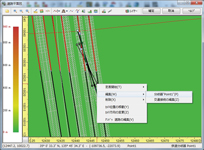
●線性參數取得功能
根據GPS等獲得的點序列自動計算道路的IP點曲線參數。

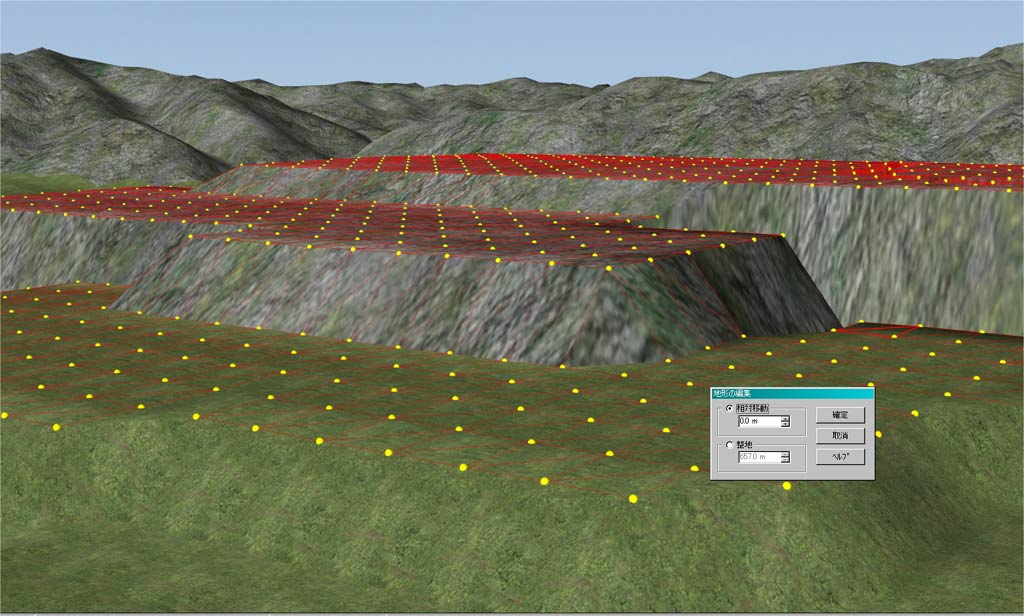
●地形整地/批量處理
對應地形的上升下降、整平。透過道路生成的填挖方土處理、對應地形吻合處理。
▲地形指令整地處理

●鐵道線形
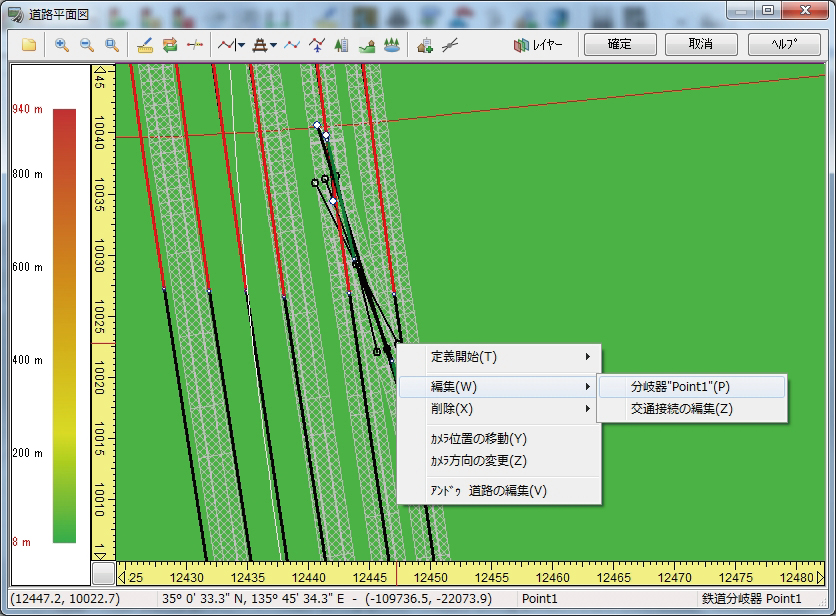
支援測量中心線、結構物中心線、緩和曲線、縱斷曲線、衰德、分歧器等描繪。討應橫跨多條接續軌道的直通行駛。
緩和曲線:克羅梭、三次拋物線、正弦半波長度曲線
縱斷曲線:二次拋物線、圓曲線

●河流、道路斷面
對應河流的平面和縱斷面線形設置。

●橫斷面透過
斷面編輯中可指定各組成部分的透過率。也可快速製作透光板等透明、半透明消音壁、高欄等等表現。

●填挖方更新和小段圓滑功能
可以設置挖方/填方方式,可自由設置各段左右的小段幅度、法面角度、使用材質。設置在各標籤中進行。另外、透過輸入行的編輯按鈕可設定各段的斜面、小段材質。
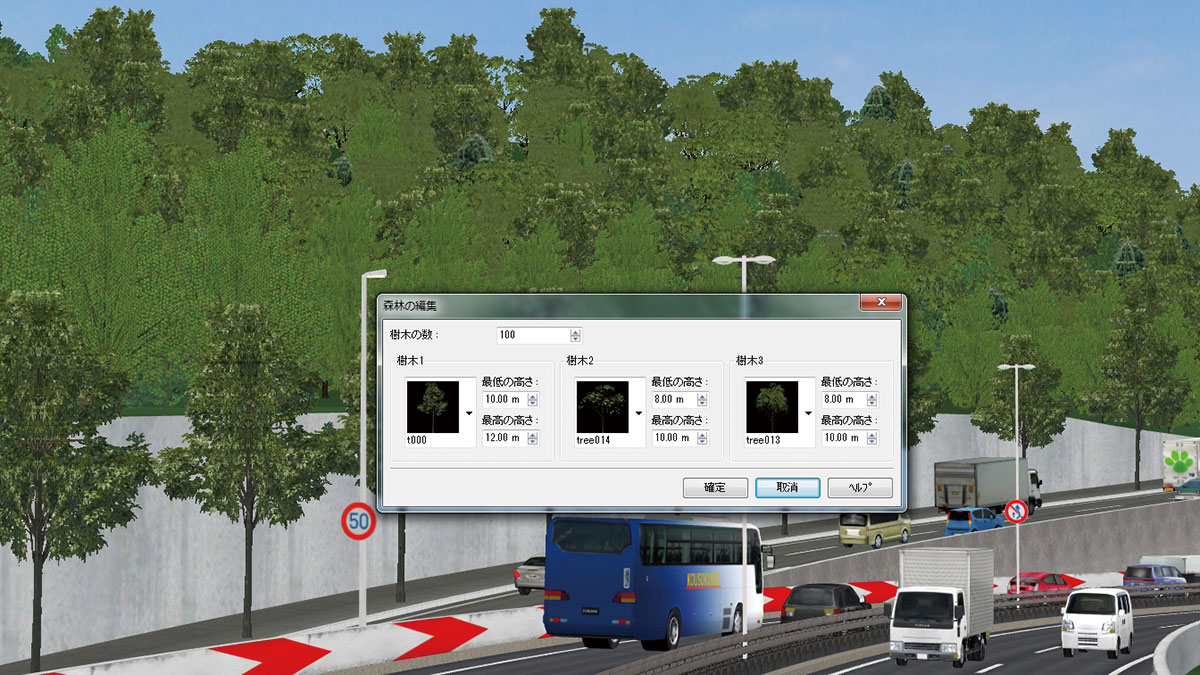
●生成森林
設置樹木模型並可在指定地形範圍內自動批量生成數百~數千顆樹木,也可一次性刪除。

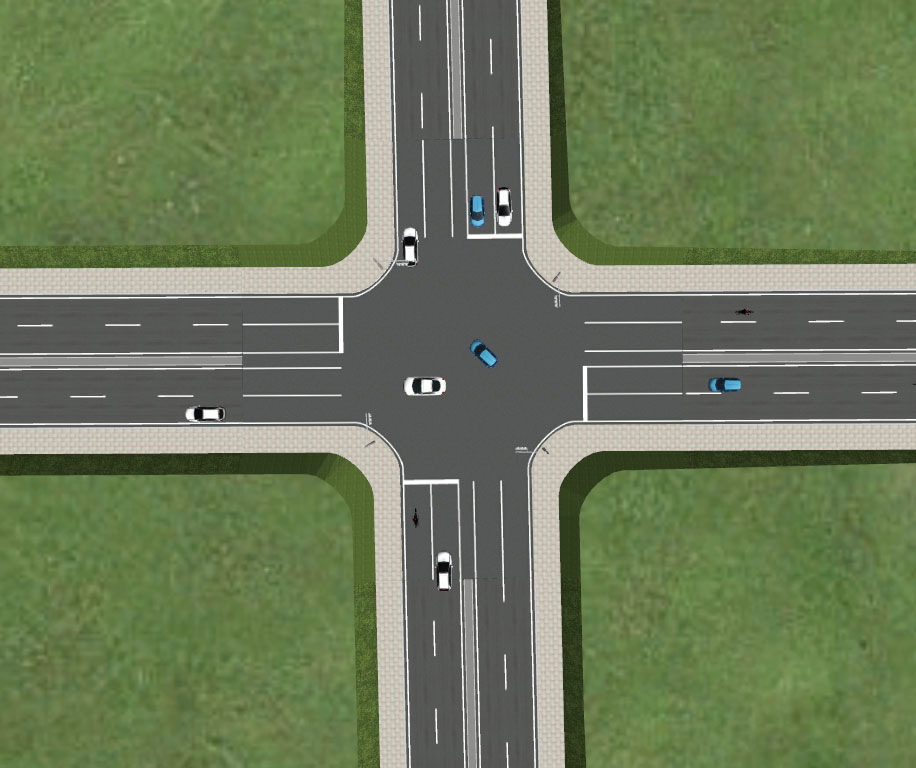
●交叉口,對應環島,L字
環島型,L字型等交叉口生成功能的擴展。對應複雜的平面交叉,道路標識的3DS格式輸出和編輯。交叉口內對行駛新增改良,可在替換後的交叉點模型上行駛。


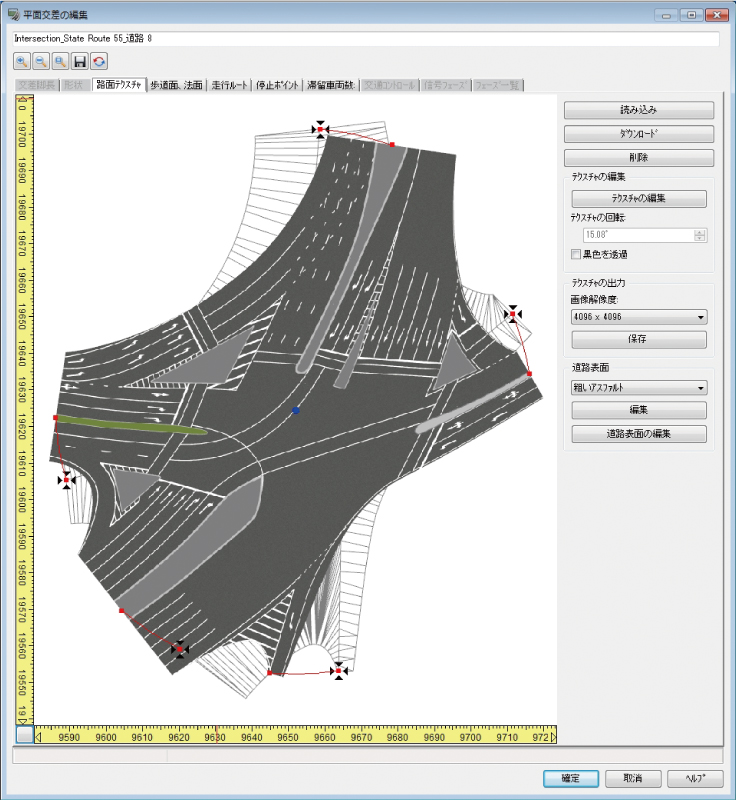
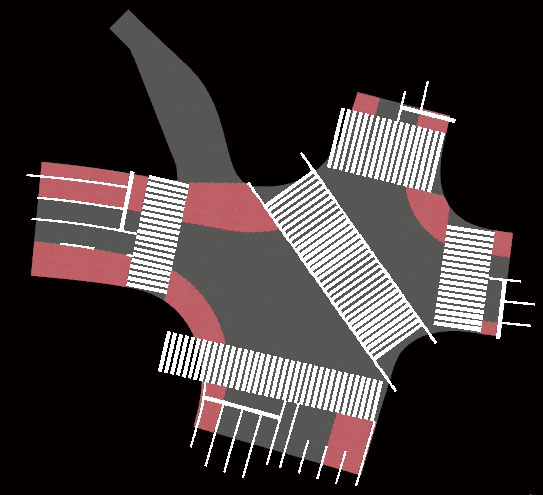
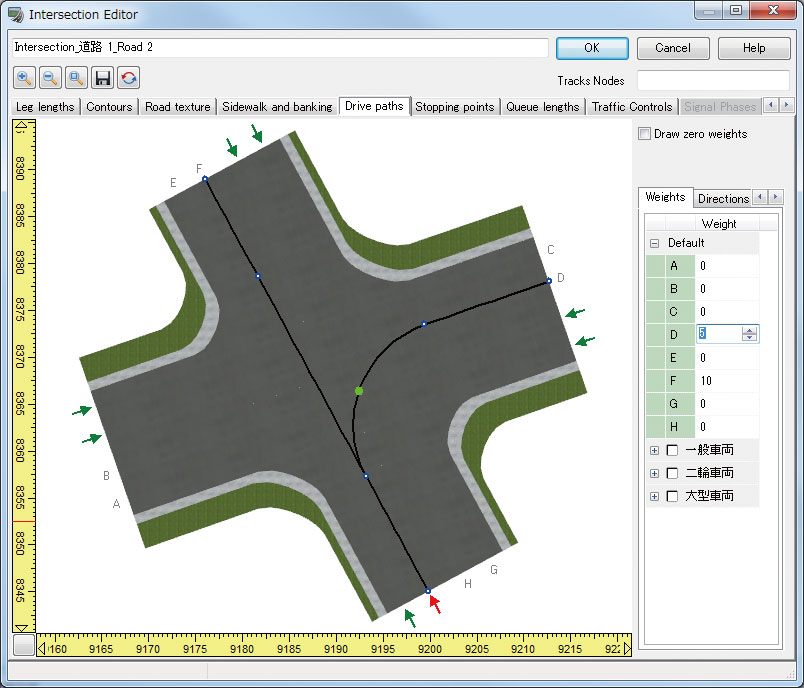
●交叉口編輯工具
半自動製作交叉口路面材質的功能。大大減輕了交叉口材質製作業務的時間。

●大樓編輯工具
可製作任意形狀的3D建築物模型。對應四角形、圓形、任意形的組合,對應前後、左右、高度的大小、晝夜的壁面材質。
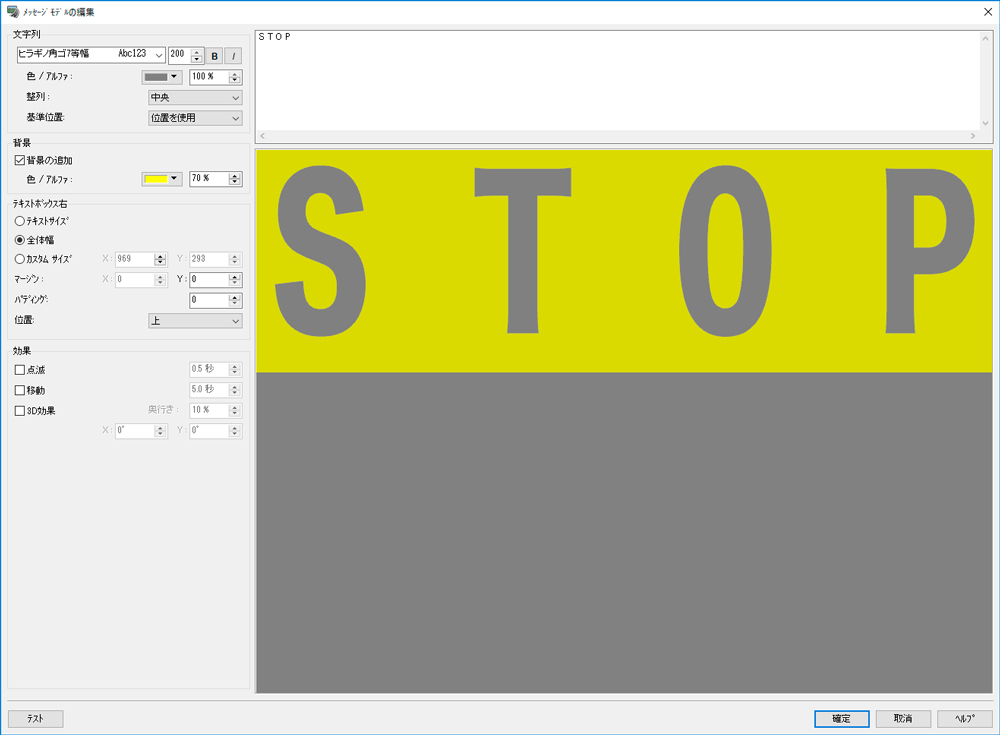
●3D文本模型
3D空間內對應3D文本的生成和配置。

●電視牆和播放機
對應VR空間內曲面表現的影像顯示。

▲在曲面中放映動畫
●火與煙的表現
不局限於火焰、篝火、溫泉、煙囪等,透過設置可呈現各種現象。提高真實感、對應通路(隧道)上煙霧的設置。


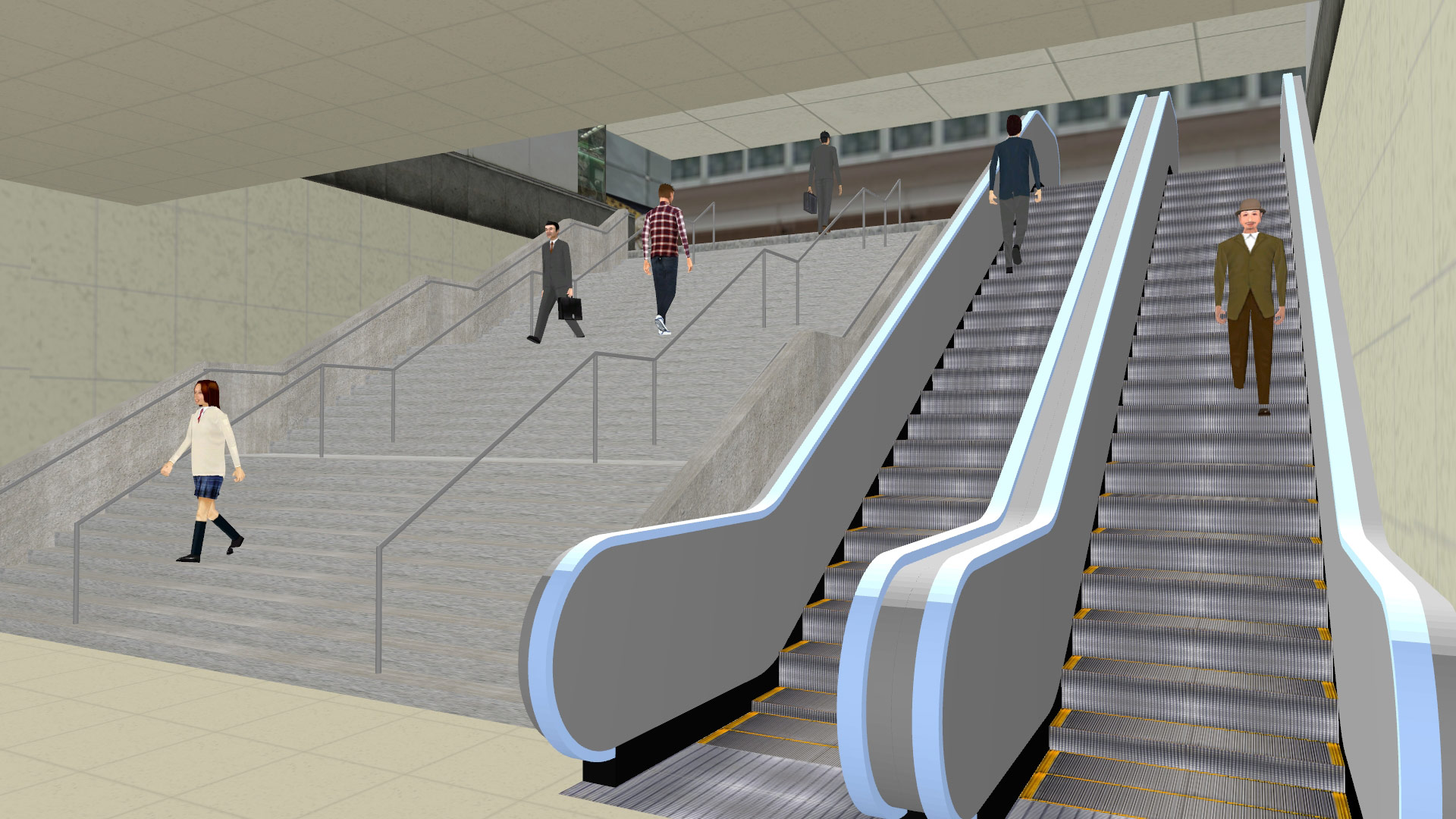
●參數3D建模
透過輸入參數製作標識、台階、扶梯、柵欄(Fence)。對於台階可自訂設置縱深、高度、台階數、材質等。
模型一覽
一般模型/汽車/計程車/3D座艙/道路結構物/旗/地形材質/電視牆/建築物/鐵路/拖車/交通訊號/人物/樹木/火焰・煙/3D文字列

▲地形指令整地處理
●FBX3D模型
擴充了UC-win/Road對應檔案格式。支援高精度,多種類模型的FBX格式檔案。支援應用了Bone要素的動畫功能及SketchUp等Collada檔案的讀取。



●LOD (Level Of Detail)功能
MD3字NTD、3D模型、FBX場景模型的表示中、採用LOD功能

●DWG/DXF導入/匯出
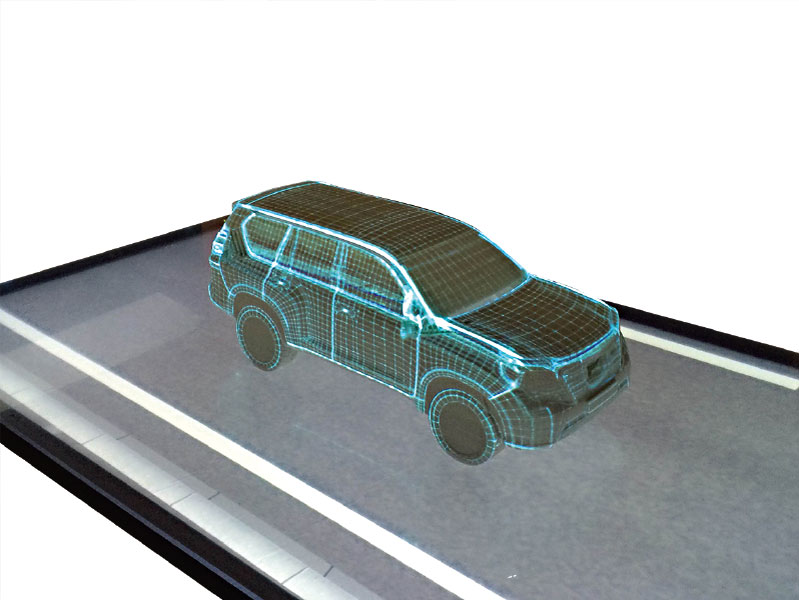
支援CIM的劃時代的功能

●透過連接3DVR和CAD加強促進CIM相關解決方案
支援將3DCAD Studio®3D CAD格式直接導入UC-win/Road虛擬環境,還支援IFC格式。


















-
交通模擬功能
-
- 行駛車輛分組化
- 分組設定路徑概率
- 交叉口內設置動作控制點、滯留車輛數
- 交通流的速度控制、消滅產生
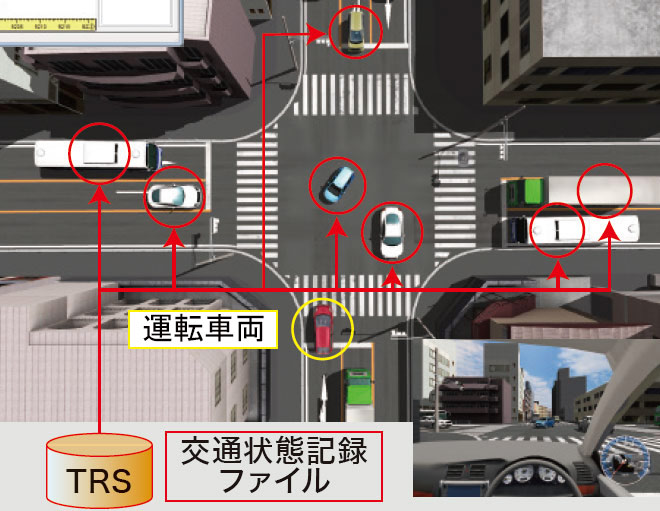
- 場景功能(各種事件的發生)
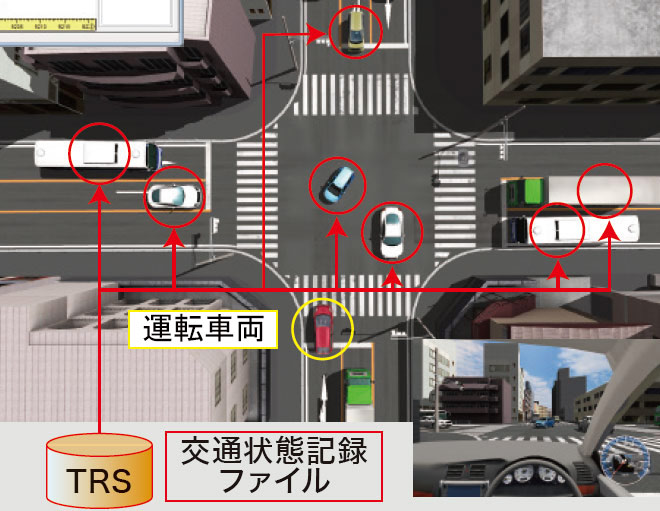
- 交通狀態儲存(交通拍攝功能的場景、腳本、景況控制)
- 場景擴展
可指定動態的行駛速度、車道、限速允許範圍等。對前方車輛新增各種指令(交通流、微觀模擬播放的車輛) - 出發地點與目的地平均行人數量設置
- 路徑的種類新增(車站、階梯/扶梯)
- 支援Rink (電梯、接待室)接續
- 對應多數行人屬性
- 對應最短路徑檢索
●交通模擬功能

●號誌控制•道路障礙交通模擬
支援基於車輛性能的交通情境模擬。對應各種交通規則、號誌控制、車道控制、並可實現車道燈、號誌表現的交通情境。

●交通規則設置
搭載有中國、日本、紐西蘭、韓國的交通規則,並可自由新增其他國家的新規則。
●越野功能
實裝了在人行道,邊坡,道路以外的地形上可以自由行駛的越野功能。

●交通連接器
道路平面線形的編輯介面或是在主功能表定義連接移動節點的虛擬管線設置交通移動。
●行駛車輛設置•動作控制點
行駛道路、開始位置、其他行駛車輛後面跟隨形式(列車等)、聲音設置、透過動作控制點的設定控制匝道等。
●交通車輛車輪旋轉、舵角顯示功能
透過Vehicle Editor外掛程式可在3D模型上指定前輪和後輪,即可顯示舵角。

●VISSIM對應
導入VISSIM的交通流分析結果,對應交通分析的視覺化。

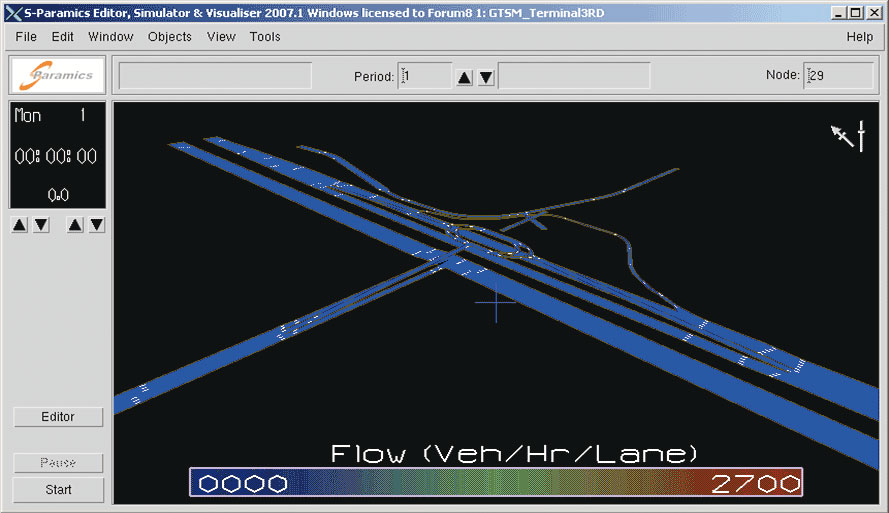
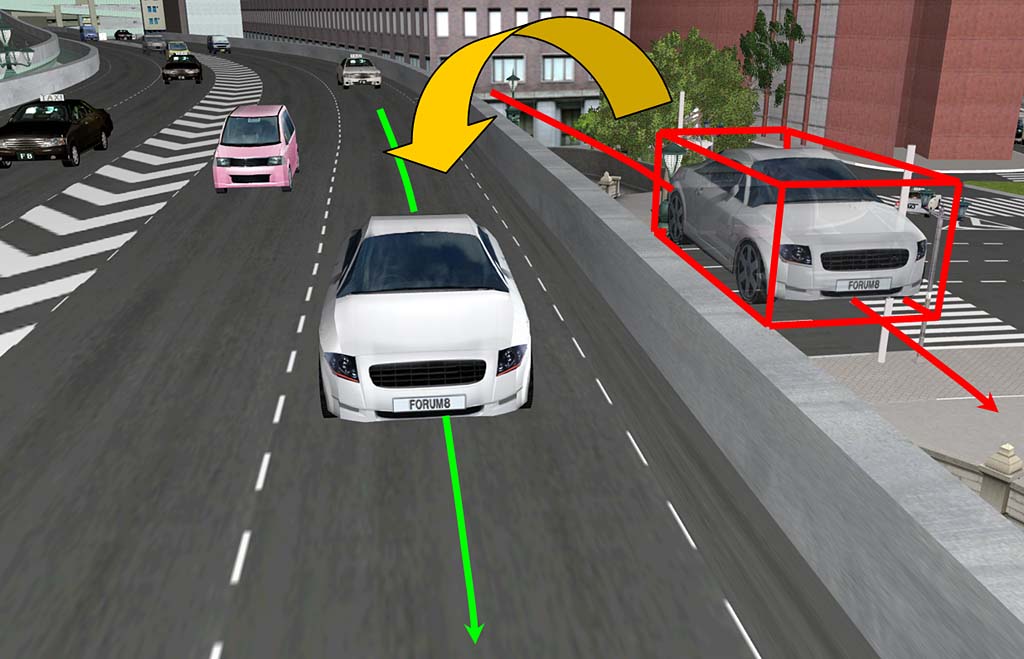
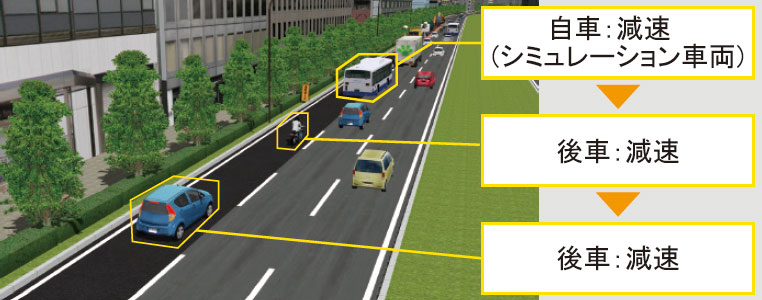
●互動功能
VISSIM、S-PARAMICS等各種交通分析軟體生成的交通流和自身車輛行駛軌跡的干擾確認 (200m以內)。面向自身車輛行駛的干擾車輛自行減速。
●導航功能
明確區分了移動模式與單純的視點操作,對應了移動模式中的視點操作。
移動模式 可能的視點操作 自由移動 旋轉、前後移動、左右上下移動、自由飛行、衛星移動、跳躍 行駛、飛行、運動移動 旋轉、對象物為中心旋轉、衛星移動 步行 旋轉、跳躍 追蹤 對象物為中心旋轉、衛星移動

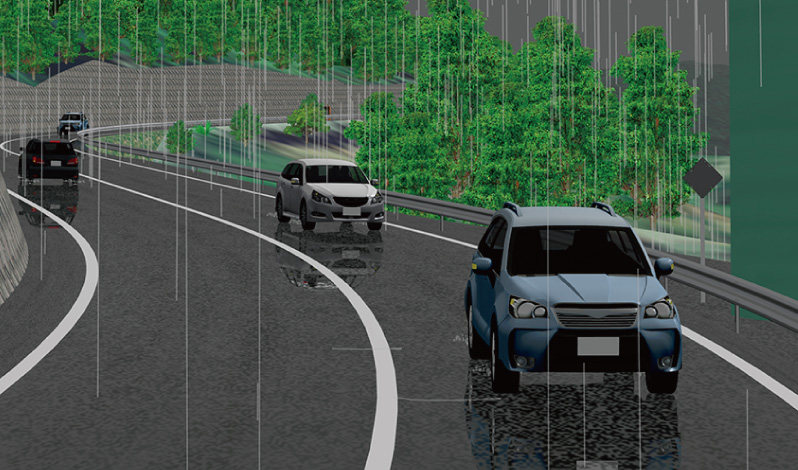
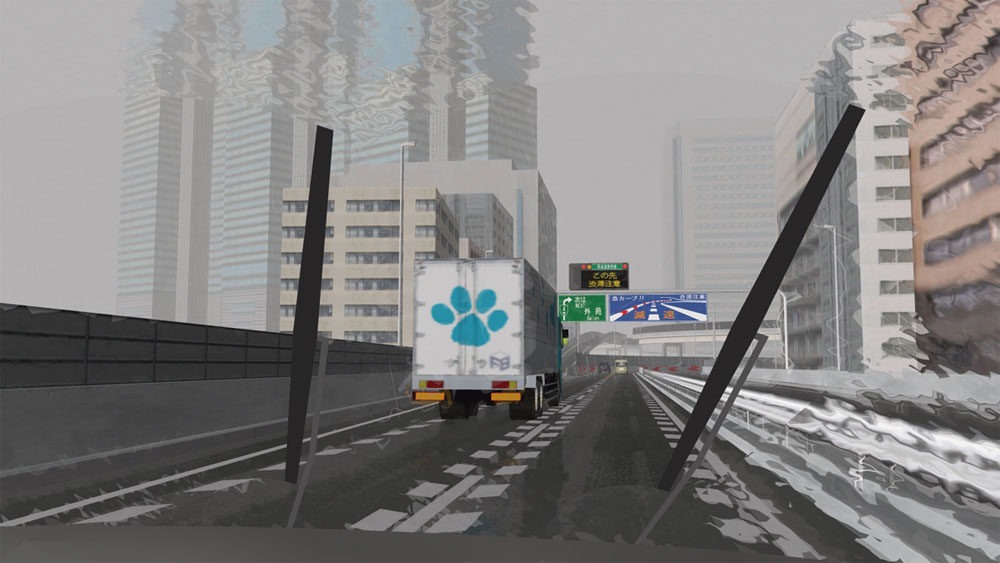
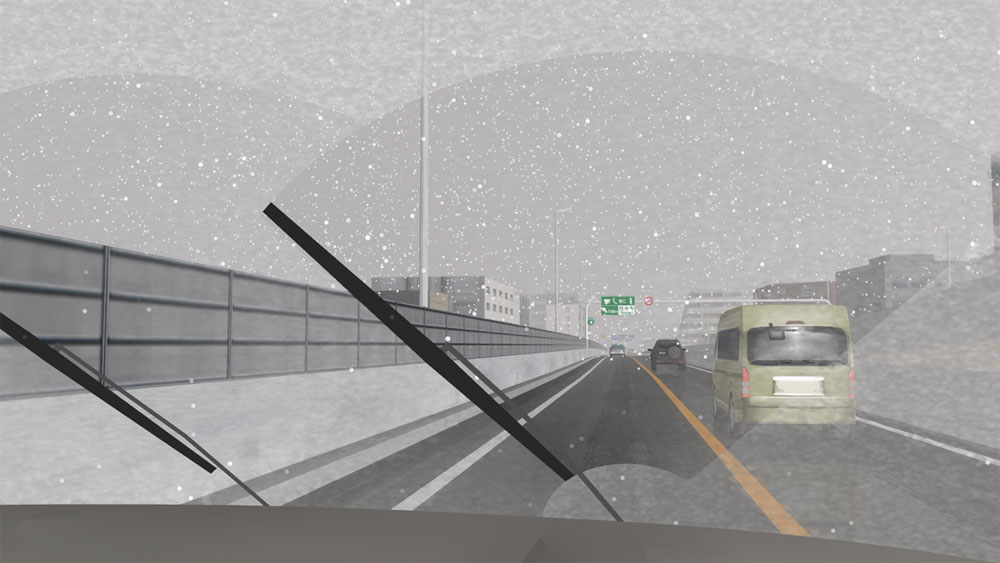
●氣象特殊效果和光照
強化了雨雪的表現,新增了霧的範圍指定功能、雷電效果和雨刷等功能。

▲路面反射

▲積水

▲雨紋

▲水簾

▲濺水

▲雷

▲雨刷(雨)
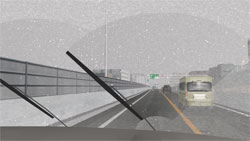
▲雨刷(雪)

▲雨刷(大巴・大貨車)
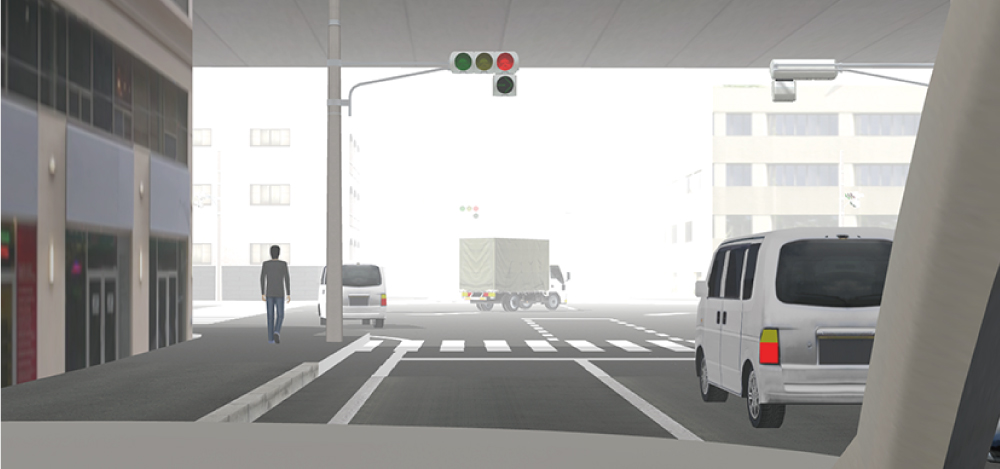
●步行模擬
步行中可變更速度。新增了滑鼠對步行的控制操作。
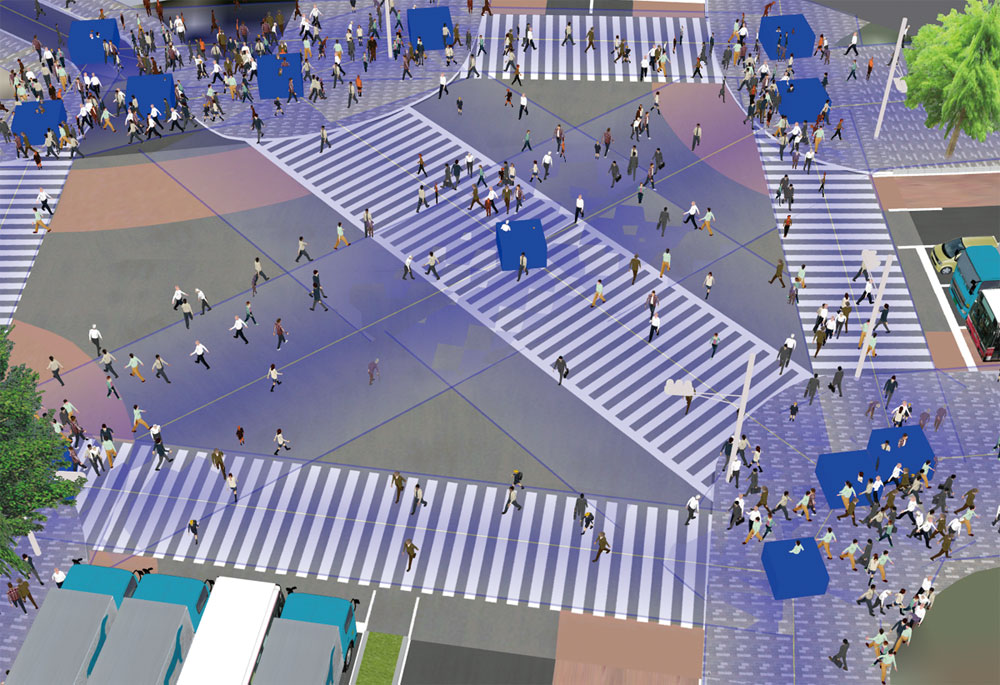
●行人的群體移動
3D空間上配置具有寬度的飛行路徑(Path Way),設置多數行人的功能。
▲閃躲行人的行動
▲行人道設定
●人造燈光/陰影
自動切換晝夜材質模彷出燈光效果。車輛模型進入隧道時可切換為該模型夜間的材質。
●照明功能
透過聚光照明、車頭燈功能進行夜間模擬、照明模擬。實裝了Bloom功能,可以映照物體。也可使用於號誌燈光、車燈、夜間建築物窗等。


●車頭燈
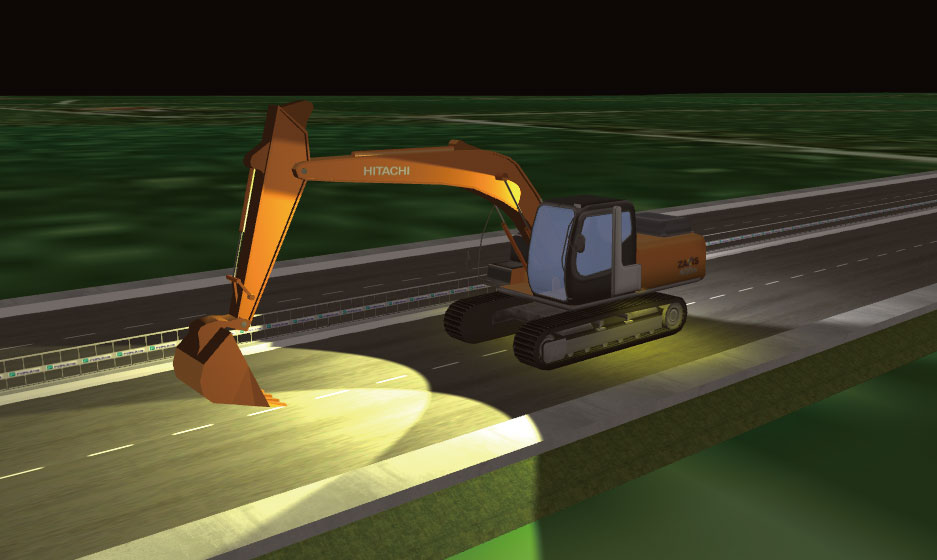
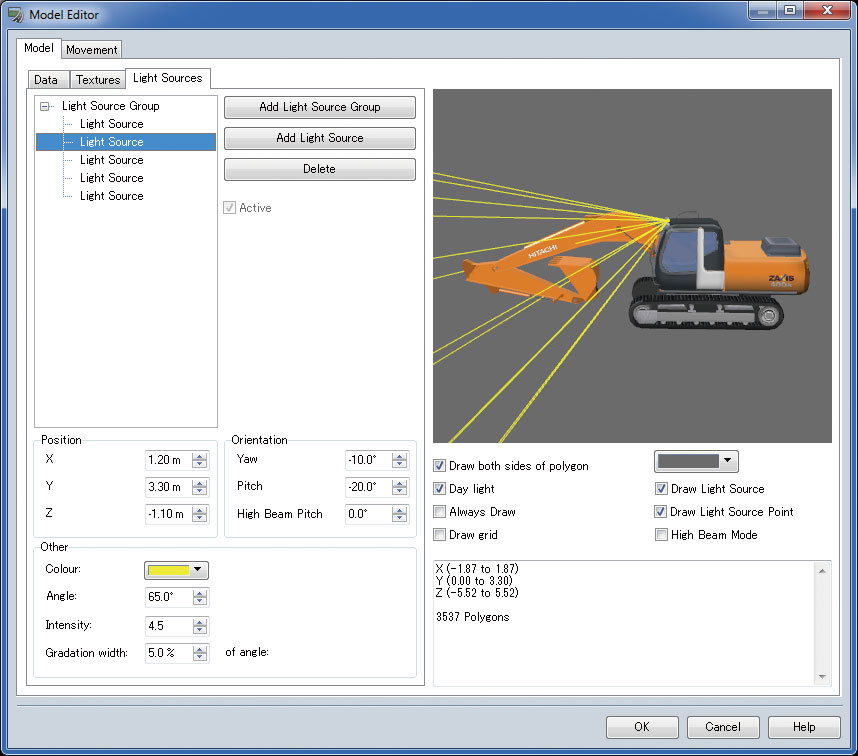
能為每輛車設定頭燈。也可對應煞車燈、方向表示燈、警示燈、車尾燈、倒車燈、霧燈、小燈、擴張燈等10種表現,或是挖土機等特殊的燈。

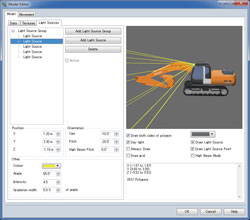
▲挖土機等特殊燈的表現
●隧道照明功能
隧道中可設置隧道空間內的照明顏色和強度。效果可應用在駛入隧道內的交通車輛、道路的附屬物。

●景況(環境儲存)
1個場景中可以儲存多項環境設置,點擊即可執行場景功能。


●3D立體顯示
對應利用作用視差輸出複數畫面的偏向方式;在1個畫面左右映射交互顯示的主動方式。也支援寬屏畫面的顯示。

▲左眼顯示

▲右眼顯示
●使用者變數功能:方案控制、日誌輸出等
●天幕功能
對應在球體內側對天空進行渲染的天幕功能。
●高精度渲染(陰影/湖面反射/自動生成天空)
湖面波紋反射,根據時間自動生成天空圖案。改進了陰影的渲染性能和品質。
●使用物件自訂ID的物件引用功能




















-
駕駛模擬/車輛研發
-
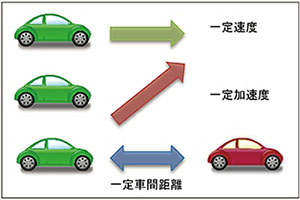
- 速度指定:忠實沿著指定的速度行駛。
- 加速度指定:忠實按照指定的加速/減速。可沿著道路行駛及任意方向行駛。
- 與其他車輛保持車間距離:與物件車輛一邊保持一定距離行駛。
- 對應ABS (防鎖死煞車系統)
- 儀錶板顯示
- AT車對應扭矩增幅作用及爬坡現象
- 利用AT車,急加速時、上坡等高負荷時高旋轉,低負荷時低旋轉
- 支援手動檔車的半連動操作
- 速度自動控制
- 方向盤自動控制
- 煞車輔助系統
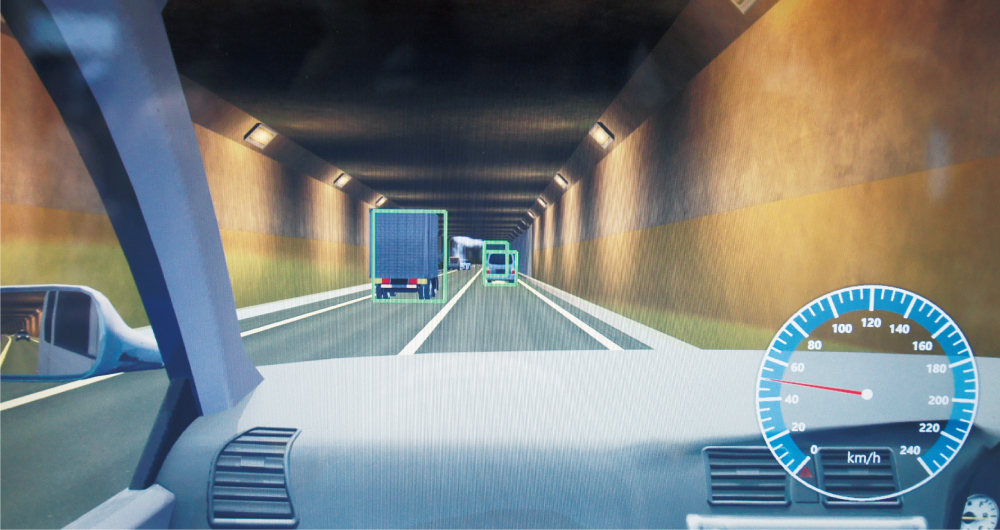
- 前方車輛資訊重疊顯示
●手動駕駛
基於不同車輛種類的汽車性能配置,對應交通流及手動駕駛。
※手動駕駛需要另售的轉向控制器(方向盤、加速器)。
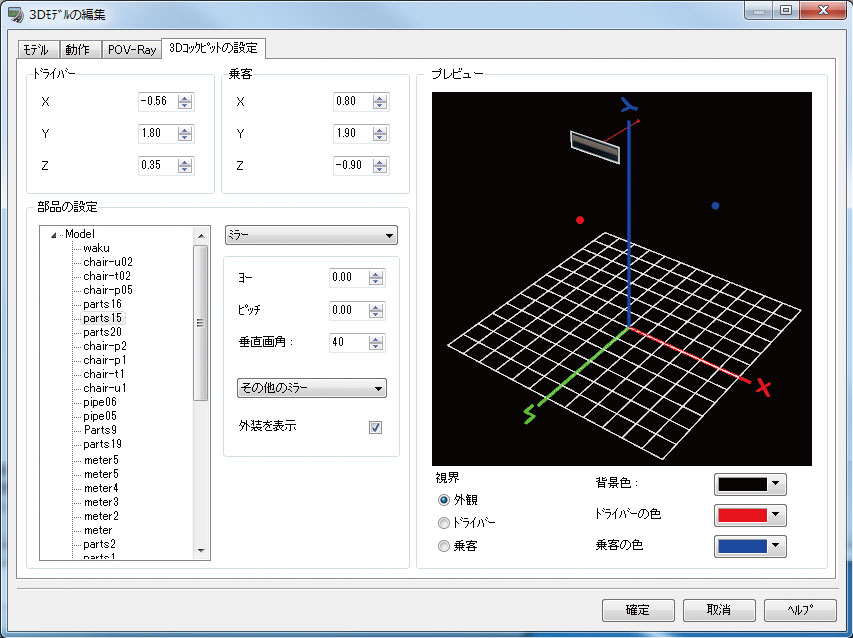
●測試鏡、後視鏡、車載導航顯示
3D座艙內對應側視鏡、後視鏡(即時顯示)、導航(任意視點表示)等的即時顯示。3D座艙模型的部件可自由指定。駕駛方向盤可隨駕駛操作轉動,視鏡可設置視點、角度及新增視鏡。
●UC-win/Road駕駛模擬器產品資訊
▲後視鏡的設置

▲支援設置複數的後視鏡

●汽車控制
針對機動車拓展表現可能的燈的種類,現在的煞車燈,方向表示和危險提示燈、尾燈、後燈、霧燈、小燈及拓展燈泡等10個的表現及控制。當中追求再現性的場景當中與預先記錄動作的播放使用微型模擬播放機對應後,另新增了以下車輛控制模式。
▲與其他車輛保持距離
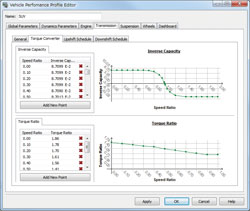
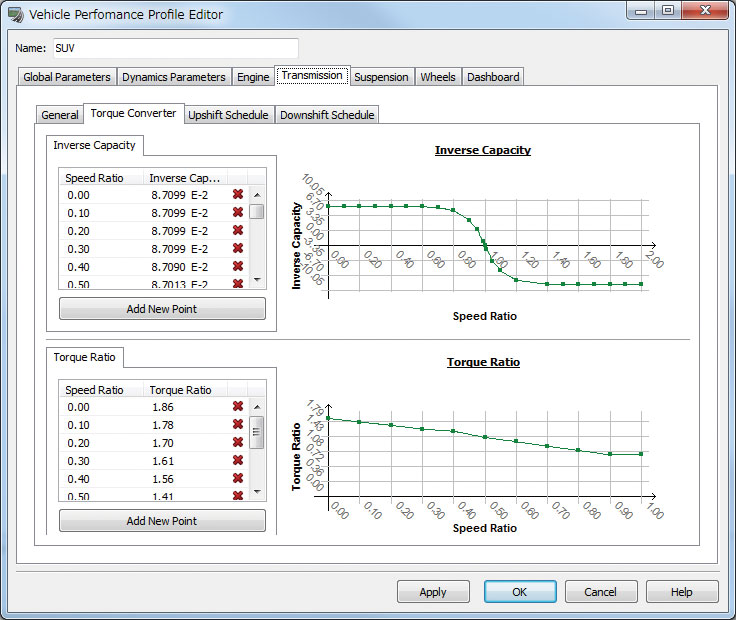
●車輛運動模型的構成
實現駕駛中的車輛整體的動作、引擎、從引擎到車輪的各項傳遞裝置的模型,可以更加真實地表現車輛。
●駕駛模擬
搭載可進行高精度車輛物理計算的車輛運動模型,可以兼顧考慮發動機、加速器、車重、中心位置和輪胎摩擦係數等。

●ACC•自動駕駛功能
支援自身車的ACC、自動駕駛功能。可在手動駕駛/自動駕駛之間切換。也可識別號誌和限制速度。

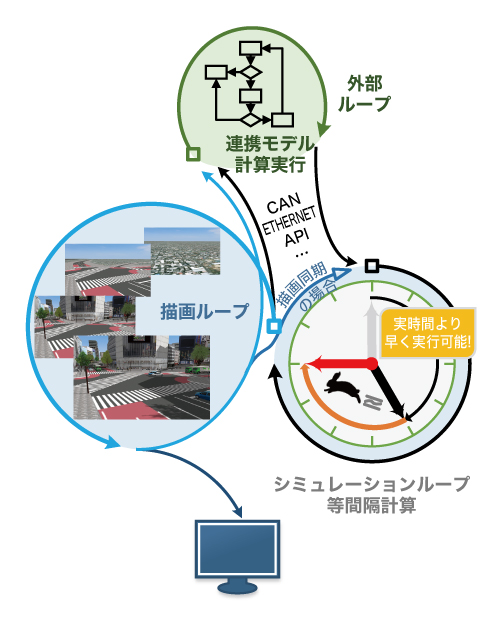
●計算周波數的控制以及SILS功能
機動車的研究開發當中,決定機動車以及各個車載機器的模擬週期比較普遍。到目前為止UC-win/Road單體當中根據電腦的演算裡不同將視覺化與模擬計算同步並使用同樣週期執行。
根據VR資料的內容不同週期也可改變。另一方面,使用內容也可柔軟得執行模擬,但是進行正確的週期計算比較困難。
UC-win/Road Ver.12當中可將計算週期與影像更新週期獨立設置,模擬需求(計算與顯示、只計算)需要使用各種各樣的模式。以下總結了各個組合以及使用目的。
並且使用SDK可對內部計時器進行客製化開發。
計算時間步驟 表示同期 內部計時器 系統運行說明 應用 ON - 按照實際時間,將計算與顯示同步,根據計算與表示負擔不同占率可變(現模式) 應用 OFF - 按照實際時間,根據CPU的性能FPS的值將會提高。顯示將根據電腦性能不同,模擬計算以下的FPS。 固定 ON ON 固定模擬的計算率,顯示所有的幀率。在可能的前提下按照實際時間進行(負擔大時比實際時間慢)。 固定 OFF ON 固定模擬的計算率,根據表示性能不同可能將只顯示幀率。爭取按照實際時間執行(負擔大時有時會比實際時間慢)。 固定 ON OFF 固定模擬的計算率,顯示所有幀率。根據電腦性能、FPS將增強。(不考慮實際時間) 固定 OFF OFF 固定模擬的計算率,顯示所有幀率。根據電腦性能,FPS將增強。(不考慮實際時間)將根據電腦性能不同,顯示模擬計算以下的FPS
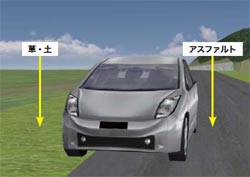
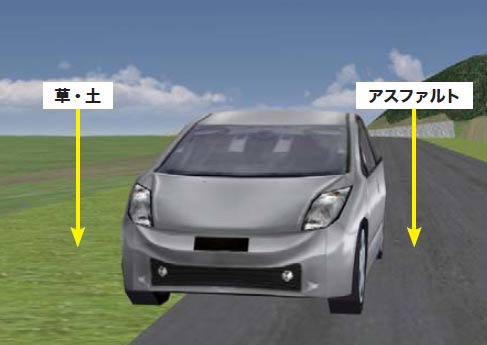
●路面屬性
可區別材質設置路面摩擦係數的數值。

▲材質摩擦係數大的路面

▲易滑的路面(雪道)

●音響系統
使用了OpenAL、對應多樣的環境聲、其他車聲、自車車聲(引擎音、輪胎音、颳風音、隧道反射音)。
對應低通濾波器。對應車輛噪音(打滑音)、各輪胎噪音的表現。
●力回饋
路面材質、路面形狀引起的振動以及一定範圍內的振動傳送至方向盤。

▲震動區域

●CAVE系統
根據螢幕和使用者之間的位置關係來計算和繪製視覺體積。使用設備跟蹤使用者的位置變化,並更新視點和視覺體積。

●視線追蹤
駕駛行駛時,透過Kinect等感測器接收駕駛員的視點位置傳動至UC-win/Road中。


▲後視鏡的顯示變化
●邊緣平滑對應
多個投影機投影時,投影的連接部分可平滑顯示。也可對應投影機的投影角度。

●CarSim的連接功能
運用摩擦係數μ的設定值,可實現即時車輛運動模擬。

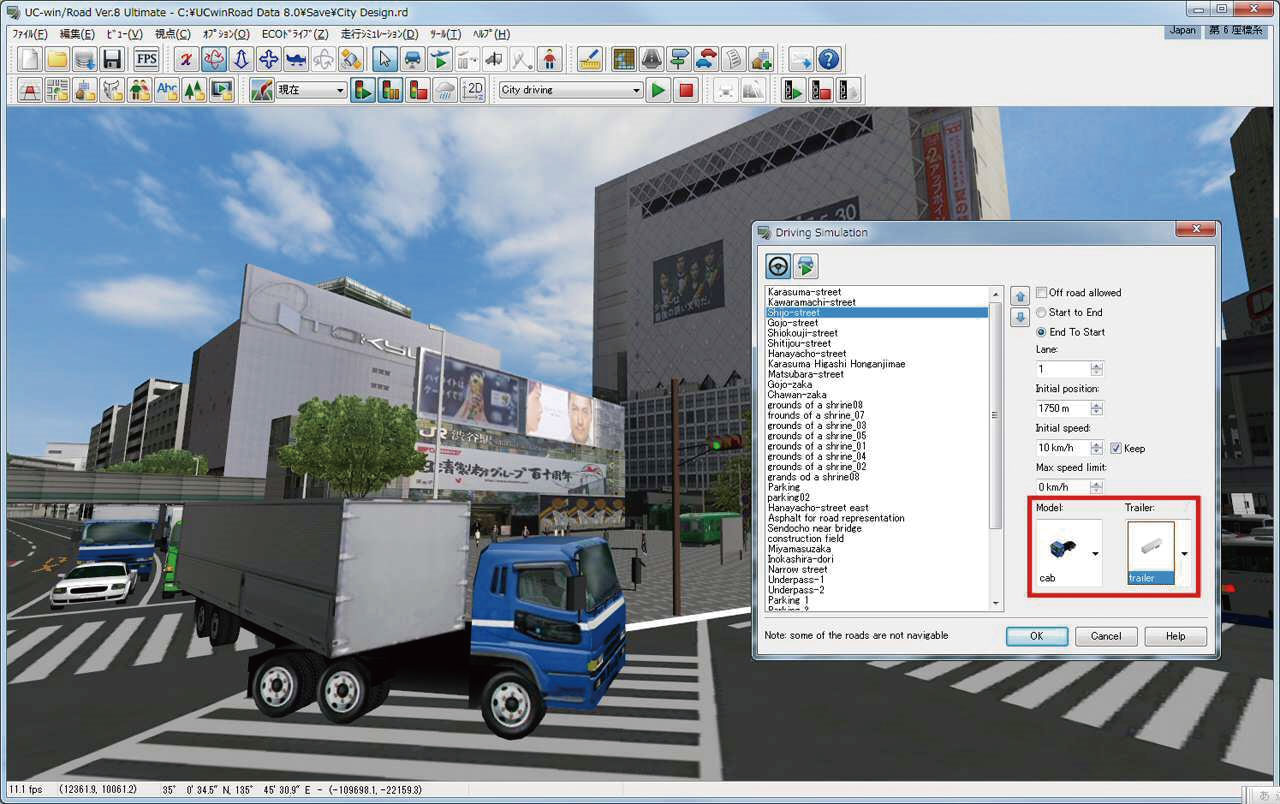
●拖車的駕駛行駛功能
在駕駛開始時的選擇畫面,可選擇廂式模式/拖車模式










-
使用者介面
-
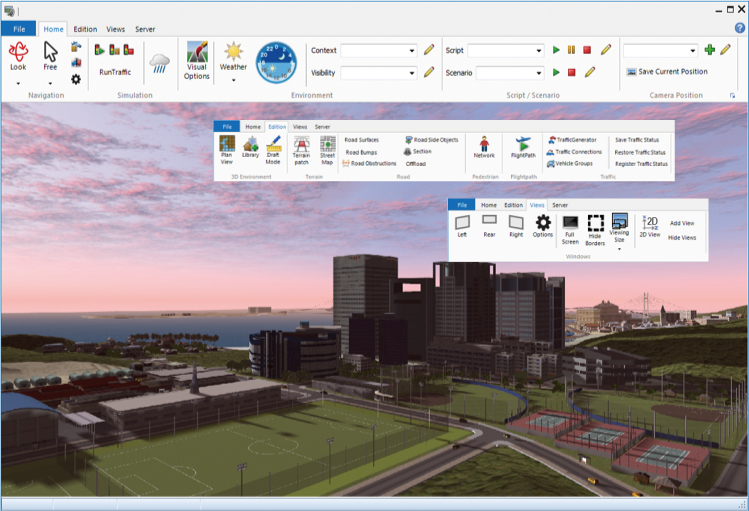
●全螢幕顯示、模擬面板對應
可隱藏所有功能表以及工具列全螢幕顯示。新增了控制台可進行面板配置、自訂指令。

●2D視圖平面顯示
顯示3D模型、道路和汽車等的資訊和框架。一目了然地瞭解模擬情況。

●3D導航(3D滑鼠)
透過使用[Space Navigation]等3D滑鼠,可在3D空間內移動操作、同時也支援滑鼠操作。

●遊戲控制器,支援透過鍵盤進行駕駛操作
●UniversalUI外掛程式
圖片、動畫、Web頁面等各種內容透過點擊3D圖示在直觀的介面中瀏覽或搜索。

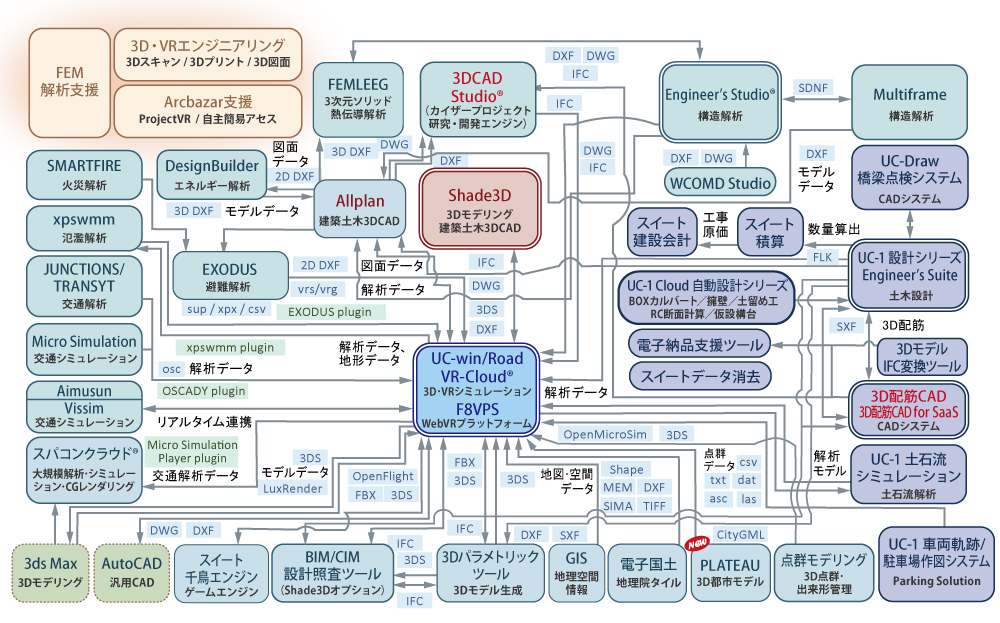
3D・VR Solution

-
IFC資料的連接
-
▲UC-win/Road→IFC
▲運用IFC的案例BuildLiveTokyo
-
道路CAD的資料連接
-
透過計CAD應用軟體與UC-win/Road間的連接提供道路、製造等土木設計、VR模擬、演示的綜合系統。

●UC-win/Road 資料轉換工具 for APS-Win
具有道路線形、鐵道線形(正弦曲線、三次抛物線)的規劃討論中必要的功能,在各項設計中可進行檢查與座標計算。同時,結果還可作為線形圖輸出。
可提高地圖作成、用地配置、道路/鐵道/宅地製作、環境影響調查等的效率。透過將UC-win/Road資料導入12d Model,可以進行土量體積計算和詳細圖表編輯。

▲UC-win/Road

▲12d Model
●UC-win/Road OHPASS 外掛程式選項
透過道路最佳找尋系統OHPASS的計算結果和UC-win/Road的連接,計算得到的結果可以進行即時的觀察。





-
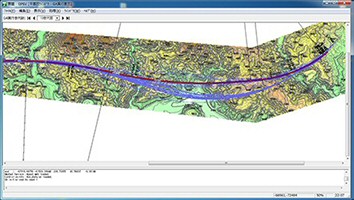
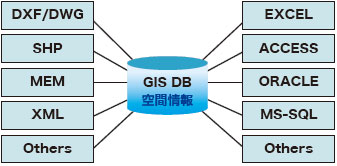
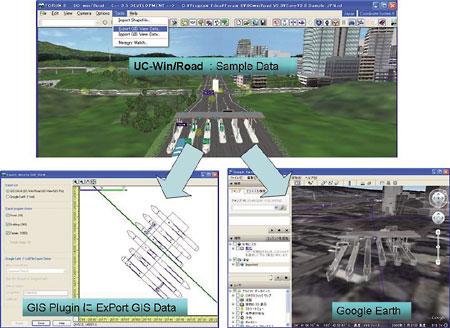
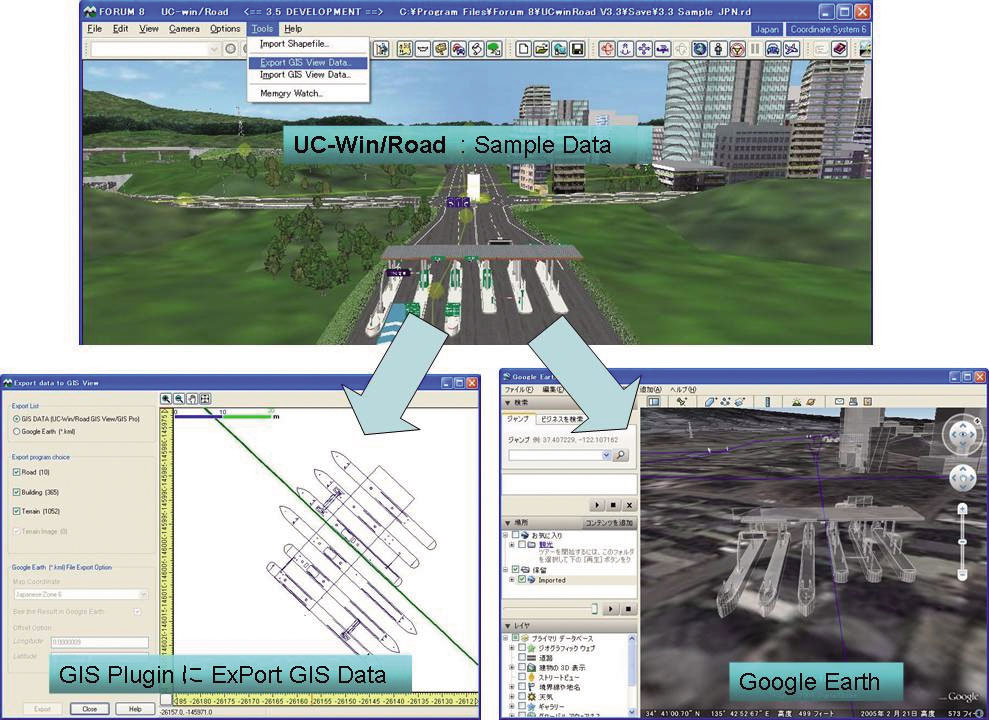
GIS資料的連接
-
以UC-win/Road為基礎的GIS應用程式
衛星圖片、地形、道路(Line) 、建築物(Polygon)、飛行路徑 (Line、Spline)
-
UC-1設計系列的資料連接
-
3D配筋模擬
●>3D配筋模擬
連接UC-1設計CAD系列製作的配筋圖對應3D配筋模擬。
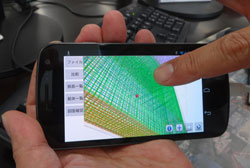
●3D配筋CAD for SaaS
引領CIM時代的施工現場工具,支援在Android™設備上同時顯示3D和2D工程圖。
●3DCADStudio®
可以執行3D建模和與各種產品的資料連接,可以導入和匯出DWG檔案。

-
交通AP的資料連接
-
與交通訊號設計[OSCADY PRO]、土地利用、交通建模系統[TRACKS]連接並實現VR模擬
■ 英國交通研究所 TRL社(http://www.trl.co.uk/)
與UC-win/Road連接、OSCADY PRO的解析結果可在3D虛擬實境空間中進行確認。
■ 英國交通研究所 TRL公司(http://www.trl.co.uk/)
UC-win/Road中可提供指定格式,連接與車輛位置資訊。
●Aimsun
■ 西班牙 TSS公司(http://www.aimsun.com/)
透過動態分配功能,再現公共交通、行人和自行車。

●VISSIM
■ PTV公司(http://www.ptvag.com/)
微觀模擬系統VISSIM與UC-win/Road的即時資料連接。

▲VISSIM的道路數據

▲UC-win/Road的視覺化結果




-
分析數據的連接
-
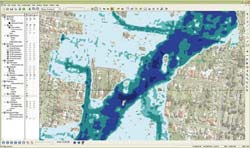
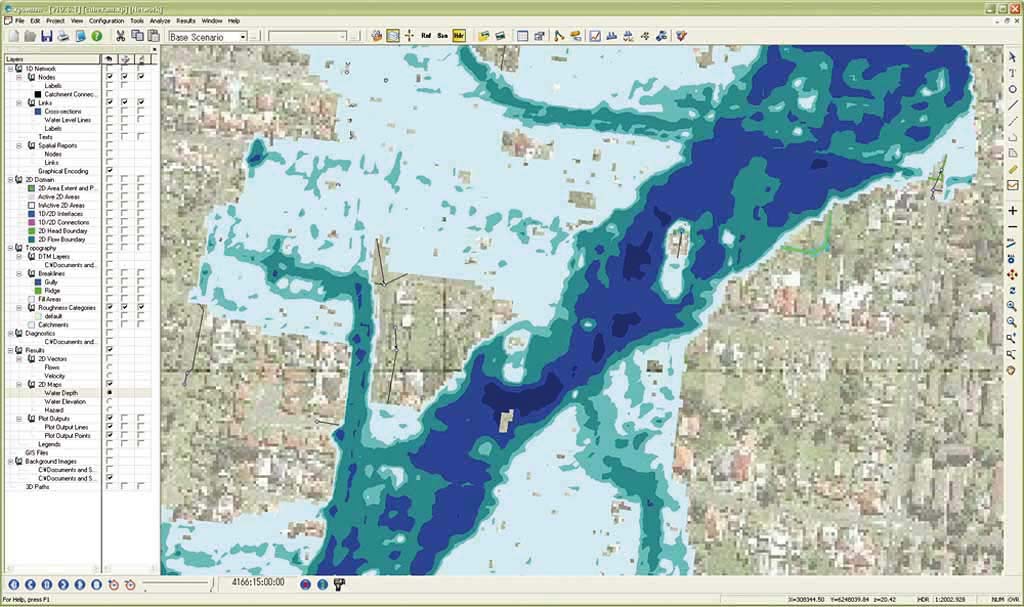
- 地形模型的視覺化(導入Shape file)
- 氾濫水面的上升下降的時刻履歷變化
- 氾濫水面的流速適量的時刻履歷變化
- 地下管道和管內水位的時刻履歷變化
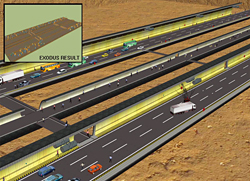
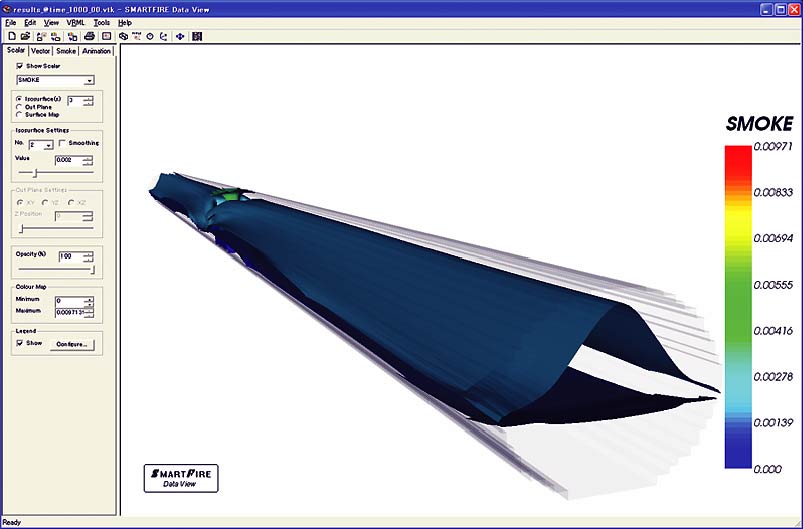
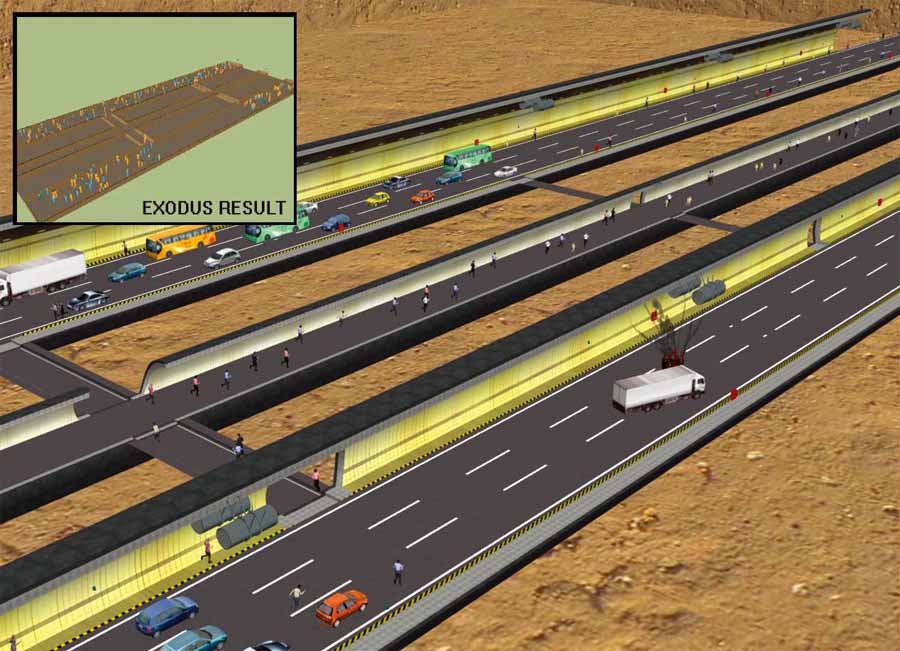
連接避難解析EXODUS和氾濫解析xpswmm的分析數據,在虛擬環境中視覺化。
透過連接UC-win/Road與EXODUS(避難解析)/SMARTFIRE(火災解析)可在3D虛擬實境(VR)空間內對EXODUS的模擬結果進行確認。


海嘯分析、氾濫分析軟體[xpswmm]分析結果的3D視覺化。
▲xpswmm

▲UC-win/Road for xpswmm


軟體利用環境
-
3D數據對應格式
-
3DStudio Object *.3ds
UC-win/Road可與3DS、FBX、MD3、COLLADA、OBJ等形式的3D數據對應,可使用以下軟體製作數據。
-
操作環境
-
- 駕駛模擬需要準備方向盤、煞車和油門的腳踏板(另售)。UC-win/Road的駕駛模擬相關請參閱以下連結。
https://www.forum8.co.jp/traditional/uc-win/road-drive-cht.htm - 從RoadDB下載樣本資料、樣本模型等需要連接網際網路。
- 通常顯示卡具有多個輸出端,如果需要使用多個螢幕請務必檢查這些輸出端是否可用。如果無法滿足多螢幕輸出,請在電腦中新增顯示卡。
- 在訂購或購買試用版之前,請確保您的系統滿足最低配備要求。請在建議設備的環境中運行該軟體。
- 將螢幕格式、字體和大小設置為預設值,建議使用20英寸或更大的顯示器。
數據製作 建議操作環境 OS Windows 8.1 /10 /11(建議64bitOS) CPU Intel® Core i7 4核心以上,3.2GHz以上 記憶體 8GB 以上的RAM 硬碟 SSD硬碟
最低60GB的容量(安裝包含地形資料、樣本資料的套裝軟體至少需要30GB以上的可用容量),以及儲存從RoadDB下載的模型資料和播放AVI動畫所需的空間容量。顯示卡 NVIDIA GeForce 950 系列 GTX以上 8GB以上的記憶體 顯示器 1920x1080以上
關於畫面設計、字體大小,只支援Windows預設的Aero主題生效的預設設置。選購配備 DVD光碟機 音效卡 任意
駕駛模擬 建議操作環境 OS Windows 8.1 /10 /11(建議64bitOS) CPU Intel® Core i7 4核心以上,3.5GHz以上 記憶體 8GB 以上的RAM 硬碟 SSD硬碟
最低60GB的容量(安裝包含地形資料、樣本資料的套裝軟體至少需要30GB以上的可用容量),以及儲存從RoadDB下載的模型資料和播放AVI動畫所需的空間容量。顯示卡 NVIDIA GeForce 1070 系列 GTX以上 8GB以上的記憶體 顯示器 1920x1080以上
關於畫面設計、字體大小,只支援Windows預設的Aero主題生效的預設設置。選購配備 DVD光碟機 音效卡 任意
注意事項
- 駕駛模擬需要準備方向盤、煞車和油門的腳踏板(另售)。UC-win/Road的駕駛模擬相關請參閱以下連結。
-
UC-win/Road 駕駛模擬器
-
- 透過UC-win/Road製作自訂的3D駕駛環境
- 透過套裝軟體提供標準外掛程式
- 附帶免費的VR場景資料,且支援場景的自訂編輯
- 透過描繪選項再現豐富多彩的環境
- 透過車輛的OEM批量生產實現低價格
- 透過用戶自訂滿足高度的模擬需求
可自訂多樣化的駕駛環境並進行反復的駕駛體驗。
近年來駕駛模擬器被廣泛應用於車輛系統開發、ITS交通系統研究、駕駛員、車輛、道路和交通間的交互研究等諸多領域。

-
UC-win/Road 體驗模擬器
-
該模擬器搭配力回饋運動平台,可以獲得真實車輛的駕駛體驗。可用於汽車安全技術的模擬體驗(碰撞回避、碰撞減少等)、交通事故的模擬體驗、最新的ITS技術體驗等。


-
UC-win/Road 高速公路駕駛模擬器
-
這是運用Subaru汽車部門的技術開發的6軸運動平台(已獲得專利),由Subaru技術公司開發的駕駛模擬器。該模擬器搭配力回饋運動平台,可以實現真實車輛的駕駛體驗。可用於汽車安全技術的模擬體驗(碰撞回避、碰撞減少等)、交通事故的模擬體驗、最新的ITS技術體驗等。

-
UC-win/Road 安全駕駛模擬器
-
■型號認證標準 標準場景
1. 危險預測教材 2. 夜間駕駛培訓教材 3. 急煞車培訓教材
4. 高速公路培訓教材 5. 地區特性培訓教材 6. 惡劣環境下的駕駛培訓教材
■駕駛體驗項目設置
7. 交規違反培訓教材 8. 夜間視野確認教材
■系統組成
・中央控制裝置用電腦 ・駕駛模擬器用電腦數台 ・印表機
※透過網路連接。
■評估/統計軟體
・評估軟體 ・統計軟體

-
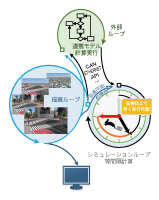
資訊利用型人-汽車-交通流交互模擬系統
-
6自由度0.7G對應運動平台的高級研究用駕駛模擬器
FORUM8於2012年3月22日向九州大學大學院統合新領域學府交付了高級研究用駕駛模擬器[資訊利用型人-汽車-交通流交互模擬系統]。以用於促進下一代汽車資訊和控制系統的教育研究活動。

向九州大學交付了高級研究用駕駛模擬器
本模擬器是透過UC-wm/Road進行集成,將駕駛模擬器、交通流模擬器、車輛運動模擬器、HILS/ECU模擬器、視線計測裝置等相連接的駕駛模擬系統。2012年5月13日在伊都校區召開的紀念九州大學10周年[九大百年校慶]中,作為研究公開及參觀物件之一進行了一般公開、試乘體驗等。試乘會以親友相邀為主排起了長隊,模擬器的體驗區非常有人氣,共計106名人士體驗了駕駛模擬器。 試乘賽道是從本公司福岡營業所附近(大博通)開始,到博多站為終點的約2分鐘內容,[豐富逼真地表現,圖像也非常流暢美觀]等,獲得許多好評。此外,FORUM8還於2012年3月向京都大學大學院工學院工學研究科交付了高級研究用駕駛模擬器(六自由度5通道)。




▲資訊利用型人-汽車-交通流交互模擬系統展覽會
(2012年3月23日/於:九州大學)

-
8DOF交通安全模擬器
-
8DOF交通安全模擬器 Traffic Safety Simulator
該模擬器系統是以3D虛擬模擬軟體UC-win/Road為基礎的高性能大型駕駛模擬器。
中國交通部為了研究交通安全,由交通運輸部公路科學研究院製作、搭建的大型駕駛模擬系統。在2009年1月的國際投標中由FORUM8單獨得標,系統最終於2014年2月完成驗收。

-
車輛性能驗證裝置高精確度駕駛模擬器
-
世界首發※1)、真正實現了在模擬(VR)空間內使用大型5面立體視覺的駕駛模擬器進行駕駛以及車輛行走模擬。透過逼真地模擬駕駛時的視覺環境、震動環境,可以實現模擬駕駛車輛的特性與靈敏度的檢測和數位模型的建立。 名古屋大學在2015年6月購買了這款駕駛模擬器。在Natinal innovation complex(NIC)內進行了設置。
>>車輛性能驗證裝置高精確度駕駛模擬器介紹(英文版)
(PDF、2,012KB)
●2016/02/16
BBC的採訪報導中介紹了世界首例4K5面立體視野DS(名古屋大NIC)。
※1)在目前(2015年6月)公開的模擬器中,世界首次將大型5面沉浸式顯示器和運動駕駛艙部相組合。

-
3DVR挖掘機遠端操縱系統
-
- 事前模擬・・・無需到現場,透過虛擬環境進行檢討和確認!
- 培訓/安全教育・・・體驗與實物相同的駕駛操作!也可用於培訓和安全教育。
- 作業監視/作業指南/作業指示・・・可以從任意地方下達任意且詳細的指示!
- 複數車輛控制・・・可以對多輛挖掘機進行協調控制與監控。
- 支援自動駕駛・・・自主駕駛系統的集中管理,也用於作為開發平台。
- 遠端操縱訓練模擬器(日本國土交通省九州地方發展局九州技術事務所)
- 3DVR聯動遠端施工系統(舊(獨)土木研究所技術推廣本部)
- 除雪車輛駕駛教育用車輛操作模擬器(中日本高速公路株式會社)
- 除雪車駕駛模擬器(株式會社NICHIJO)
- 礦山用自動駕駛模擬器(日立建機株式會社)
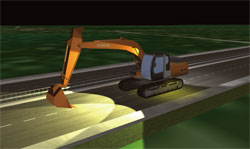
運用3DVR進行遠端的管理、監視、培訓和教育
運用3DVR(虛擬實境)系統對支援遠端控制和自動駕駛的挖掘機進行環境模擬、操作培訓和安全教育,以及對多個起重機的集成管理進行模擬驗證。當發生大規模災難時可以在危險區域遠端操作無人的挖掘機,也可用於定期培訓、安全培訓以及提高現場工作效率。在該系統中,透過再現挖掘機駕駛艙的控制設備和遠端控制設備並與連接3DVR系統,可以在3DVR空間中透過手動控制和遠端控制來控制實體的機器。
>>3DVR挖掘機遠端操縱系統介紹(日文)
(PDF、6,043KB)
特點
3DVR系統與遠端控制和自動駕駛的運用相關如下。

運用案例
-
UC-win/Road 客製化開發系統
-
- VR運動座椅
- Lily Car
- 超大型DS系統:由6軸+Yaw・軸以及全周8台投影集群構成
- UC-win/Road 自行車模擬器
- UC-win/Road 輪椅模擬器
- UC-win/Road 鐵路模擬器
- UC-win/Road 駕駛設備設置位置探討系統
- UC-win/Road 船舶駕駛模擬器
- 施工機械人機介面
細分化元件實現高度柔軟低成本的開發
●元件的變更/新增變得更加容易(駕駛模擬系統)
UC-win/Road車輛模型的變更,使用者硬體的變更和駕駛狀況的記錄輸出等的客制化開發事例等。使用從前的元件構成(右圖、去除新增事例)從通常的遊戲方向盤當中取得腳踏板和方向盤的操作量資料,計算車輛的運動。並且,還可進行與車輛的加速度和軌道獨立元件的計算,因此可進行車輛的引擎運動模型的客制化,路面和輪胎的粘著模型的需求對應。新增了「模擬踏板裝置輸入」和「踏板操作輸入切換」等元件,實現了遊戲控制器與其他硬體的共存及對應模擬裝備。最後,透過「日誌的取得和儲存」及新增元件,可獲得或輸出駕駛模擬系統相關資訊。
VR-Studio®中開發的高度化功能及新功能的使用
●新元件的開發/開發中產品的預取
為實現客制化新功能的開發,我們獨自開發基本技術,進行廣泛套裝軟體新功能的設計與開發。駕駛模擬的場景功能可以幫助顧客的專門技術的研發等。在虛擬場景中,可以進行駕駛模擬並透過事件觸發功能來採集駕駛員反映。還有,使用最新電腦繪圖技術和Shaders言語,積極開發地形材質處理和光源高級表現等技術。
與硬體結合實現高度模擬
●UC-win/Road駕駛模擬器運動平台
產品與硬體連接也可進行UC-win/Road駕駛模擬器的客制化等。
透過[運動平台]可以實現更加真實的駕駛體驗。DS的開發案例涉及有汽車研究、安全系統開發、訓練模擬器、廣告用模擬器和鐵路模擬器等多個領域。與硬體連接不但可以發揮即時3DVR的特點,也可生成多樣化的3D空間,以及自訂場景和觸發事件等各種模擬需求。
-
FORUM8 停車場解決方案
-
- 使用手機與平板電腦就可以進行停車場的搜索和預約的移動應用程式。
- 私人停車場、可停車的任意場所的所有者提供出資訊,想要停車的人就可以利用停車預約系統。
- 除了回避交通混雜、堵塞、減少排廢氣環境方面的考慮以外,人與人之間的合作互助、社區創造的推進,用戶的社會貢獻等方面上都有很好的效果。這就是將其命名為“有機”的理由。
- 不僅僅是停車位的確保。此服務會進一步最佳化使得參加賞花大會,煙火大會等各種活動時,可以順利取得位置。
- 基本功能:因為顯示了地圖,可以更加即時地顯示空位。對應收費停車場、道路上的停車空間,私人土地的空間。
- 使用者可以更新即時空位的狀態,離開停車場時也會通知有停車位空出的資訊,並且向正在尋求車位的用戶發送資訊。
停車場解決方案
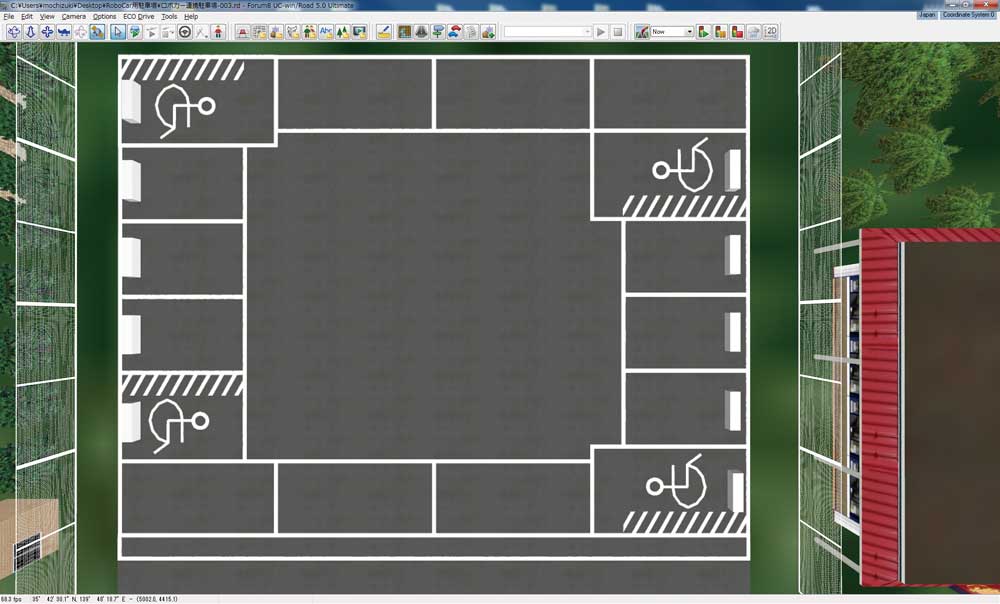
FORUM8公司提供各種解決方案,如將車輛軌跡圖製作/停車場/設計CAD與UC-win/Road連接實現停車場模型製作、VR模擬與RoboCar®同步實現自動停車系統、基於VR-Cloud®的停車場檢索與導航系統等。

■VR-Cloud® Parking NAVI系統的停車場預約流程
●Organic Parking
美國的Organic Parking公司所開發的服務,其理念是透過縮短尋找停車位的時間,使得交通混雜、堵塞得到緩解,從而進一步實現綠色社會。
此服務已經取得了美國專利,目前正在申請國際專利。此次FORUM8取得了其在 日本的獨家開發權,正在面向 日本國內市場為顧客進行定制。

▲掃描二維碼或點擊下載


-
UC-win/Road 車輛軌跡/停車場CAD連接自動停車系統
-
- 車輛軌跡製圖系統
本程式是基於《半拖車及全拖車的直角旋回軌跡圖的樣式(JASO Z 006-92)》等製圖理論的車輛行駛軌跡計算/製圖系統。利用本系統可以高效完成針對假設路線,現有路線的行駛模擬、車輛軌跡、車輛詳細狀製圖。 - 停車場製圖系統
基於《標準停車場條例、道踣結構令》等製圖理論支援符合停車場規範的停車場設計CAD系統。製作完成的停車場圖紙輸出為CAD資料在《車輛軌跡製圖系統》中使用。 - UC-win/Road
RoboCar® Auto parking plugin
提案系統
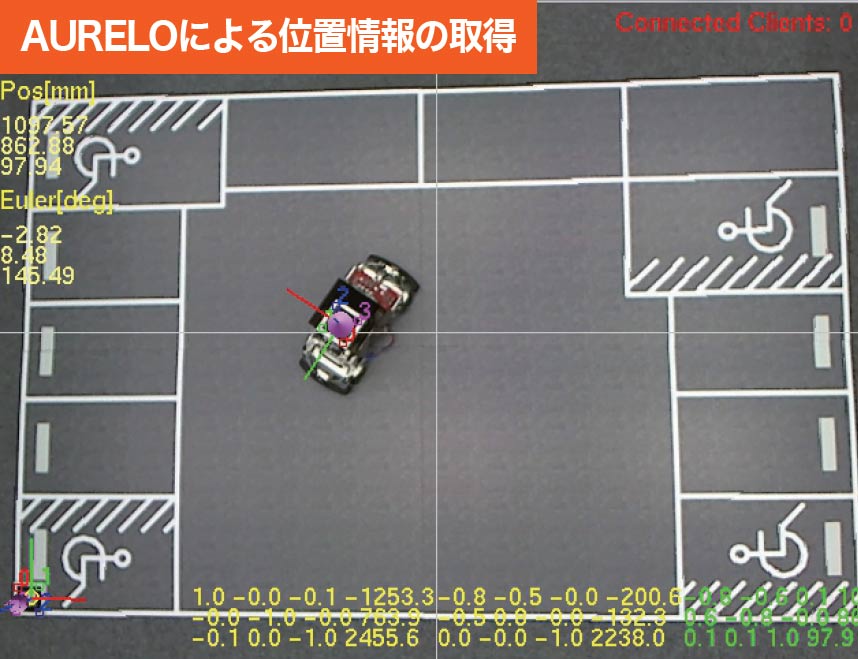
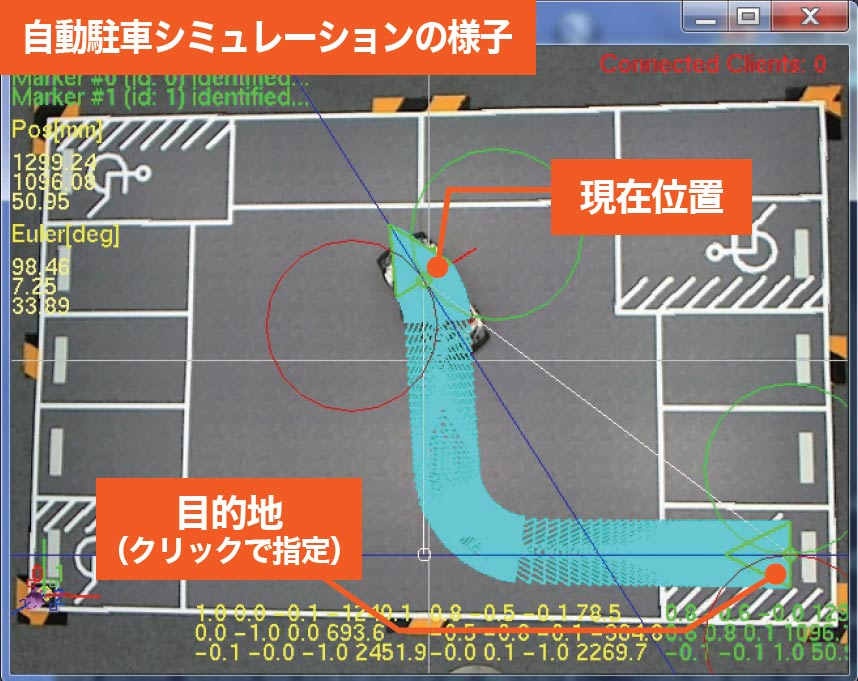
連接UC-win/Road與RoboCar,以攝影圖像與超音波感應器資訊為基礎實現停車時的方向盤自動作業系統。駕駛員在車外按下按鈕,車輛將自動完成停車操作。
車輛軌跡製圖/停車場設計/自動停車系統綜合解決方案
車輛軌跡圖製作以及停車場製圖/設計CAD連接實現3D/VR模擬。
並將其VR模型與RoboCar同步實現自動停車系統。

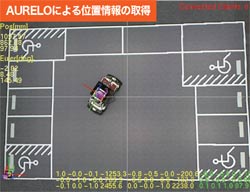

▲使用了AURELO的RoboCar®自動停車模擬

▲在UC-win/Road上中確認自動停車
▲停車場的VR表現
從任意的視點確認停車場狀態 - 車輛軌跡製圖系統


-
FORUM8 Robotics
-
- 鋼筋混凝土橋的近距離檢測
- 床面的近距離檢測
使用自動機器裝置的最新的解決方案
汽車機器人平台と和VR的融合
UC-win/Road可以短時間內輕鬆地製作大規模模擬空間。透過與RoboCar®連接,不僅僅是VR,可以用於混合現實的模擬器,可以期待各種模擬器的運用。
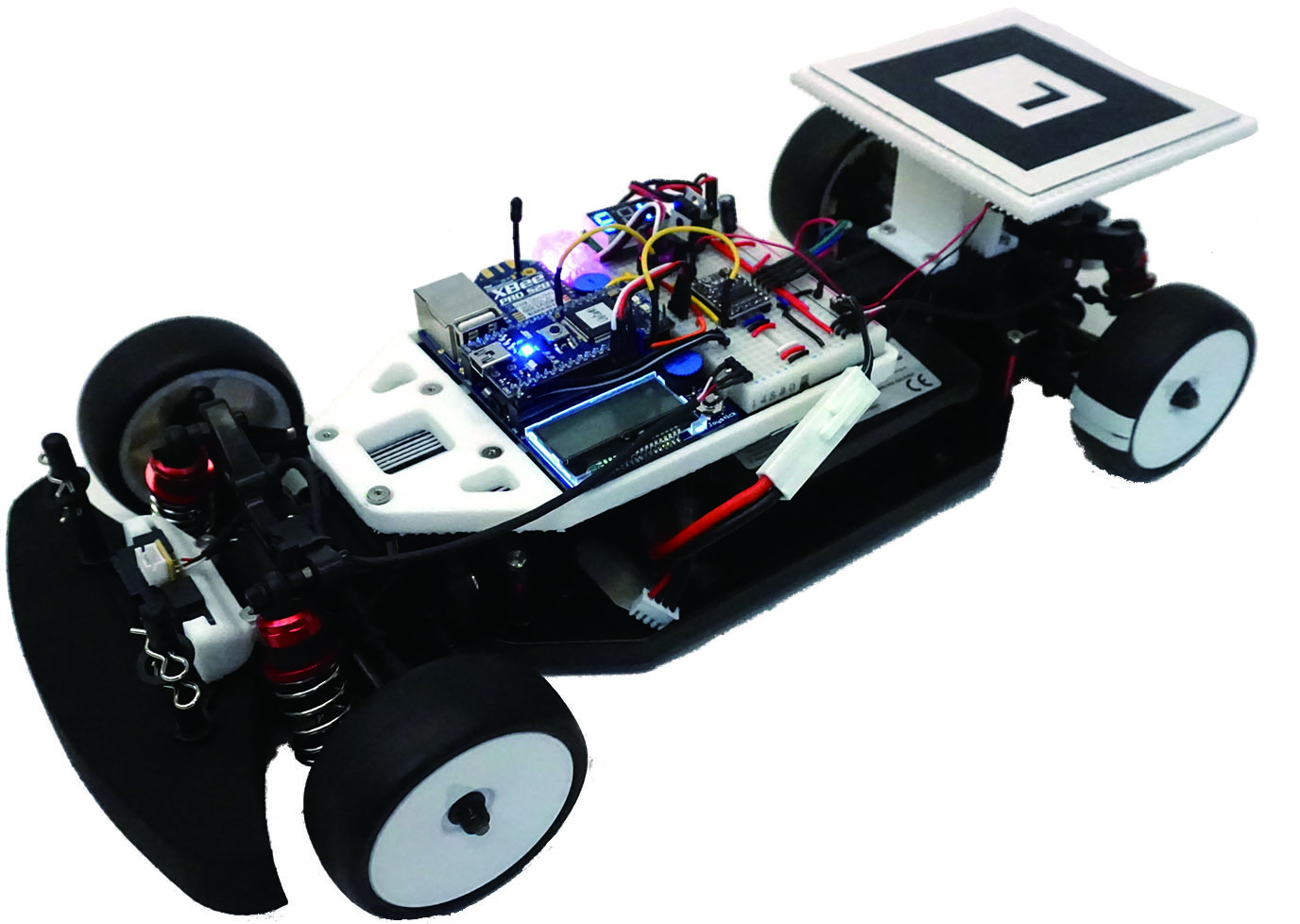
■RoboCar®
將駕駛模擬功能非常充實的現實模擬軟體UC-win/Road與搭載了汽車機器人平台的機器人技術相結合。在VR空間內的道路上駕駛體積為實車10分之一的模型車VR模擬系統。透過利用VR中的虛擬實境空間,可以表現出精緻的空間、多種多樣的交通環境、設置腳本進行實驗模擬。
■UC-win/RoadとRoboCar®的連接
UC-win/Road中可以表現精密的空間、各式各樣的交通環境、設定腳本並進行駕駛模擬。其次,RoboCar®的特點是可以在現實空間內行駛體積只有實車10分之一的模型。透過結合這些特點,可實現在虛擬實境環境中無法驗證的混合現實的模擬。

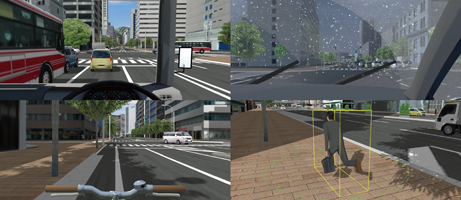
▲在模型中製作駕駛環境(左圖)

▲在VR空間內進行模擬駕駛(右圖)
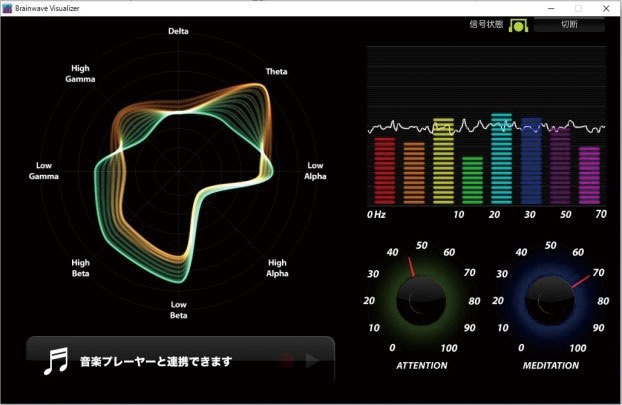
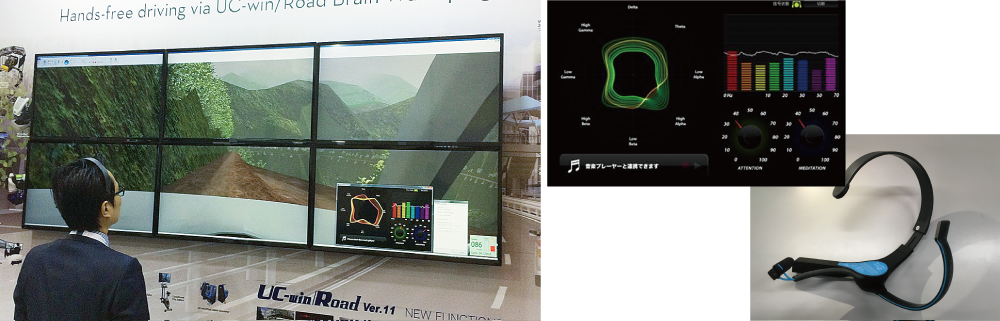
●Mind&VR UC-win/Road for MindWave Mobile
使用腦電波測試裝置MindWave Mobile在UC-win/Road上進行駕駛模擬
MindWave Mobile(開發公司:NeuroSky)是裝載了腦電波感知器的無線身歷聲裝置。戴上它,會測出alpha、beta等不同頻率的腦波。並且透過獨自的演算法把腦電波與注意力集中程度、放鬆程度等心理狀態進行轉換。 MindWave Mobile外掛程式與VR資料項目結合,運用所取得的資料可以進行操作模擬。左圖的駕駛模擬是透過主力已的集中度來控制速度,如果凝視畫面中的一個點速度就會變快,注意力散漫的話速度就會變慢。

▲MindWave Mobile(Neurosky)
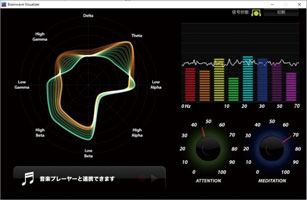
▲MindWave Mobile(Neurosky)
■運用案例
腦電波Driving ~運用脳波進行駕駛操縱!~
UC-win/Road MindWave Mobile外掛程式
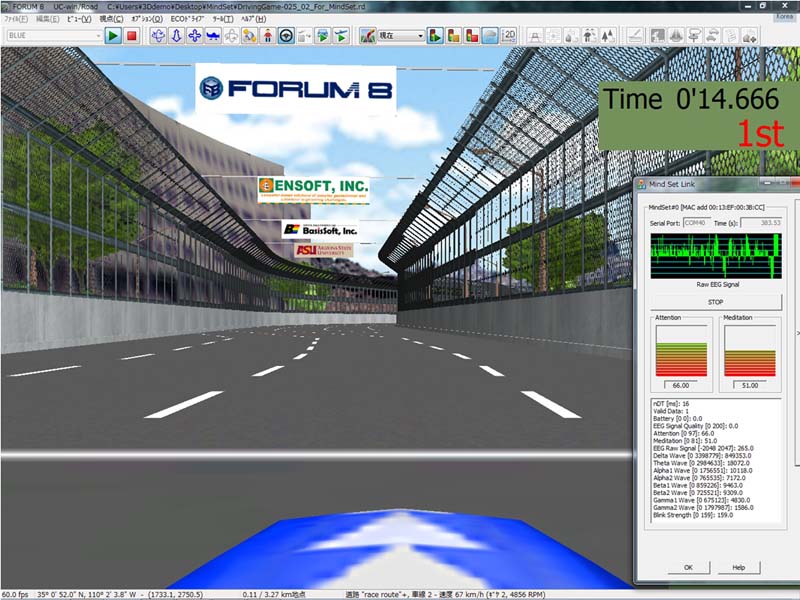
戴上MindWave Mobile,在連接狀態下開始駕駛模擬可以根據腦電波來控制車輛的油門跟煞車。

F1賽道
作為EEG技術應用事例列舉了F1賽道。即時(@60Hz)讀取2套MindSet設備,開發了可抽出Meditation和Attention係數的介面。

▲Phoenix F1 circuit

▲具有遊戲性,作為展示用系統受到好評
●自主飛行UAV
自主飛行監控系統
■透過滑鼠、鍵盤進行操作通訊資訊等資料利用Wi-Fi進行無線傳輸
■透過內置電腦自動控制平衡。上升、下降、前後左右的移動等高難度動作可簡單實現
■使用前置照相機、高速照相機確認,可透過FLY-DV照相機進行詳細記錄
■透過GPS測定AR.Drone的位置
■透過9D0F IMU (軸慣性計測裝置/Inertial Measurement Unit),測定加速度、陀螺儀、地磁氣,確認AR.Drone的方向
■透過紅外線測距感測器避難與障礙物發生衝突

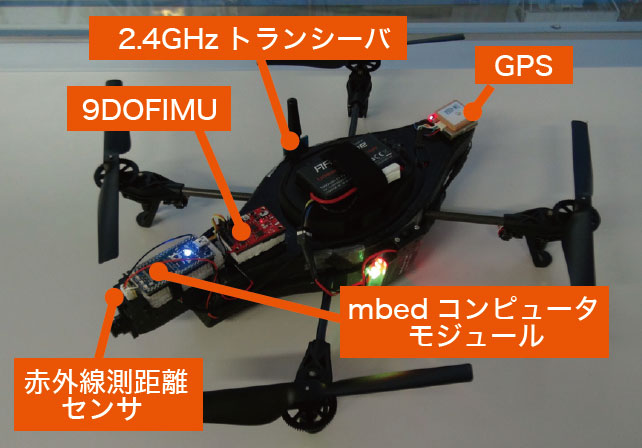
▲自訂AGUL

▲AGUL測試飛行的樣子


使用無人機(Drone)製作廣闊範圍的地理資料



在日本國土交通局的新世代社會基礎設施機器人現場檢測物件技術中無人機被採用。(2014年7月10日)
橋樑維持管理領域[利用與3DVR連接的自主飛行型UAV的建築物調查系統]
得標項目

▲自訂自主無人機
▲3DVR和自主無人機的連接
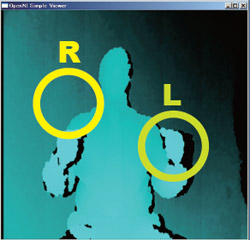
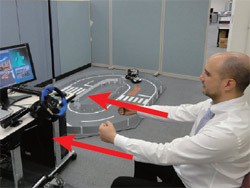
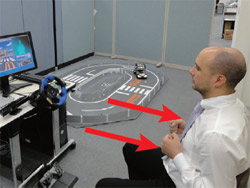
●Kinect™駕駛模擬器模擬器
透過紅外線深度感測器進行UC-win/Road駕駛操作的系統
在Kinect前面像操舵操作一樣進行UC-win/Road駕駛操作的系統。
Kinect™將檢測駕駛員雙手的位置資訊並轉換為車輛的操舵、油門和煞車。
透過紅外線深度感測器進行車輛控制和駕駛操作的示意
在Kinect前面像操舵操作一樣進行UC-win/Road駕駛操作的系統。Kinect™將檢測駕駛員雙手的位置資訊轉換為車輛的操舵、油門和煞車。

▲方向盤操作(右轉彎・左轉彎)
▲油門操作
▲煞車操作
●UC-win/Road Air Driving 應用技術
無需控制設備實現細緻、高精度的駕駛操作。
骨架識別
紅外線深度感應器透過距離資訊檢測出同一物體來識別人體特徵。採取特定的舉動時會進行校正識別骨架結構。

▲Kinect(TM)感測器
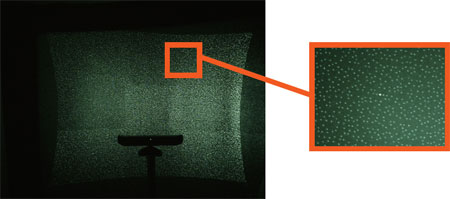
▲紅外線雷射的情況
方向盤的方向以及轉向量的檢測
從出拳的左右手的位置來檢測出左轉、右轉的方向以及角度的模擬值。檢測量從綠色到紅色的變化顯示在變化棒上。越接近紅色說明越受到控制。
油門、煞車的踩踏量測出
從腳趾的位置開始檢測踩踏量模擬值
●油門:檢測結果顯示向上。
●煞車:檢測結果顯示向下。

▲前進

▲右轉彎:向右幅度越大
右方的紅色條形就會越多。
●使用紅外線深度感應器的多集群數位標牌系統
多畫面6K顯示器和利用紅外線深度感測器的互動操作(雙向)數位標牌系統。
利用手勢、動作可進行直觀操作。
手勢介面與運動捕捉功能可以互動地操作。輸入使用Xtion PRO紅外線深度感測器。透過直觀的操作,與傳統的互動標牌相比較可以期待更高的集客率。我們也提供多集群系統與UC-win/Road的集群功能的即時VR模擬,使用了超級雲®的CG渲染服務等相關的服務。

▲6K數字標牌ジAirDriving
(東京Gameshow2011)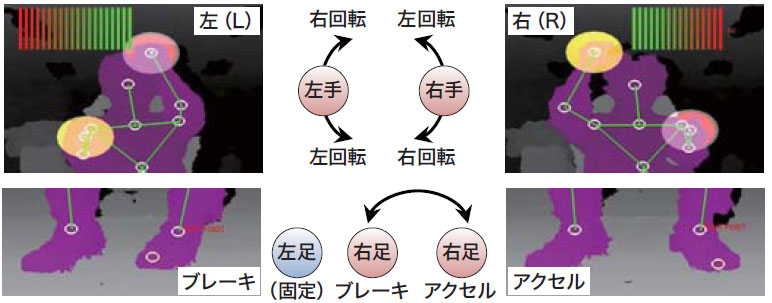
▲AirDriving 介面

新的解決方案服務[超級電腦®]
運用超級電腦的高級演算性能,提供大規模的分析、模擬、CG渲染等服務
■ UC-win/Road・CG動畫服務
[超級電腦® CG動畫服務]是用POV-Ray提供製作成的高度精細的視頻檔案。透過使用超級電腦可以製作更加高度精細的視頻檔案。由於使用了POV-Ray,在UC-win/Road匯出後指令檔可以用editor等進行修正。
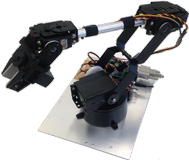
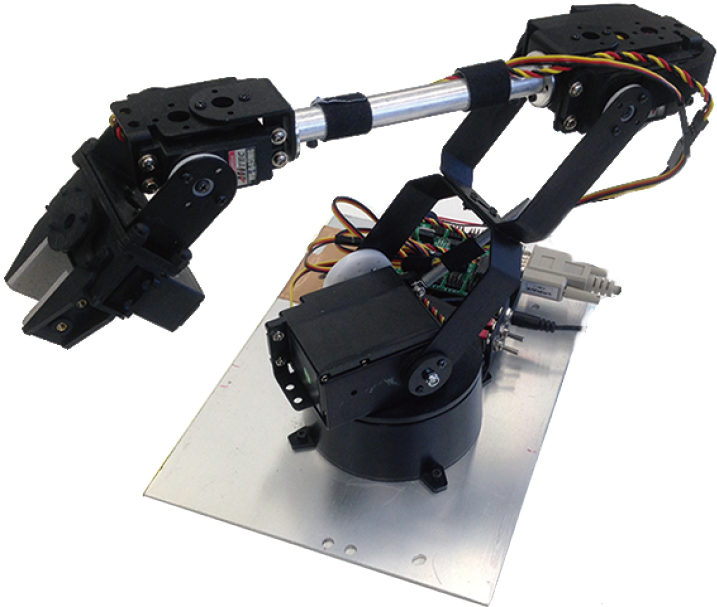
●UC-win/Road for Robot Arm
虛擬空間與現實空間裡的機器手臂相結合做出動作。
●Lily Car
與VR相結合的模型車自主行駛系統
Lily Car是縮小的自主行駛模型車,將實車的舉動在較小空間內模擬,對開發小型的自動駕駛車非常地有幫助。
讓車在實現制定路徑的實驗場地上自主行駛。可以隨時切換手動模式個自動駕駛模式,與電腦的控制介面和Aurelo系統連接,可以取得各車輛的位置與方向資訊。並且,對車發送適當的指令的話就可以讓它在所選的路徑裡行駛。
Lily Car系統結構
・1/10 RC Car的機體外殼 ・引擎 ・方向盤引擎
・碰撞判定所使用的紅外線感知器 ・車輛追蹤用AR標記
・電腦遠端操作時用作交流和控制的無線模組
・管理整個系統的主控制器





-
MR/AR
-
- 利用UC-win/Road可以在3D立體顯示中使用即時模擬資訊。
- 無需偏光眼鏡雖然有些取決於物件大小,但很多可以結合各種資訊使用,如KIOSK(廣告塔) (即時運行的資料打造物件強烈的視覺效果)
●MR : Mixed Reality - 混合現實 ●AR : Augmented Reality - 增強現實
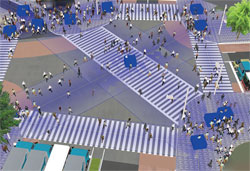
渋谷交叉口群集模型與交互性設備 Development of Linking System for VR and Interactive Devices
Mr. Taro Narahara (哈佛大學大學院、美國)
將實際捕捉到的人物動作導入模型,可逼真地在UC-win/Road中進行項目再現。
此次,透過將該技術與我公司的外掛程式共同開發,實現模擬和UC-win/Road的即時連接,Mr. Narahara對即時的互動式結構進行了說明。


▲IVR展會

▲第3屆國際VR研討會發表
3D立體系統裸眼立體映射系統
3D 立體視圖系統構築例
無需眼鏡的立體映射。實現模型和立體映射的合成。
■什麼是3D-B-Vision?
3D-B-Vision是指混合現實/增強現實(Mixed Reality, MR/Augmented Reality.AR),硬體系統。
利用在現實空間(物理空間)重疊顯示數位資訊功能的AR正在成為普遍的技術。3D-B-Vision正是實現了數字資訊的3D立體CG的格式的顯示。該資訊能夠顯示在建築模型以及模型等其他的物理物件上。系統只需將2個小型投影機按照兩眼距離隔開設置即可實現3D立體顯示效果,不需要專門的眼鏡。使用者可以透過透明視窗確認物件物體。並且使用overhead的silver screen設置3D立體圖片並立刻確認。3D-B-Vision的立體投影,結合汽車、行人和其他動作的物件可以實現高效的演示。


▲普通的3D立體系統圖
■優點

▲開發:(有)石川光學造形研究所http://www.holoart.co.jp/
UC-win/Road 視線追蹤系統
可以測量視線資訊資料的穿戴設備。
使用UC-win/Road可以與VR空間內的駕駛模擬進行連接。
※需要另外訂製。


Eye Tracking Glasses Option
可將人的視線[視覺化]的視線追蹤眼鏡。

取樣速率 60Hz or 30Hz 校準 0, 1, 3 點(3種) 錄音麥克風 ○ 場景攝像機(解析度) 1280x960p @24 fps
960x720p @30 fps場景攝像機記錄角度 橫80°縱60° 連續記錄時間 (PC) 2小時 (Galaxy) 2小時 記錄容量 (PC) 18小時 (Galaxy) 20小時 重量(眼鏡) 47g 重量(Galaxy) 176g 尺寸(眼鏡) 135 x 69 x 23 mm 注視點精確度 0.5° 組成零件
・60Hz binocular Eye Tracking Glasses with HD scene camera
・ETG專用眼鏡框(3D)
・Row資料存取SDK
・錄音軟體iView的授權
・VRPN Server
Eye Tracking HMD based on HTC Vive Option
SMI公司以HTC Vive為基礎所製作的,向250Hz的高性能模型附加視線資訊。

視線追蹤 追蹤 250Hz(雙眼) 追蹤範圍 最大視野(110°) 視點精度 0.2° 校準 1,3,5 點(3種) 測量資料 螢幕上的注視點
(左、右、雙眼)瞳孔間距(IPD) 注視基準點、注視軌跡
頭戴設備硬體 HTC Vive
耳機&播放機的連接
(連接前不需要調整)、USB頭部物件 視線追蹤
模組部分 55g
操作設備系統要求 HTC Vive認證的電腦 OS Windows10 64bit 組成部件
・HTC公司的Vive VR眼鏡/附屬部件
・Binocular Eye Tracking at 250 Hz(內置模組)
・Row資料存取SDK
・Unity專用外掛程式、WorldViz Vizard、Unreal Engine
・錄音軟體iView的授權
・VRPN Server
※上述的規格可能根據產品改良發生變更,如果沒有及時在網上公佈,請見諒。
開發:SMI公司 https://www.smivision.com/
HMD系統 頭戴式顯示系統
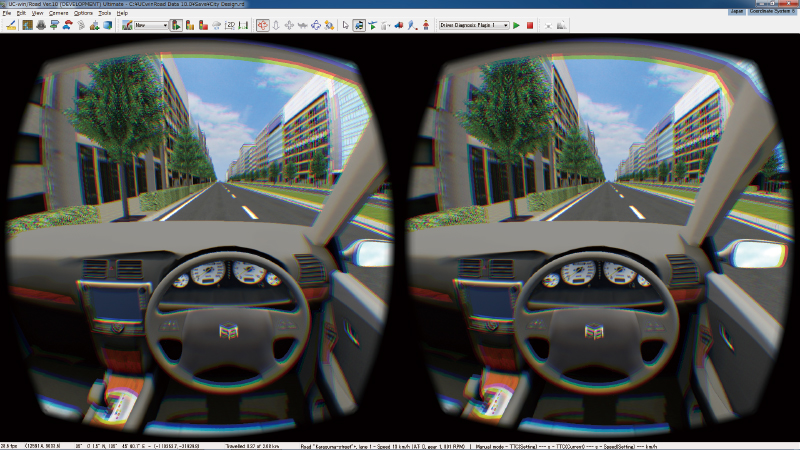
使用Oculus Rift輸出3D畫面
擁有非常廣闊的視野,內藏感知器實現了頭部追蹤
■Oculus Rift
美國的Oculus VR公司所提供的開發套件,擁有內藏感知器和廣闊視野的3D畫面輸出功能的頭戴式顯示器(HMD:Head Mounted Display)。並且,與以前的HMD相比較價格更加地實惠。
■顯示
Oculus Rift作為HMD,它的視野寬度非常優越。在魚眼模式的螢幕上,雖然戴上的時候液晶本身是平面的,但用此設備觀看時眼前所呈現的是半球狀的投影螢幕。再加上左右眼的視覺差所生成的立體視覺,增加了VR空間內的沉浸感。以前的HMD為了呈現正常的畫面,會在光學系統上下功夫,來抑制眼鏡片的彎曲。Oculus Rift是將畫面資源進行渲染,使得彎曲的鏡片也能正常地觀看。
■UC-win/Road Oculus Plugin
收集Oculus Rift的感知資料,結合使用者的頭部運動便可以追蹤UC-win/Road裡的視點。也可以透過矯正失真圖像的設置來適應鏡片。

▲Oculus Rift DK2
▲Oculus Plugin的立體影像


-
UC-win/Road 模型VR系統
-
透過模型VR的連接進行模擬/演示的系統連接
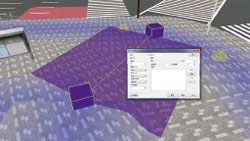
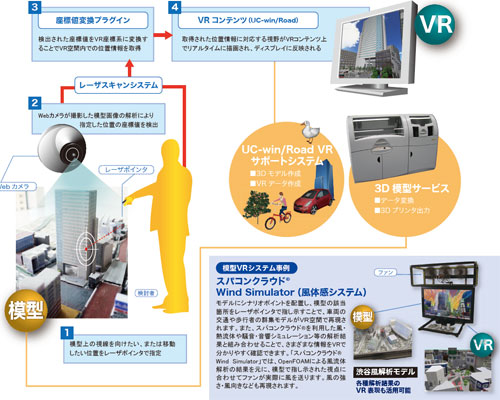
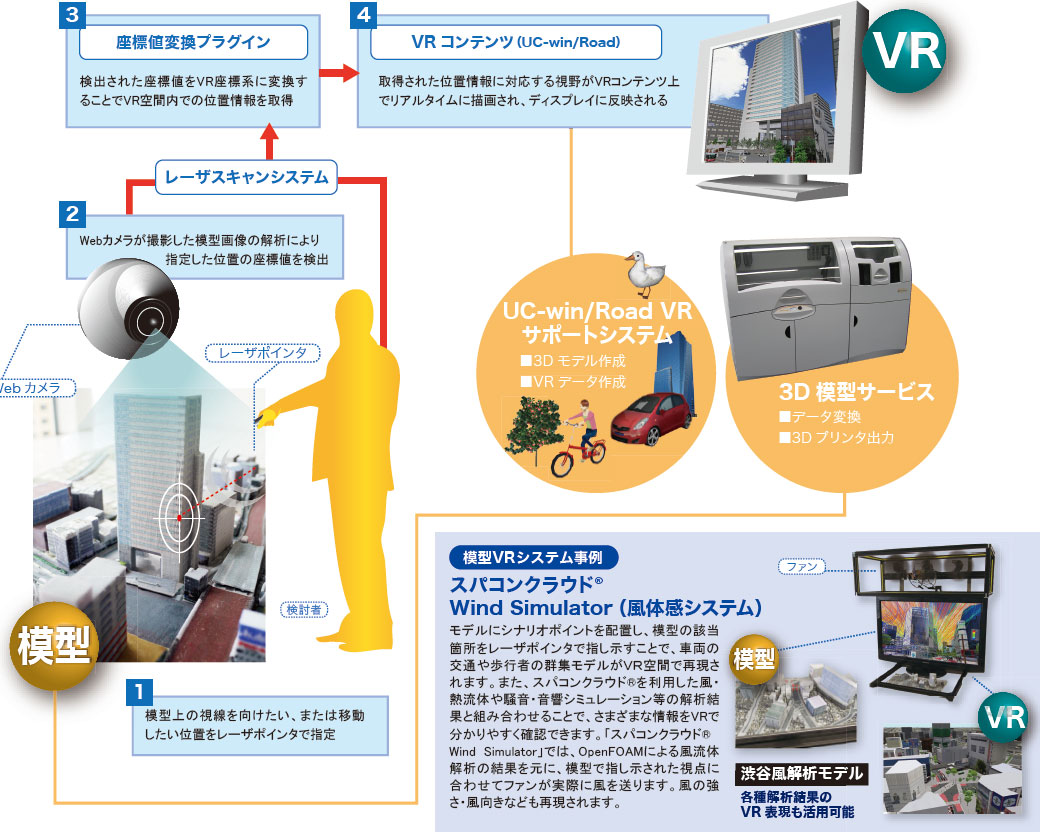
[UC-win/Road模型VR系統]由W16成員之一的大阪大學大學院福田知弘准教授的知識和技術協力開發而成。將模型和VR的視野資訊連接,透過提供一體化操作環境技術,將雙方的長處結合形成的新型模擬演示系統。在專業性和知識水準方面,對於各類相關人員可淺顯易懂地傳遞資訊,高效推進規劃討論和共識達成。
詳情 >> UC-win/Road模型VR系統(Up&Coming '11 春季刊)
技術協力:大阪大學環境資源工學專攻、福田知弘 副教授
■模型和VR優點結合的討論工具
VR的優點:高度的靈活性和表現力,在交通流的表現、天氣條件的變更等可進行模型無法實現的各類討論。
模型的長處:距離、規模等在規劃整體把握方面,模型更有直感。並且,多人可同時從任意視點進行討論,便於一次性把握城市整體,討論者可以直接接觸也是模型的優點所在。
■在VR上描繪模型中指定希望討論的視點
與VR單體相比更加直觀,規劃討論時更加容易操作。使用雷射指標透過在模型上指明希望討論的視點,可在VR空間內移動及變更視線方向。系統由模型、網路攝影機、雷射指標、VR軟體[UC-win/Road],顯示VR空間的播放機構成,透過雷射指針的操作檢測出位置,並將檢出到的資訊傳遞給UC-win/Road最終反應到VR空間。
■[中目黑安全安心地圖]模型VR系統在展示廳中展示
使用了FORUM8本社所在地中目黑地區模型的提案系統。模型和VR—體化作為[地域的安全安心地圖],還可確認地下的基礎設施治理狀況、大樓內部空間等,可用於城市客製化開發、城市治理中達成共識等目的。
■系統提案及預算
F0RUM8根據客戶的需求準備了UC-win/Road模型VR系統的提案及預算。此外,利用UC-win/Road支援系統,還可根據客戶的需求製作3DVR模擬數據。製作的VR資料如果應用於[3D模型服務],UC-win/Road的VR資料可透過3D印表機段時間內輸出實物模型,由此可高效地構築模型VR系統。
報價示例:[中目黑安全安心地圖]模型VR系統 使用FORUM8本社所在地中目黑地區模型的提案系統。模型和VR一體化作為[地域的安全安心地圖],還可確認地下的基礎設施治理狀況、大樓內部空間等,可用於城市客製化開發、城市治理中達成共識等目的。
■VR資料製作 : 約18萬NTD ※ 報價僅供參考 ■3D模型製作 : 約23萬NTD ※ 報價僅供參考
※包含購買ARToolKit、網路攝影機、雷射指針、桌上型電腦、42寸顯示器、UC-win/Road Advanced 1套、UC-win/Road客製化開發、技術諮詢等費用
總計 約90萬NTD ※ 報價僅供參考

▲[中目黑安全安心地圖]

▲中目黑車站前

▲目黑銀座商店街
▲系統組成簡介



-
3D投影映射
-
- 位置:屋外、環境光較少的暗處、投影、設置都不會對交通、近鄰產生影響的私有用地
- 投影對象:塔狀建築物,簡單的立方體構成
- 建築物尺寸:W11m x D6m x H20m
- 建築物材質:磚(茶色/非光澤)
- 投影位置數:最大從2個位置投影
- 投影距離:約15m(A附近)約40m(B遠處)
- 作品長度約3分鐘,映射、音響(附選曲、MA)
- 映射音響器材租賃期間3天 (準備1天/正式使用2天)
- 含現場測試
- 含企劃(進行製作管理)
- 含器材搬運、設營、調整
- 含操作人員、映射音響技術人員
- 外地交通費、住宿費另計
- 不含架台製作費、吊車利用費等
- 實現了3D模型周圍全體映射,超越了全息圖的立體顯示裝置。 <2016年3月30日 最新資訊>
- Projection Mapping Table <Up&Coming No.108 '15 新年號 [3D相關新聞]>
建築空間和映射的融合及應用VR的投影討論
FORUM8公司提供3D投影映射等利用3D資料以及映射的最先進的空間表現服務。
協力 : 一般財團法人 最先端表現技術利用推進協會


▲錦帶橋投影映射[時空的橋樑](2015.5.30)

▲芝浦工業大學裡實施的投影映射
(2015.9.10)
▲利用VR資料
進行投影映射影像確認
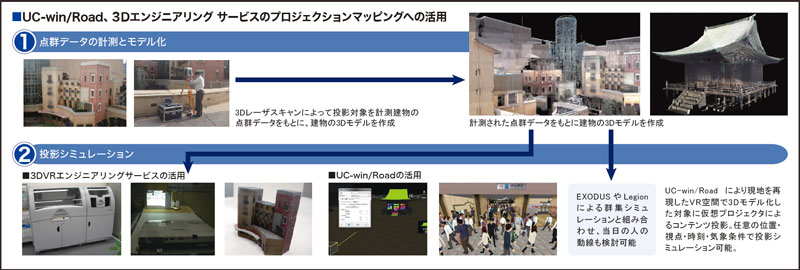
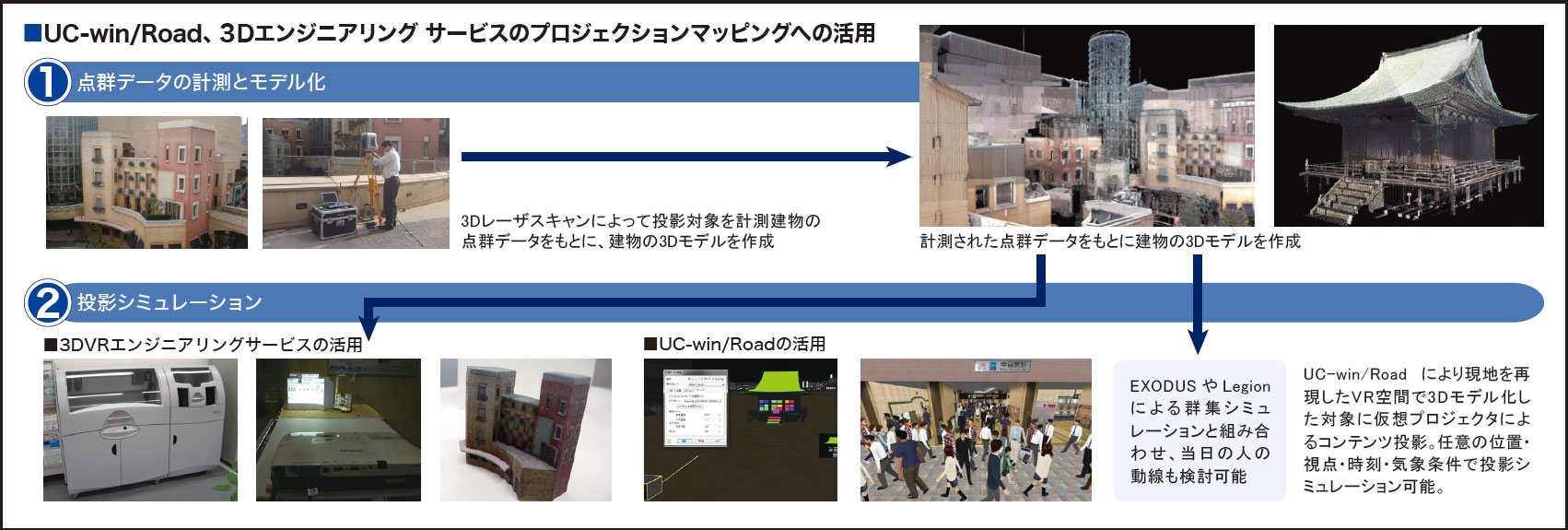
應用VR的投影模擬
透過應用UC-win/Road、3D工程服務的投影模擬,可事前確認比例尺模型、VR資料的效果。對內容的討論、確認、會面、面向甲方的說明,還可利用於活動的事前、事後展示宣傳。
模型投影計畫示例
計畫案例

▲2台組成
模型投影計畫一覽(2D,3D內容)
※音響費用:包含模型投影中音響器材和音響內容的合計約6萬人民幣。
※包含3D動畫內容+音響
器材組成 投影器1台 投影器2台 10000流明
影像投影機30萬NTD ※ 報價僅供參考 42萬NTD ※ 報價僅供參考 20000流明
影像投影機40萬NTD ※ 報價僅供參考 48萬NTD ※ 報價僅供參考
Projection Mapping Table
利用UC-win/Road和3D模型,進行周圍全體映射的設計模擬系統。
案例:格子質地的映射事例和實車質地的映射案例


▲格子材質


▲真實汽車的材質


-
IM&VR
-
BIM/CIM在建築、土木中追求將各類資訊綜合到模型,並對其資訊製作、管理和應用。從設計、施工、維護管理作為1個模型來考慮,除2D3D圖紙製作外,包含 材料規格、數量、概算施工費、管理資訊等,透過將所有資訊統一管理,可對建築物、結構物的生命週期所需的全部資訊進行連續設計和表現。
此外,透過對各類解析、VR的解析結果視覺化模擬等在內,作為土木建築行業全新的商業模式,FORUM8致力於『IM&VR解決方案』的推廣。
詳情 >>IM&VR
-
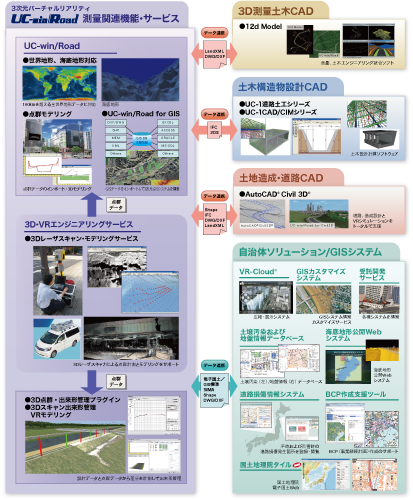
FORUM8 測量解決方案
-
GIS/3D雷射掃描/3D測量土木綜合解決方案
我們提供使用3D雷射掃描進行點雲測量和在UC-win/Road中運用點雲資料製作VR模型等服務。我們提供3D測量CAD/土木結構物設計CAD與VR進行資料交換,GIS和VR連接進行系統構築等綜合測量解決方案。
-
UC-win/Road 駕駛模擬器
-
- 可透過UC-win/Road製作自訂的駕駛環境
- 提供標準外掛程式包
- 提供標準VR資料、支援場景自訂
- 使用Visual Option Tools重現各種環境
- 車身硬體透過量產OEM實現低價
- 通過客制化滿足高級模擬需求
在理想的駕駛環境中,可以重複生成和複製各種駕駛環境。
近年來,駕駛模擬器已廣泛應用於車輛系統開發、ITS交通系統研究、駕駛員、汽車、道路和交通的交互研究。
-
UC-win/Road 駕駛模擬器
-
- 可透過UC-win/Road製作自訂的駕駛環境
- 提供標準外掛程式包
- 提供標準VR資料、支援場景自訂
- 使用Visual Option Tools重現各種環境
- 車身硬體透過量產OEM實現低價
- 通過客制化滿足高級模擬需求
在理想的駕駛環境中,可以重複生成和複製各種駕駛環境。
近年來,駕駛模擬器已廣泛應用於車輛系統開發、ITS交通系統研究、駕駛員、汽車、道路和交通的交互研究。
產品價格
-
軟體價格
-
■軟體價格
產品名稱 價格 UC-win/Road Ver.17 Ultimate OPEN UC-win/Road Ver.17 Driving Sim OPEN UC-win/Road Ver.17 Advanced OPEN UC-win/Road Ver.17 Standard OPEN UC-win/Road Ver.17 CIM Lite OPEN UC-win/Road Ver.17 Multi User Client Version OPEN UC-win/Road Ver.17 Presentation Version OPEN UC-win/Road Ver.17 Cluster Client Version OPEN UC-win/Road Ver.17 Free Viewer Version 免費 VR-Cloud® 免費 glTF Viewer 免費 ■浮動授權價格
額外支付定價的40%,可以在任意地點和任意電腦使用。
產品名稱 價格 UC-win/Road Ver.17 Ultimate OPEN UC-win/Road Ver.17 Driving Sim OPEN UC-win/Road Ver.17 Advanced OPEN UC-win/Road Ver.17 Standard OPEN UC-win/Road Ver.17 CIM Lite OPEN UC-win/Road Ver.17 Multi User Client Version OPEN UC-win/Road Ver.17 Presentation Version OPEN UC-win/Road Ver.17 Cluster Client Version OPEN UC-win/Road Ver.17 Free Viewer Version 免費 VR-Cloud® 免費 glTF Viewer 免費
>>點擊查看授權詳情
升級
-
升級價格
-
版本名稱 產品名稱 價格/類別 備註 UC-win/Road Ver.17 Ultimate UC-win/Road Ver.17 Driving Sim 請洽業務人員 升級
- UC-win/Road Ver.17 Ultimate UC-win/Road Ver.17 Advanced 請洽業務人員 升級
- UC-win/Road Ver.17 Driving Sim UC-win/Road Ver.17 Standard 請洽業務人員 升級
- UC-win/Road Ver.17 Advanced UC-win/Road Ver.17 Standard 請洽業務人員 升級
- 訂閱價格
-
訂閱價格
-
■服務內容
・免費提供版本升級 ・電話技術諮詢服務
・諮詢服務(電子郵件、FAX) ・下載服務 ・維護資訊傳送服務
產品名稱 第1年訂閱費用 往後每年 訂閱(UC-win/Road Ver.17 Ultimate) 免費 請洽業務人員 訂閱(UC-win/Road Ver.17 Driving Sim) 請洽業務人員 訂閱(UC-win/Road Ver.17 Advanced) 請洽業務人員 訂閱(UC-win/Road Ver.17 Standard) 請洽業務人員 訂閱(UC-win/Road Ver.17 CIM Lite) 請洽業務人員 訂閱(UC-win/Road Ver.17 Multi User Client Version) 請洽業務人員 訂閱(UC-win/Road Ver.17 Presentation Version) 請洽業務人員 訂閱(UC-win/Road Ver.17 Cluster Client Version) 請洽業務人員 訂閱(UC-win/Road Ver.17 Ultimate 浮動授權) 請洽業務人員 訂閱(UC-win/Road Ver.17 Driving Sim 浮動授權) 請洽業務人員 訂閱(UC-win/Road Ver.17 Advanced 浮動授權) 請洽業務人員 訂閱(UC-win/Road Ver.17 Standard 浮動授權) 請洽業務人員 訂閱(UC-win/Road Ver.17 CIM Lite 浮動授權) 請洽業務人員 訂閱(UC-win/Road Ver.17 Multi User Client Version 浮動授權) 請洽業務人員 訂閱(UC-win/Road Ver.17 Presentation Version 浮動授權) 請洽業務人員 訂閱(UC-win/Road Ver.17 Cluster Client Version 浮動授權) 請洽業務人員
外掛程式/對應表
-
外掛程式/對應表
-
外掛程式名稱 Ultimate
Driving Sim
Advanced
Standard
CIM Lite
價格 駕駛模擬器外掛程式
(包含SensoDrive Simulator外掛程式)● ● - - - 請洽業務人員 ECO駕駛外掛程式 ● ● - - - 請洽業務人員 重播外掛程式 ● ● - - - 請洽業務人員 LOG輸出外掛程式 ● ● - - - 請洽業務人員 腳本外掛程式 ● ● ● - - 請洽業務人員 通訊外掛程式 ● ● ● - - 請洽業務人員 微觀模擬播放機外掛程式 ● ● ● - - 請洽業務人員 停車場模型導入外掛程式 ● ● ● - - 請洽業務人員 VR-Cloud®外掛程式
(包含a3S SDK伺服器授權)● ● ● - - 請洽業務人員 VR-Cloud®腳本外掛程式
(VR-Cloud® SDK的功能)
※必備VR-Cloud®外掛程式● ● ● - - 請洽業務人員 VR-Cloud®collaboration外掛程式
※必備VR-Cloud®外掛程式● ● ● - - 請洽業務人員 點雲模型外掛程式 ● - ● - - 請洽業務人員 Civil 3D外掛程式 ● - ● - - 請洽業務人員 EXODUS外掛程式 ● - ● - - 請洽業務人員 GIS外掛程式 ● - ● - - 請洽業務人員 InRoads外掛程式 ● - ● - - 請洽業務人員 OSCADY PRO外掛程式 ● - ● - - 請洽業務人員 xpswmm外掛程式 Ver.2 (for Tsunami) ● - ● - - 請洽業務人員 噪音模擬外掛程式 ● - ● - - 請洽業務人員 3D模型輸出外掛程式 ● - ● ● ● 請洽業務人員 DWG工具外掛程式
※必備3D模型輸出外掛程式● - ● ● ● 請洽業務人員 IFC外掛程式 ● - ● ● ● 請洽業務人員 12d Model外掛程式 ● - - - - 請洽業務人員 孟塞爾色系輸出外掛程式 ● - - - - 請洽業務人員 免費瀏覽輸出外掛程式 ● - - - - 請洽業務人員 海嘯外掛程式 ● - - - - 請洽業務人員 OHPASS外掛程式 ● - - - - 請洽業務人員 OSM外掛程式 ● - ● ● ● 請洽業務人員 線上地圖讀取外掛程式 ● - ● ● ● 請洽業務人員 Oculus Rift外掛程式 ● - - - - 請洽業務人員 外掛程式名 Ultimate
Driving Sim
Advanced
Standard
CIM Lite
價格
單賣外掛程式選項
-
單賣外掛程式選項
-
單賣外掛程式選項名 價格 運動平台外掛程式・選項(系統選項) ※4 請洽業務人員 D-BOX外掛程式・選項 請洽業務人員 輪椅模擬器外掛程式・選項 NEW! 請洽業務人員 摩托車模擬器外掛程式・選項 NEW! 請洽業務人員 VR座椅介面外掛程式・選項 請洽業務人員 遠端存取外掛程式・選項 請洽業務人員 模擬即時介面選項 請洽業務人員 HIL介面選項 ※4 請洽業務人員 RoboCar®外掛程式・選項 請洽業務人員 Aimsun介面外掛程式・選項 請洽業務人員 OpenFlight介面・選項 請洽業務人員 DS路線轉換外掛程式・選項 請洽業務人員 Legion介面外掛程式・選項 請洽業務人員 Simulink介面外掛程式・選項 請洽業務人員 駕駛診斷外掛程式・選項 請洽業務人員 方向盤扭矩・選項 ※4 請洽業務人員 cycleStreet介面外掛程式・選項 請洽業務人員 集群外掛程式・選項 ※5 請洽業務人員 HUD(虛擬顯示螢幕)外掛程式・選項 請洽業務人員 儀錶盤顯示(獨立的監視器顯示)外掛程式・選項 請洽業務人員 FOVE外掛程式・選項 請洽業務人員 HTC VIVE外掛程式・選項 請洽業務人員 Mindwave介面外掛程式・選項 請洽業務人員 照相機感測器基本外掛程式・選項 請洽業務人員 照相機感測器介面・選項 ※4 請洽業務人員 Log資料UDP接收・選項 請洽業務人員 CAN訊號介面・選項 ※4 請洽業務人員 A/D Board介面・選項 ※4 請洽業務人員 3D點雲成形管理外掛程式・選項 請洽業務人員 照片處理擴展外掛程式・選項 請洽業務人員 SfM (Structure from Motion)外掛程式・選項 請洽業務人員 雷射感測器・選項 ※4 請洽業務人員 土石流模擬外掛程式・選項 請洽業務人員 Rhino®外掛程式・選項 請洽業務人員 Kinect外掛程式・選項 請洽業務人員 UAV無人機外掛程式・選項 請洽業務人員 環境評估外掛程式・選項 請洽業務人員 噪音模擬外掛程式・選項 超級電腦・選項 請洽業務人員 超級電腦雲端®流體分析介面外掛程式・選項 請洽業務人員 VISSIM介面外掛程式・選項 請洽業務人員 視線計測外掛程式・選項 請洽業務人員 物件檢出外掛程式・選項 請洽業務人員 4D模擬編輯外掛程式・選項 請洽業務人員 地震模擬器外掛程式・選項 NEW! 請洽業務人員
相關產品
-
相關產品
-
相關產品 價格 VR-Cloud® Ver.6Flash Version 請洽業務人員 VR-Drive Ver.2 請洽業務人員 UC-win/Road SDK Ver.14 請洽業務人員 UC-win/Road Education Version 請洽業務人員 UC-win/Road Web Viewer 請洽業務人員 UC-win/Road數據轉換工具 請洽業務人員 UC-win/Road數據轉換工具 for APS-Win 請洽業務人員 City Design Tool(UC-win/Road 3ds Max Plugin) 免費 UC-win/Road Trial Version 免費 UC-win/Road Video tutorial (日語、英語、韓語、中文) 請洽業務人員
UC-win/Road駕駛模擬器
-
UC-win/Road駕駛模擬器 系統價格(套裝) ※ 報價僅供參考 規格 購買數量 1台 10台 20台 UC-win/Road駕駛模擬器
硬體構成
・1/4 Cabin, Full Instrumentation
・3ch. 42” PDP monitor
・5.1ch Speaker, Body Sound
・CFLS Controller
・Active Steering Wheel請洽業務人員 請洽業務人員 請洽業務人員 UC-win/Road Driving Sim 請洽業務人員 請洽業務人員 請洽業務人員 合計 請洽業務人員 /1台 請洽業務人員 /1台 請洽業務人員 /1台 可選項目 1台 1台 1台 ・導航顯示器 請洽業務人員 請洽業務人員 請洽業務人員 ・2DOF運動平台(500Kg) 請洽業務人員 - - ・3DOF運動平台(500Kg) 請洽業務人員 - - ・左方向盤・離合器踏板(獨立軟體) 請洽業務人員 請洽業務人員 請洽業務人員
UC-win/Road駕駛模擬器 租賃價格(套裝) ※ 報價僅供參考 規格 租賃期間 1天 1個月 1年 UC-win/Road駕駛模擬器
硬體組成
・1/4 Cabin, Full Instrumentation
・3ch. 42” PDP monitor
・5.1ch Speaker, Body Sound
・CFLS Controller
・Active Steering Wheel
UC-win/Road Driving Sim基本價格
請洽業務人員
新增(1日)
請洽業務人員
基本價格
請洽業務人員
新增(1個月)
請洽業務人員基本價格
請洽業務人員
新增(1年)
請洽業務人員
UC-win/Road演示模擬器
演示模擬器硬體
UC-win/Road Advanced基本價格
請洽業務人員
新增(1日)
請洽業務人員基本價格
請洽業務人員基本價格
請洽業務人員安裝費/搬運費 運輸/移動前後1日免費、其他按租賃收費。
包裝、運送、搬運費按照實際費用收取。
安裝費(派遣1名技術員的住宿旅費)
UC-win/Road體驗模擬器(6軸運動平台) 租賃價格(套裝) ※ 報價僅供參考 規格 租賃期間 1天 1個月 1年 UC-win/Road體験模擬器
硬體構成
・蛋形駕駛艙, 2C塗裝 ・6DOF運動平台
・3ch. 32” LCD monitor
・5.1ch Speaker, Body Sound
・力回饋方向盤
・加速/煞車踏板系統
・方向指示器、變速裝置選項
UC-win/Road Driving Sim + 運動平台選項基本價格
請洽業務人員
新增(1天)
請洽業務人員基本價格
請洽業務人員
新增(1個月)
請洽業務人員基本價格
請洽業務人員
新增(1年)
請洽業務人員安裝費/運輸費 運輸/移動前後1日免費、其他按租賃收費。
包裝、運送、搬運費按照實際費用收取。
安裝費(派遣1名技術員的住宿旅費)
UC-win/Road簡易模擬器 租賃價格(套裝) ※ 報價僅供參考 規格 租賃期間 1天 1個月 1年 UC-win/Road簡易模擬器(一般)
硬體構成
・1台電腦(支援3螢幕輸出) ・17”LCD monitor 3台
・遊戲用方向控制器 ・遊戲座椅
UC-win/Road Driving Sim基本價格
請洽業務人員
新增(1日)
請洽業務人員基本價格
請洽業務人員基本價格
請洽業務人員UC-win/Road簡易模擬器(教育版)
硬體構成
・1台電腦(支援3螢幕輸出) ・17”LCD monitor 3台
・遊戲用方向控制器 ・遊戲座椅
UC-win/Road Driving Sim基本價格
請洽業務人員
新增(1天)
請洽業務人員基本價格
請洽業務人員基本價格
請洽業務人員UC-win/Road簡易模擬器(教學版)
硬體構成
・1台螢幕(支援3螢幕輸出) ・17”LCD monitor 3台
・遊戲用方向控制器 ・遊戲座椅
UC-win/Road Education Version基本價格
請洽業務人員
新增(1天)
請洽業務人員基本價格
請洽業務人員基本價格
請洽業務人員安裝費/運輸費 運輸/移動前後1日免費、其他按租賃收費。
包裝、運送、搬運費按照實際費用收取。
安裝費(派遣1名技術員的住宿旅費)
視線追蹤儀租賃價格 ※ 報價僅供參考 規格 租賃期間 1天 1個月 1年 視線追蹤儀 EMR-9
硬體構成
・EMR-9(帽型雙目標準套60Hz檢測・視野鏡頭44°)
・新增視野鏡頭(92°) ・帽子LL規格
・電池2個 ・電池充電器
・EMR-dFactory(解析軟體) ・腰包
・彩色液晶取景器
・串列轉換線
・分析軟體專用電腦(軟體裝載完成)
・快門開關基本價格
請洽業務人員
新增(1日)
請洽業務人員
DS同時使用時
基本價格
請洽業務人員
新增(1天)
請洽業務人員基本價格
請洽業務人員
新增(1個月)
請洽業務人員
DS同時使用時
基本價格
請洽業務人員
新增(1個月)
請洽業務人員基本價格
請洽業務人員
新增(1年)
請洽業務人員
DS同時使用時
基本價格
請洽業務人員
選項新增(1年)
請洽業務人員安裝費/運輸費 運輸/移動前後1日免費,其他租賃收費。
包裝、運送、搬運費按照實際費用收取。
安裝費(派遣1名技術員的住宿旅費)
UC-win/Road駕駛模擬器一覽 ※ 報價僅供參考 駕駛模擬器 硬體價格 詳細資訊 
緊湊型研究用模擬器
(2010年)請洽業務人員
(3ch標準)- 研究用模擬器(包含UC-win/Road DSop.)
- 全部件,計錶盤採用實車部件
- 左右方向盤、自動檔標準(手動Op.)
- ActiveSteering標準、MP(1-6軸)選項

Driving模擬器
(2013年)請洽業務人員
(3ch 標準)- 3ch. 32” LCD monitor(包含UC-win/Road DSop.)
- 6DOF 運動平台(有效負載350kg)
- 5.1ch Speaker, Body Sound
- 力回饋方向盤(SENSO-Wheel)
- 加速煞車踏板系統
- 方向指示器、目標外掛程式

緊湊型駕駛模擬器
(2014年)請洽業務人員
(3ch 標準)- 轉向系統,踏板(油門、煞車)
使用實車部件 - 對應左右方向盤、自動檔標準(手動Op.)
- Active Steering標準
- LCD儀錶盤Op

高齡者駕駛簡易模擬器
(2014年)請洽業務人員
(1ch 標準)- 21.5” LCD monitor
- Kinect™感測器
- 實車部件(轉向燈・雨刷)
- 實車方向盤
- 危險提示開關

SimCraft模擬器
(2014年)請洽業務人員
(3ch 標準)- 3ch.40” LCD monitor
- 3軸運動平台
- 高級別遊戲方向盤
- 方向盤・煞車(附帶負載調整功能)
※運動平台構成、對應Option


Flight模擬器(左)、Racing模擬器(右)
BlueTiger (2014年)請洽業務人員
(3ch 標準)- 3ch. 32” LCD monitor
- 2軸運動平台
- 飛行模擬器用介面
- 座椅振動器
(不包含UC-win/Road)
運動平台選項、
連接開發及設置調整費另計
可對應Drive類型

Demo 模擬器(2007年)
請洽業務人員
(1ch 標準)- 小型演示用模擬器不包含UC-win/Road)
- 展示、介紹用緊湊型、Start/Stop按鍵
- 安裝方向盤,加速及煞車
VR-Cloud®雲端伺服器構建/租賃價格
-
VR-Cloud®雲端伺服器構建/租賃價格
-
■伺服器構建例 (UC-win/Road每個資料) ※ 報價僅供參考
構成 UC-win/Road
Ultimate構成UC-win/Road
Advanced構成UC-win/Road
Standard構成VR-Cloud® Flash Version 請洽業務人員 請洽業務人員 請洽業務人員 VR-Cloud® Standard 請洽業務人員 請洽業務人員 請洽業務人員 VR-Cloud® Collaboration 請洽業務人員 請洽業務人員 請洽業務人員
■規格
版本名稱 規 格 價 格 系 統 備 註 UC-win/Road
主體及
VR-Cloud®1)VR-Cloud® 主體(每個服務設備) UC-win/Road Ultimate構成、
UC-win/Road Advanced構成、
UC-win/Road Standard構成伺服器構建例
參照2)Road資料(原始資料處理) 原則上,不需要資料處理/調整 原則上不需要 3)主體和數據啟動 如果有多個資料,則必須設置時間表、
任務等。原則上總是運行
伺服器租賃費
4)伺服器租賃費
基本費用:
UC-win/RoadVR數據1、
設置同時存取5個用戶端對應各種伺服器
1.利用FORUM8伺服器
2.利用資料中心伺服器
對應各種回線
100MB~1GB、盡可能用專用線路基本伺服器
租賃價格表
參照版本名稱 規 格 價 格 設置內容 備 註 VR-Cloud®
伺服器・HP
設定費用1)IIS設置、伺服器ー資料夾構建 不包含Web伺服器運用/管理費。 請洽業務人員 2)VR-Cloud®設置、資料複製、動作確認 3)VR-Cloud®用HP製作 頁面、功能表製作和連結設置等 另行估價 ※ 詳情請向業務窗口諮詢。
※ 每個伺服器(1CPU)1資料的設置費用。最多可設置的同時使用人數為99(CAL=99客戶機) 。
※ 關於系統結構,根據本公司選定的硬體規格、軟體進行。
※ 包含標準的系統設置和初期導入服務,但不包含運行管理費用。
■基本伺服器租賃價格 (UC-win/Road每個資料)/租賃係數:
租賃係數 基本租賃定價 2周 1個月 2個月 3個月 6個月 1年 1年以上
每個月標準5client ※1 0.50 0.65 0.85 1.00 1.70 3.00 0.2 新增5client ※2
租賃價格 基本租賃定價
(3個月)2周 1個月 2個月 3個月 6個月 1年 1年以上
每個月VR-Cloud® Flash Version / Standard 標準5client ※1 OPEN OPEN OPEN OPEN OPEN OPEN OPEN 新增5client ※2 OPEN OPEN OPEN OPEN OPEN OPEN OPEN VR-Cloud® Collaboration 標準5client ※1 OPEN OPEN OPEN OPEN OPEN OPEN OPEN 新增5client ※2 OPEN OPEN OPEN OPEN OPEN OPEN OPEN ※1 包含伺服器設置費。不包括資料調整。 ※2 每增加5個客戶收費。
■參考 : 我司提供環境 (雲伺服器/回線)
環 境 名 稱 ( 參 考 ) 伺服器主體 Dell公司lPrecisionR5400 四核Intel®Xeon®處理器
E5450(2x6MBL2緩存、 3.00GHz,1333MHzFSB) x 2台
8GB(2GBx4)四通道DDR2-SDRAM記憶體(667MHz、ECC)
1TBSATA3.0Gb/sNCQHDD(7200轉) x 2 SATARAIDLevel1(HDDx2)構成
NVIDIA®Quadro®FX5800、4GBDDR3記憶體OS Microsoft® Windows®7Professional64位普通版(日語/英語版)
Windows Server(TM) 2003 SP1 Standard Edition提供者合同,功能變數名稱 獲取固定的IP位址 伺服器ー維修系統 24小時技術電話支援(帶有電子郵件支援)(24小時365天),5年的當日線上維護服務 網路 USEN BROAD GATE02 光商務存取 千兆IP8、1Gbps
教育版價格
提供教職、研究人員和學生等教育相關用戶更加優惠的教育版價格。
-
教育版價格
-
產品名稱 教育版價格 UC-win/Road Ver.17 Ultimate 請洽業務人員 UC-win/Road Ver.17 Ultimate 5個授權套裝 請洽業務人員 UC-win/Road Ver.17 Driving Sim 請洽業務人員 UC-win/Road Ver.17 Driving Sim 5個授權套裝 請洽業務人員 UC-win/Road Ver.17 Advanced 請洽業務人員 UC-win/Road Ver.17 Advanced 5個授權套裝 請洽業務人員 UC-win/Road Ver.17 Standard 請洽業務人員 UC-win/Road Ver.17 Standard 5個授權套裝 請洽業務人員 UC-win/Road Ver.17 CIM Lite 請洽業務人員 UC-win/Road Ver.17 Multi User Client Version 請洽業務人員 UC-win/Road Ver.17 Presentation Version 請洽業務人員 UC-win/Road Ver.17 Cluster Client Version 請洽業務人員 版本開發履歷
-
版本開發履歷
-
UC-win/Road Ver.16 版本 發佈日期 主要升級內容 16.0.0 22/06/03 - 擴展文件CityGML對應
- OpenDrive加載功能對應
- 多使用者場景功能
- 道路横斷面CSV輸入/輸出功能對應
- 無人機插件:緊急停止按鈕
操作環境
-
製品動作システム
-
- 如欲啟用駕駛模擬,建議加裝含方向盤、煞車、油門的模擬器組(另售)。有關UC-win/Road 駕駛模擬器,請參考以下網頁資訊。
https://www.forum8.co.jp/traditional/uc-win/road-drive-cht.htm - 如欲從RoadDB下載範例檔案、範例模型等,則須在網路環境下進行。
- 如欲使用多個螢幕時,請謹慎確認顯示卡的可輸出端數量。假如有多螢幕的系統需求,則請為該電腦加裝顯示卡。
- 請於購買前確認您的電腦是否符合試用版或系統規格之最低需求。必須在符合建議規格的系統上運行本軟體。
- 請依預設設定畫面設計、字體大小。此外,建議使用20吋以上螢幕。
データ作成用 推奨システム要件 OS Windows 8.1 /10 (64ビット) CPU インテル® Core i7 4コア以上、 3.2GHz以上 メモリ 8GB 以上のRAM ハードドライブ SSDドライブ
最低60GBの空き容量(サンプルや地形データを含むVR-Design Studioをインストールするには少なくとも30GB以上の空き容量が必要)、そして、景観モデル、Roadデータベースからダウンロードしたモデル、テクスチャやAVIファイルなどの追加データを保存するのに十分なスペースが必要。ビデオカード NVIDIA GeForce 950 シリーズ GTX以上 4GB以上のメモリ
UC-win/Road Video Card情報テーブル参照ディスプレイ 1920x1080以上
画面デザイン、フォントサイズについては、WindowsデフォルトのAeroテーマが有効になっている
デフォルト設定のみ。オプションドライブ DVDドライブ サウンドカード 任意
ドライブシミュレーション用 推奨システム要件 OS Windows 8.1 /10 (64ビット) CPU インテル® Core i7 4コア以上、 3.5GHz以上 メモリ 8GB 以上のRAM ハードドライブ SSDドライブ
最低20GBの空き容量(サンプルや地形データを含むUC-win/Roadをインストールするには少なくとも10GB以上の空き容量が必要)、そして、景観モデル、Roadデータベースからダウンロードしたモデル、テクスチャやAVIファイルなどの追加データを保存するのに十分なスペースが必要。ビデオカード NVIDIA GeForce 1070 シリーズ GTX以上 8GB以上のメモリ
UC-win/Road Video Card情報テーブル参照ディスプレイ 1920x1080以上
画面デザイン、フォントサイズについては、WindowsデフォルトのAeroテーマが有効になっている
デフォルト設定のみ。オプションドライブ DVDドライブ サウンドカード 任意
注意
- 如欲啟用駕駛模擬,建議加裝含方向盤、煞車、油門的模擬器組(另售)。有關UC-win/Road 駕駛模擬器,請參考以下網頁資訊。
產品購買/諮詢窗口
-
產品購買/諮詢窗口
-
■ 諮詢窗口
FORUM8世界各地營業據點皆接受諮詢。>> 業務窗口
如果您對購買或網站有任何疑問,敬請洽詢。
台灣富朗巴軟體科技有限公司
電話:02-26558375 E-mail:info-taiwan@forum8.com
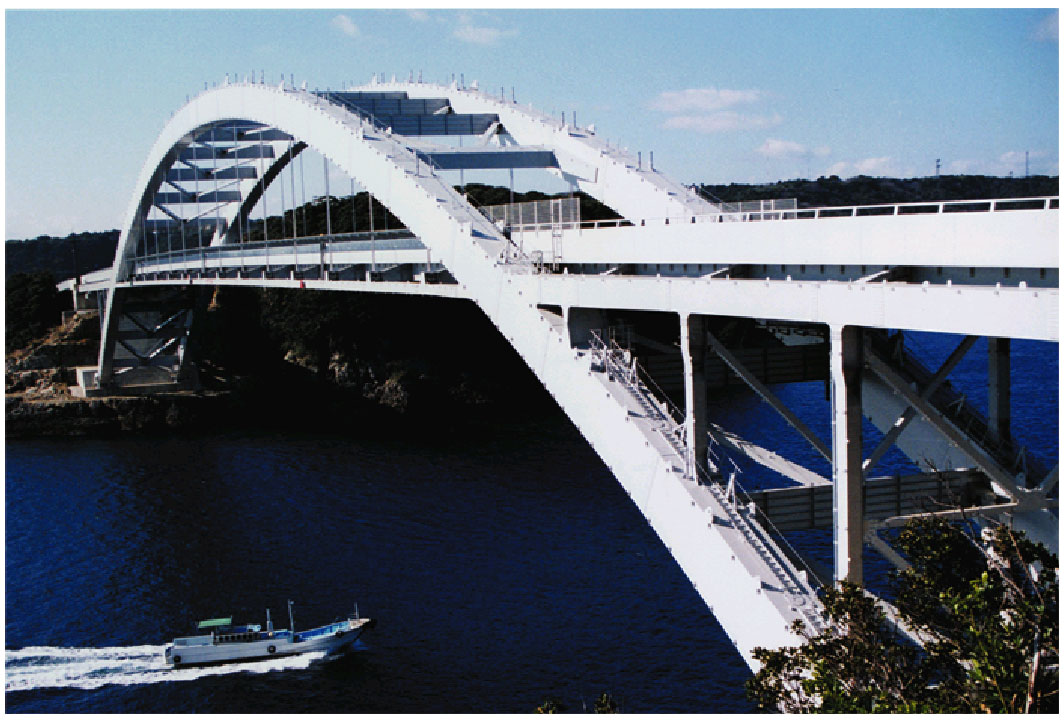
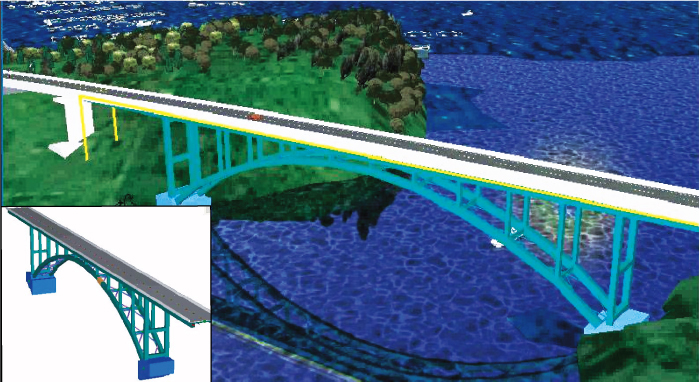
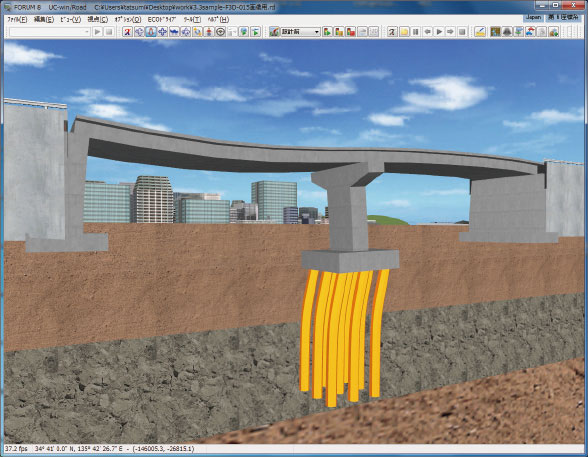
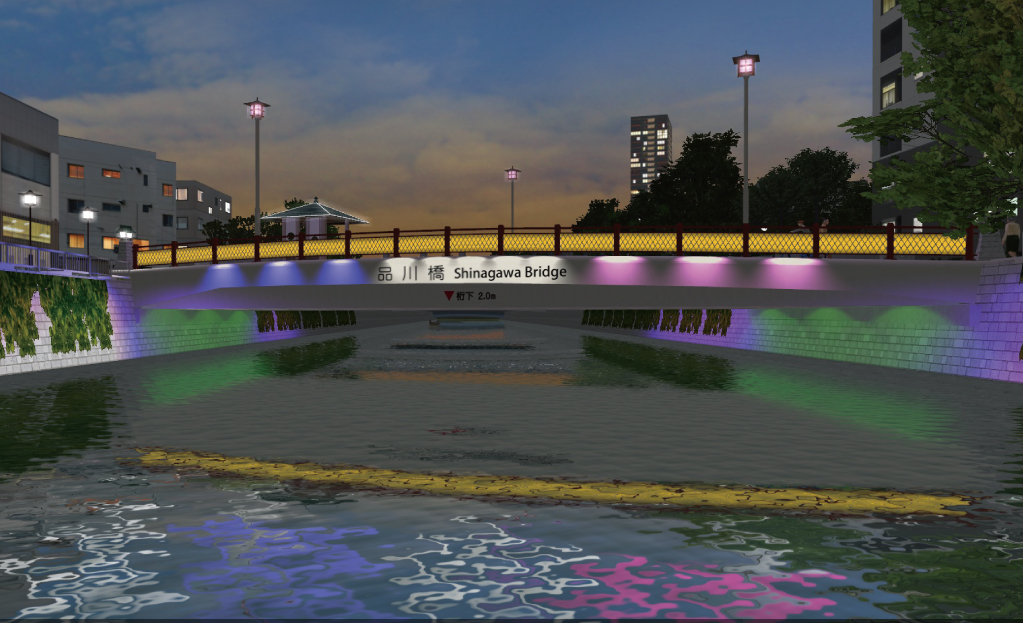
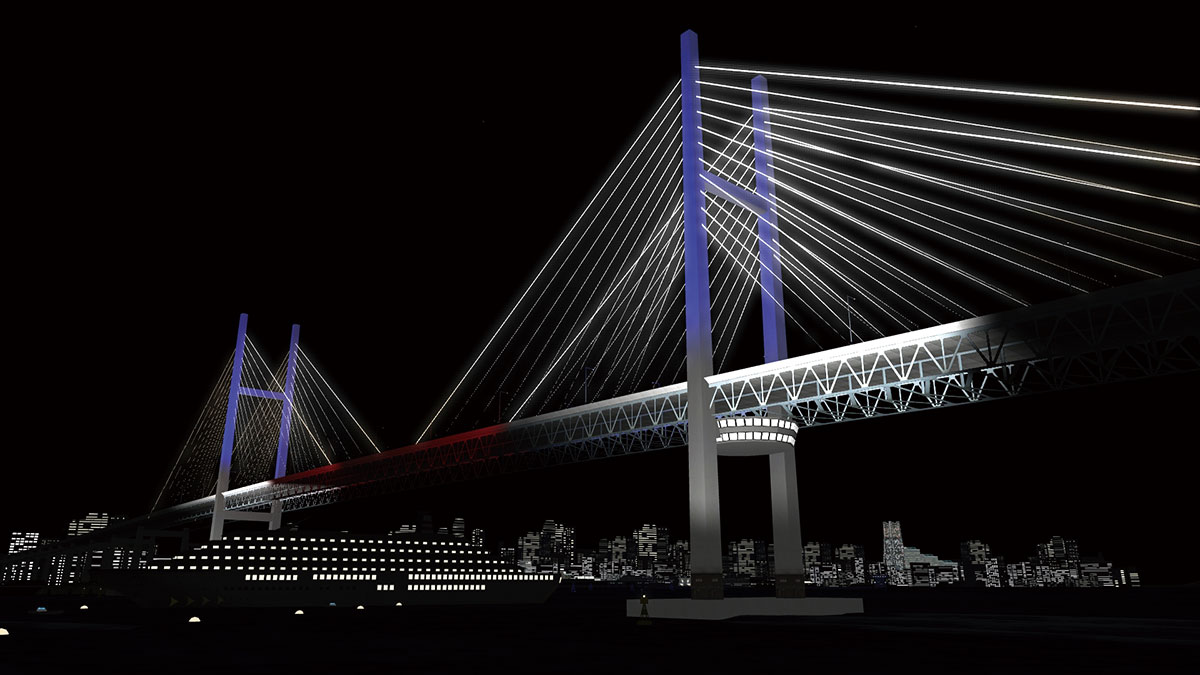
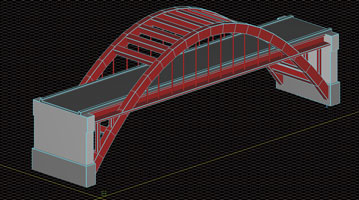
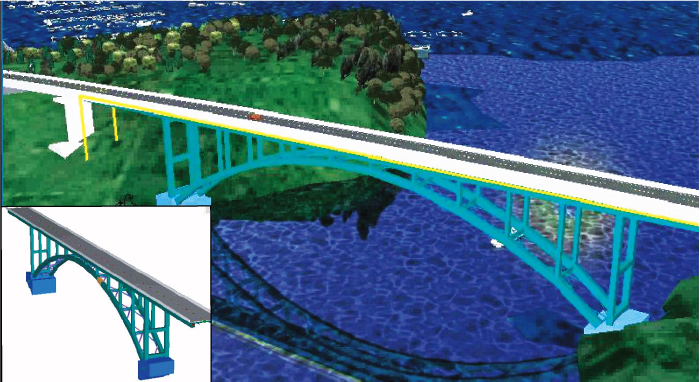
-橋樑/隧道-
橋樑形式的選擇上也體現了動態3DVR的效果。橋樑模型可從FORUM8公司的[RC下部工的設計計算]、UC-1設計系列、[UC-win/FRAME (3D)[Engineer's Studio®]等設計資料中直接以3DS形式匯出。可應用於橋樑形式、橋樑色彩,此外,也可用於結構物的日照陰影的檢討,可根據季節時間變化即時觀測陰影的效果。配合行駛、步行、飛行等模擬手段,在景觀檢討中有卓越的效果。

▲實景比較(左:實景拍攝,右:UC-win/Road螢幕)
日本光榮株式會社K本大橋向Naega Loop Bridge提供的資料
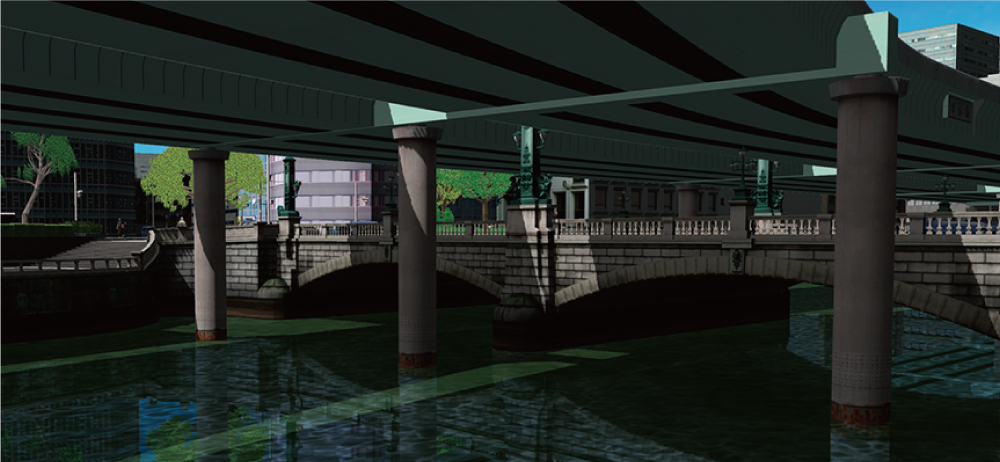
▲高速公路高架橋去除前後對比 前(左)/後(右)(日本橋河)
▲高精度渲染實現精細的陰影效果

▲顯示橋樑的照明

▲在瀨戶大橋上開車時的風景
▲Engineer's Studio® 3DS導入

▲隧道內部

▲隧道井口設計

▲VR向隧道管理人員
培訓系統(BMIA(法國))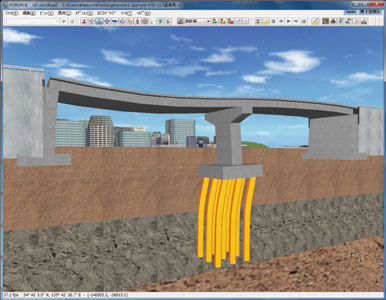
▲透過Engineer's Studio®匯出
3D模型
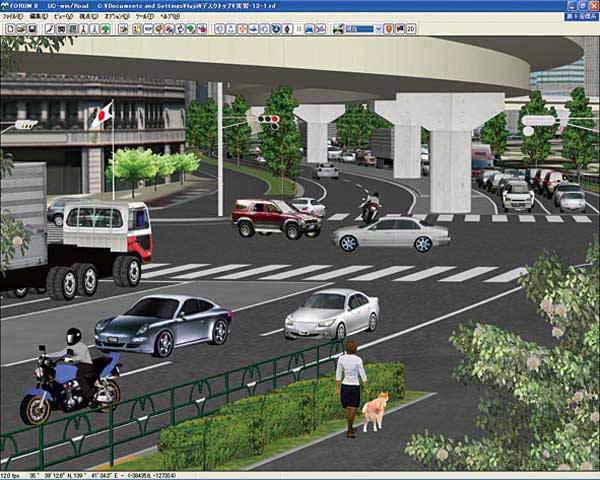
-交通-
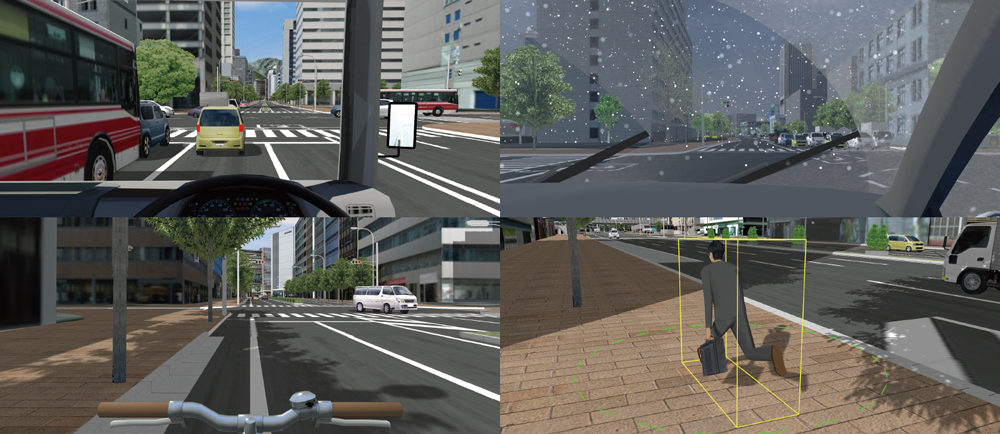
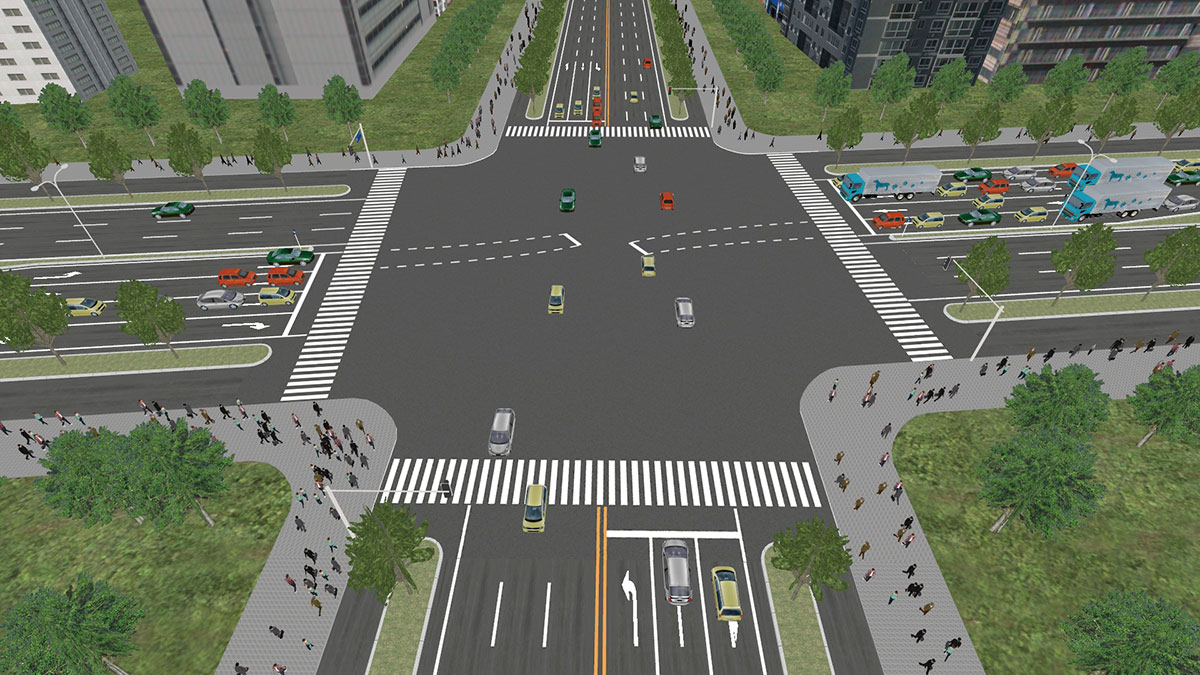
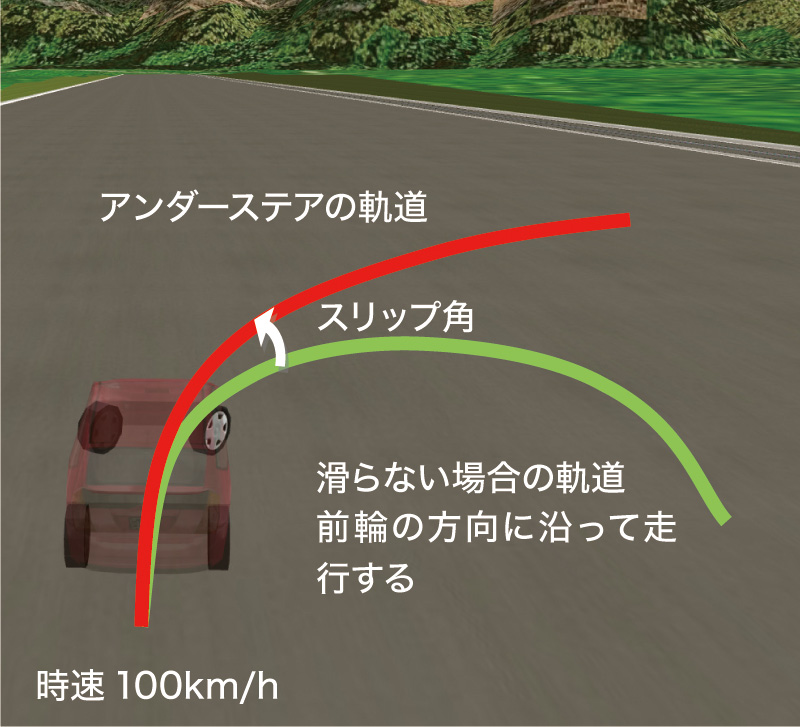
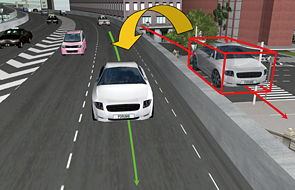
支援基於交通量和車輛設定檔的交通模擬。可以對應車輛性能和垂直坡度進行模擬。可以施行繞行模擬和大規模車流量模擬。透過與各種流量分析軟體連結,可以有效地使用流量模型數據。

▲第十二屆3D VR模擬大賽大獎賽
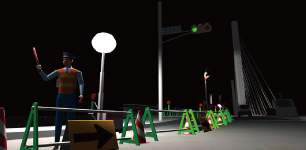
夜間施工中的VR交通管制模擬”岩崎株式會社企劃研究部
使用UC-win / Road,您可以輕鬆地研究景觀,道路設計和交通狀況,還可以透過駕駛模擬從駕駛員的角度檢查道路狀況。


能夠播放由移動3D模型代表的各種類型的模擬動畫。 透過UC-win/Road和其他交通比較,可以記錄和釋放交通流。
●OSCADY PRO外掛程式 交通訊號燈設計軟體
可以執行交通號誌自動設置和安排,並且可以逐步且快速地最佳化號誌容量、交通擁堵和交通號誌。

●SIDRA外掛程式 VR模型自動生成工具
使用十字路口設計軟體SIDRA和UC-win/Road設計的用於十字路口的VR表示外掛程式。

●VISSIM外掛程式
可以讀取VISSIM的交通流分析結果並進行模擬。

在UC-win/Road的3D空間中複製了Aimsun的車輛行為和號誌顯示的交通模擬。

●交通模擬・Clearing House
(社)交通工學研究會
刊載了UC-win/Road的檢證項目
http://www.forum8.co.jp/topic/up68-p4.htm
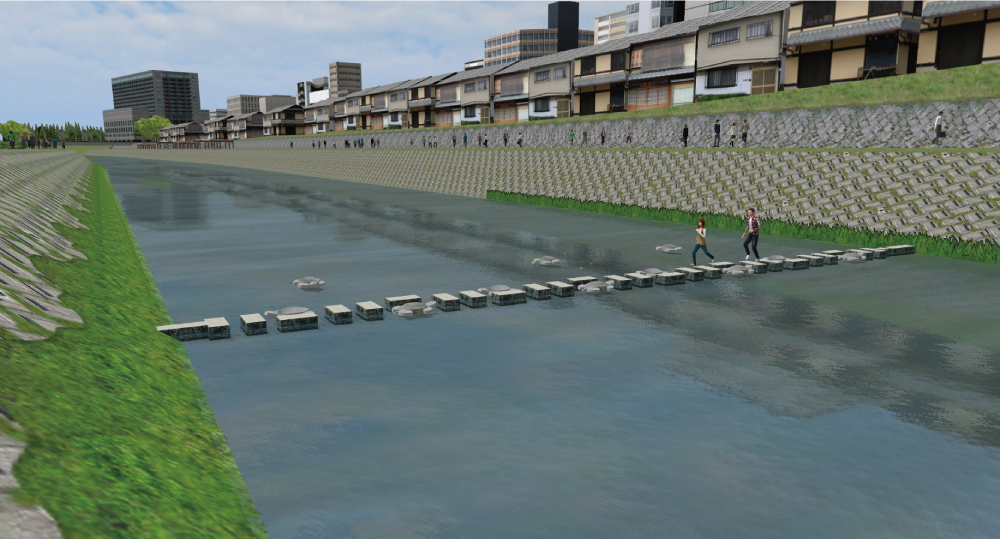
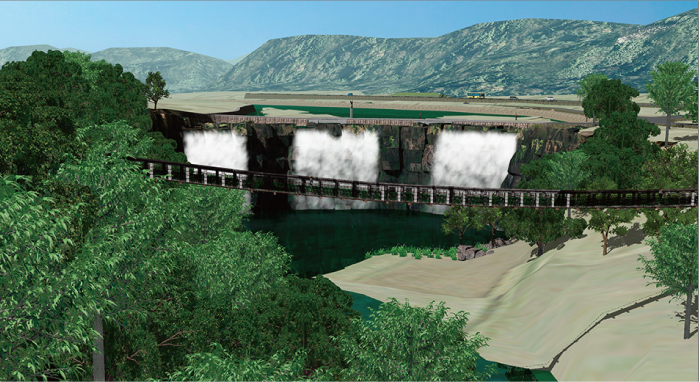
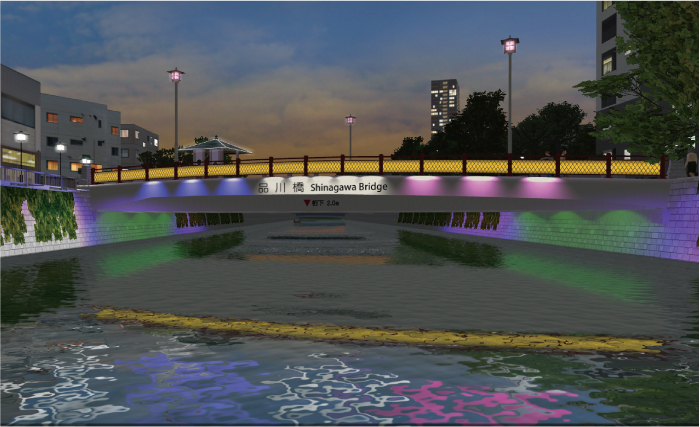
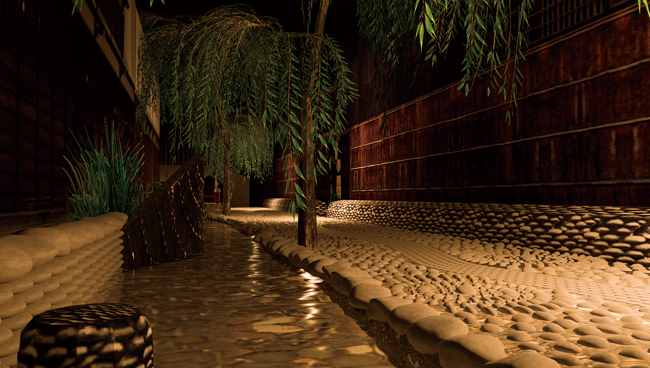
-河川-
可應用於河道改良、治理規劃等方面,利用河川指令還可定義流動效果。
▲第13屆3D VR模擬競賽優秀獎
京都市伏見技術高中的“ Higashitakase河周圍環境改善模擬”
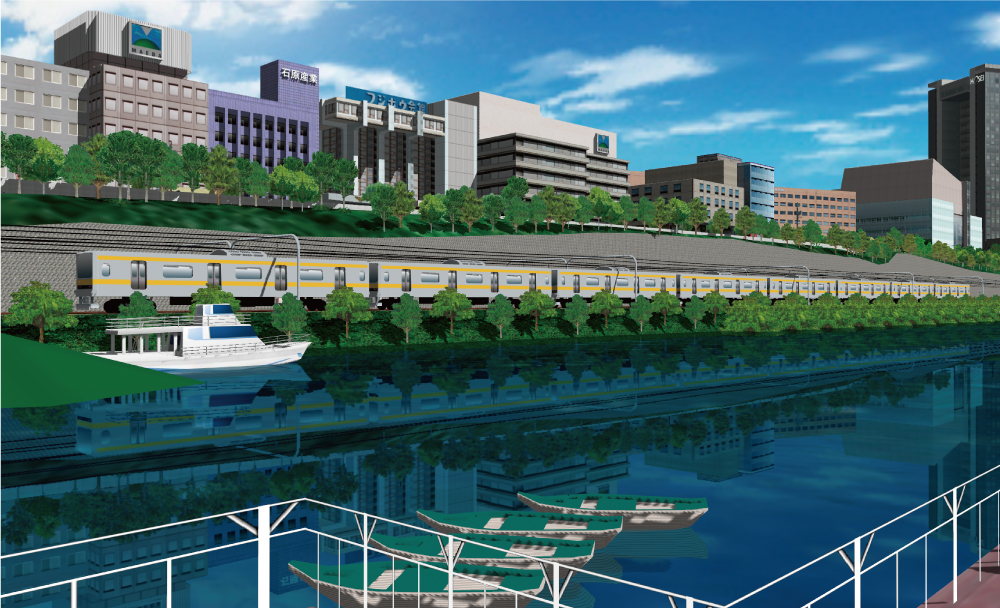
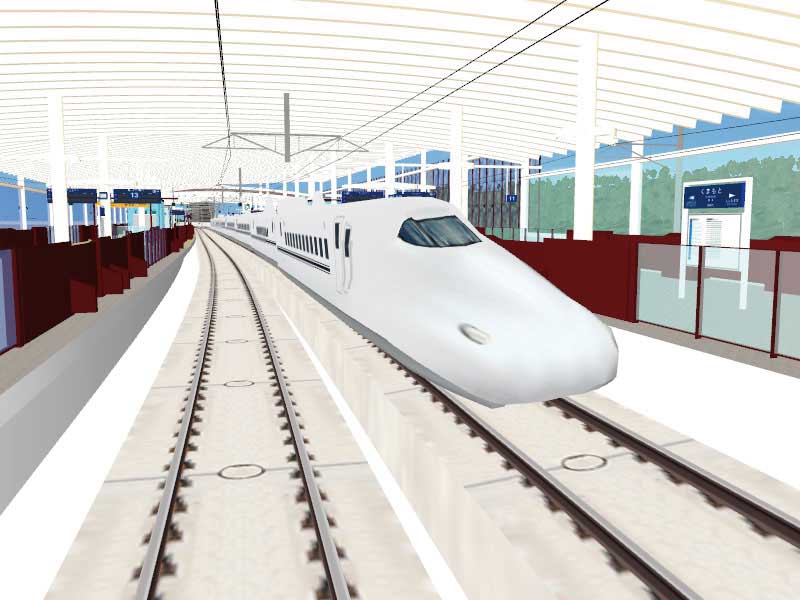
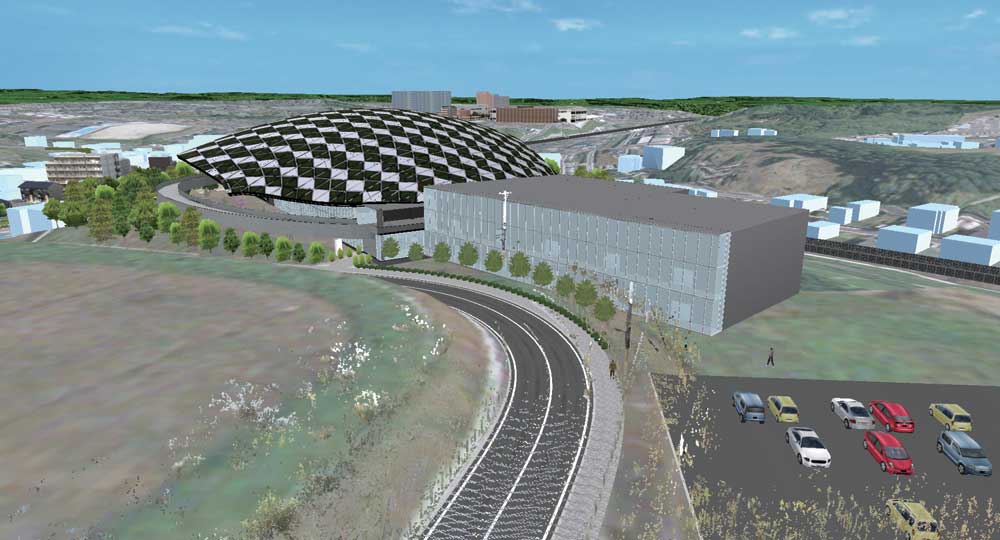
-鐵道-
在鐵道及軌道等新型交通系統方面,同樣可利用道路模擬的方法實現。立體交差、下穿式立體交流道、橋上化等方案比較均可簡單作成、車站周邊的客製化開發、車展附屬工程的規劃等,均可運用到3D虛擬實境。
我們還提供各種系統結構,例如用於研發,教育和培訓以及公共關係展覽的火車運行模擬器。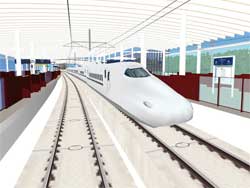
▲第10屆3DVR模擬競賽
大獎“操作設備安裝位置檢查系統”
製作人:鐵路建設運輸設施發展支援組織
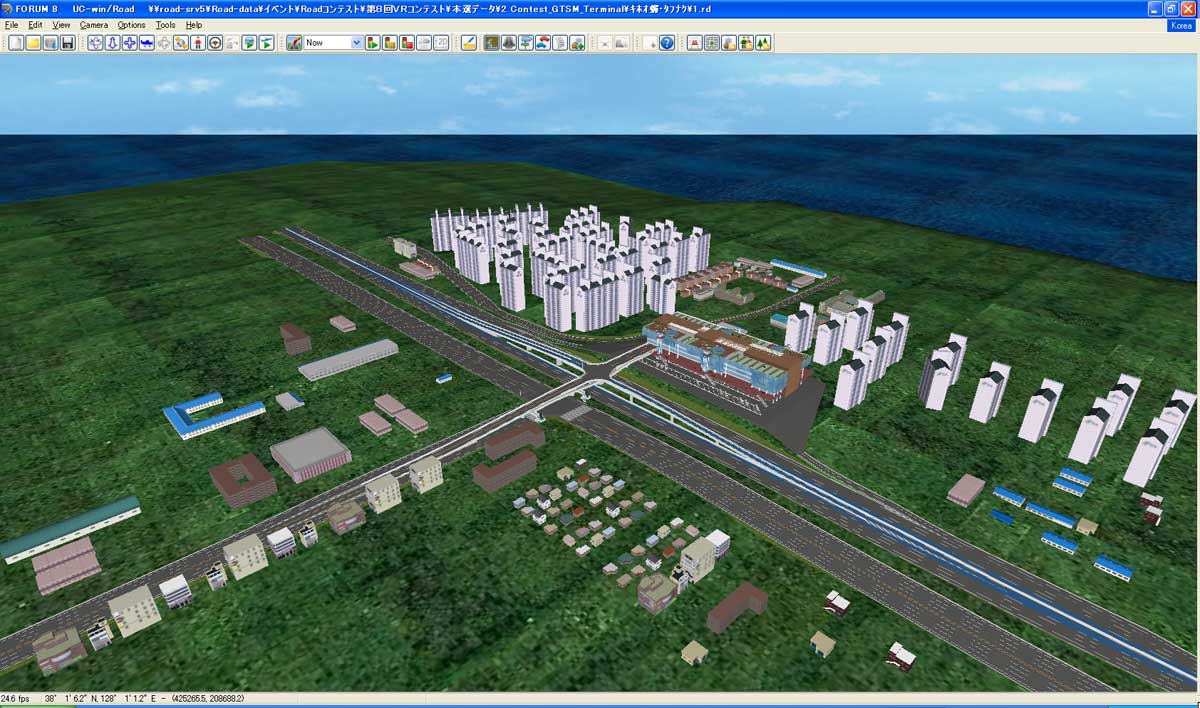
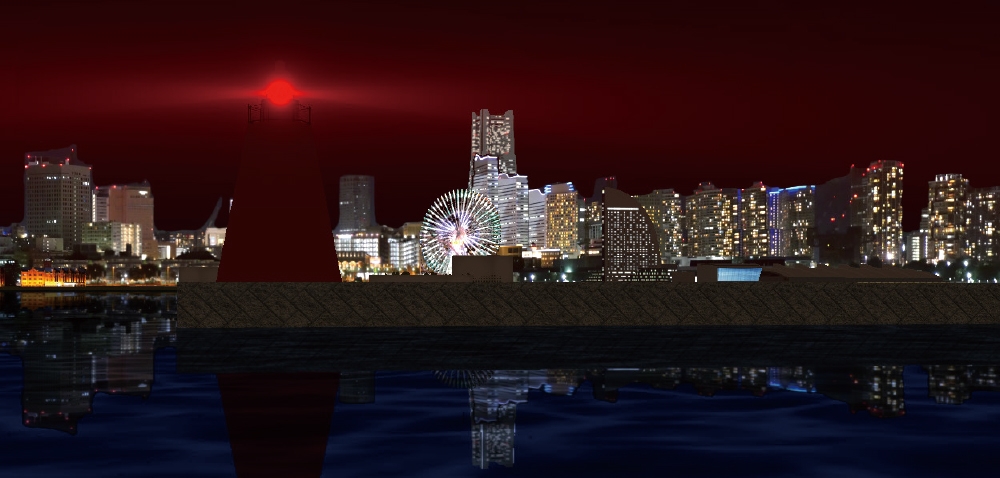
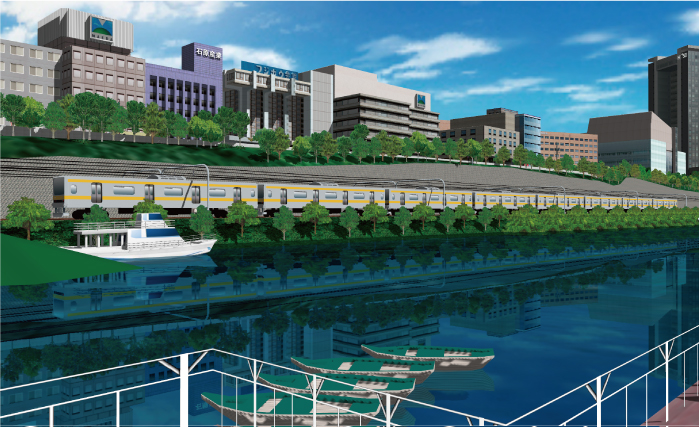
-港灣/機場-
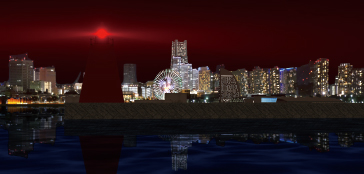
港灣、機場的模型可利用航空圖片進行廣域範圍的模擬。透過飛行路徑的設定,可呈現船舶等航路的航行狀況。可透過設定飛行模型來表現飛機的起飛和著陸。海岸、海中的模型可透過倒影效果表現 ,同時提供下載素材豐富的資料庫。

▲橫濱港樣品模型

▲神戶港樣品模型

▲按飛行路線定義飛機起降
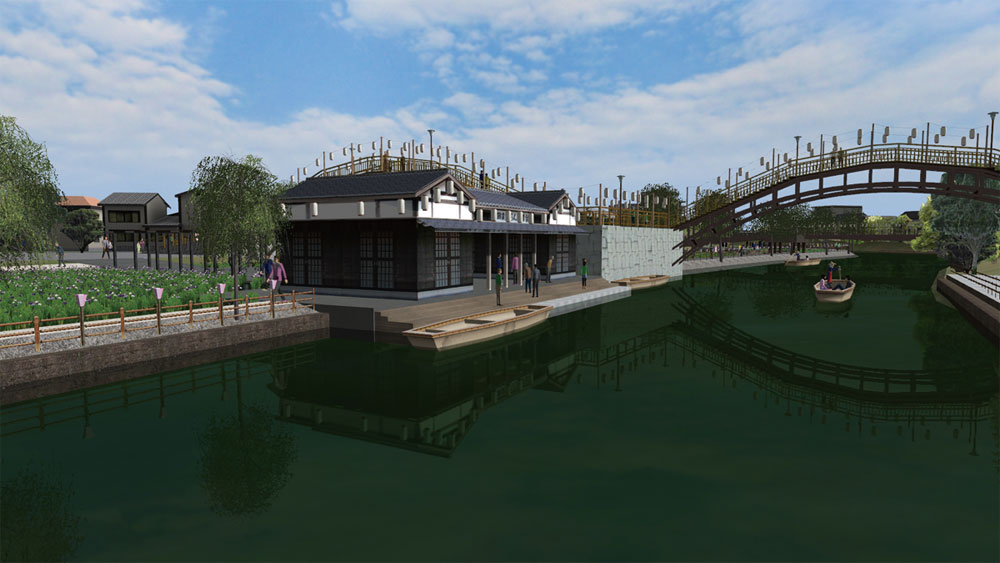
▲水鄉和水路的範例(郡上八幡)
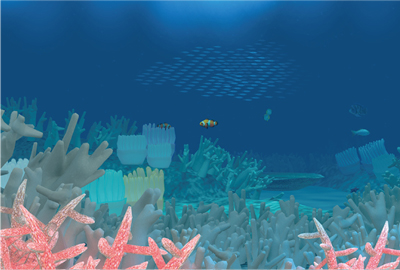
▲海中圖像模型
珊瑚礁= 3D樹·魚= MD3角色
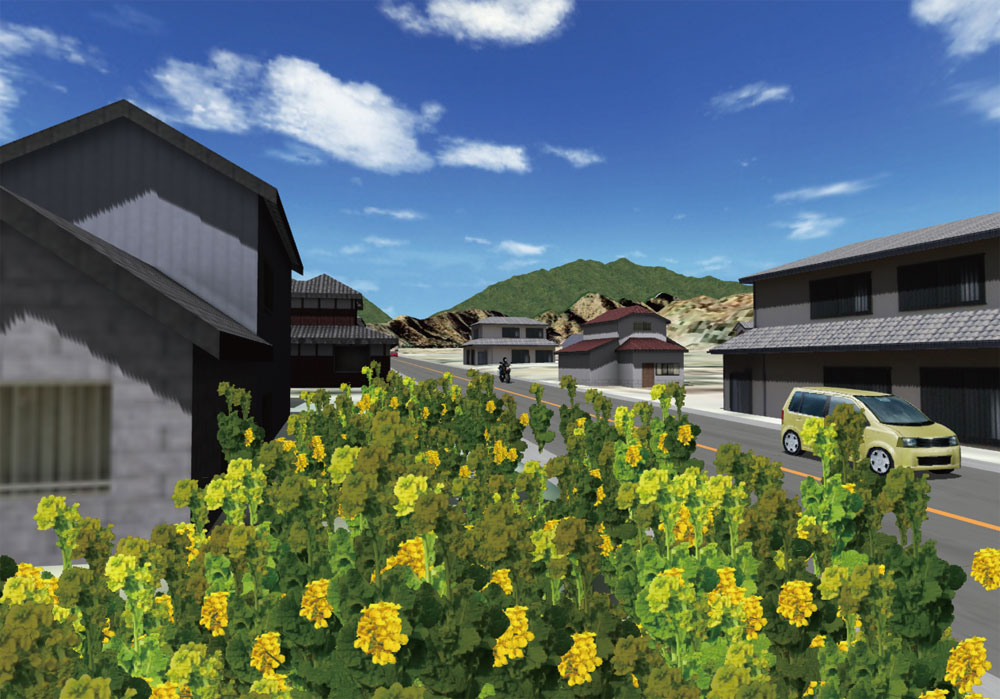
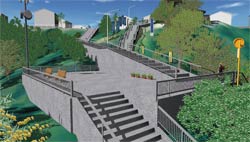
-公園/住宅區-
在設計公園或住宅區時,可以在整個計畫的VR空間中瀏覽並切換計畫的顯示,從而在檢查圖像的同時研究風景等計畫。可以使用各種模擬,例如使用豐富的樹木紋理和高表現力的3D樹木進行種植研究,以及研究規劃對人流和交通的影響。
▲第10屆3DVR模擬競賽
評委特別獎 社區發展獎
“校車路線維護計畫模擬”
創作:Tatsumi設計顧問有限公司
▲第14屆3DVR模擬競賽大獎
“關於在築城城內進行城市景觀規劃的建議
確認模型”創作:大分縣杵築市
▲城市與建築博客-信濃大街
(NPO社區發展講習班)
▲第13屆3DVR模擬競賽
設計獎“N House房屋設計研究”
虛擬實境模擬 創作:工作室唐
▲第9屆3DVR模擬競賽
提名獎“BAN JAR水上樂園”
創作:FUJICON PRIANGAN PERDANA,PT(印尼)
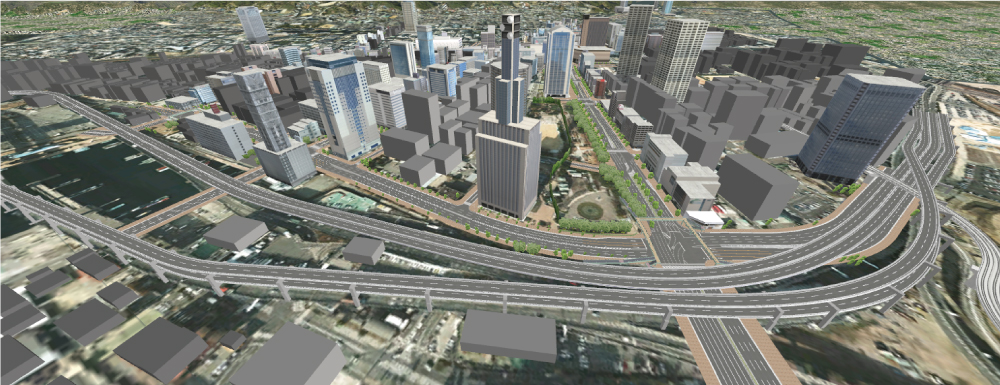
-都市/街路-
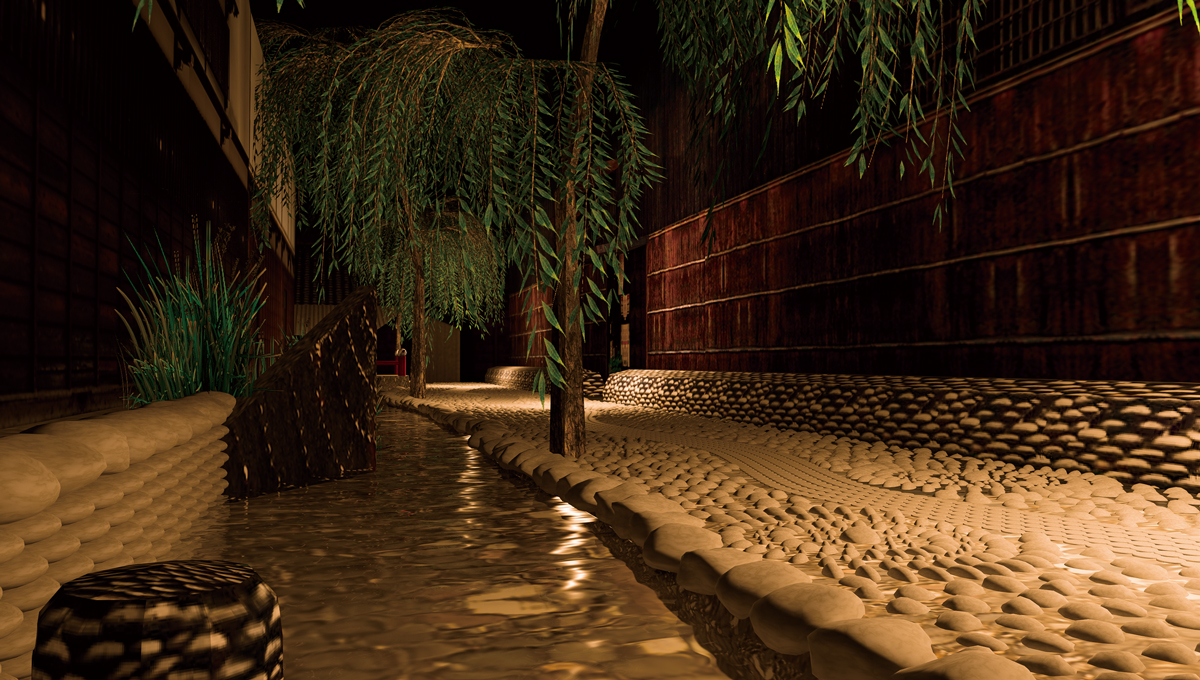
在公園和城市街道設計的領域,可用於樹木栽培的討論、樹種的比較選定,同樣可模擬春夏秋冬、5年後、10年後的樣子。街道的改良計畫、車展前的客製化開發,3D交通流、3D人物模型的利用,可綜合用於城市空間的動態表現。還對應了可實現夜間材質切換表現的人造燈光效果,透過該功能可進行白天黑夜的效果比較和評價。

▲第15屆3DVR模擬競賽
大獎
境港創造的“境港茂水木路”
▲第14屆 3DVR模擬競賽
社區發展獎“〜讓您有一天回家的城市規劃專案〜
夢想地帶!淡路市夢梅台可持續公園
-向緊湊型城市邁進-” 創作:兵庫縣淡路市政廳
▲晝夜景觀評估(晝)
▲晝夜景觀評估(夜)


▲第9屆 3DVR模擬競賽創意獎
“使用VR在設計城市神戶建立共識以實現景觀形成”
神戶市規劃局
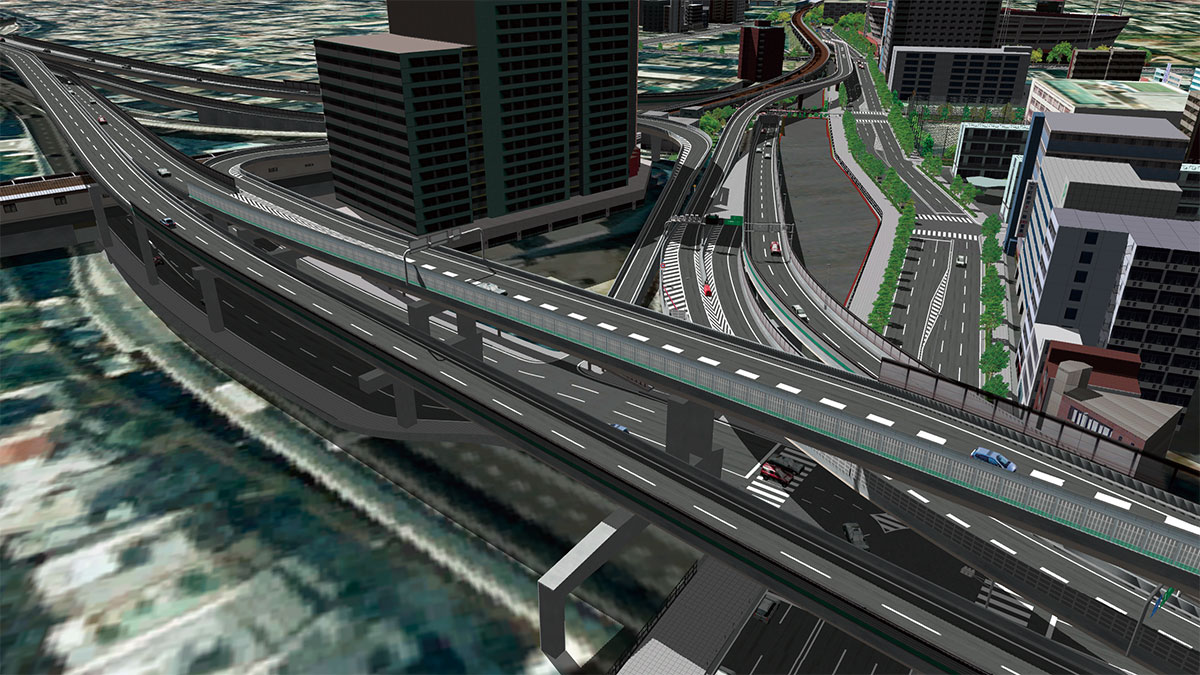
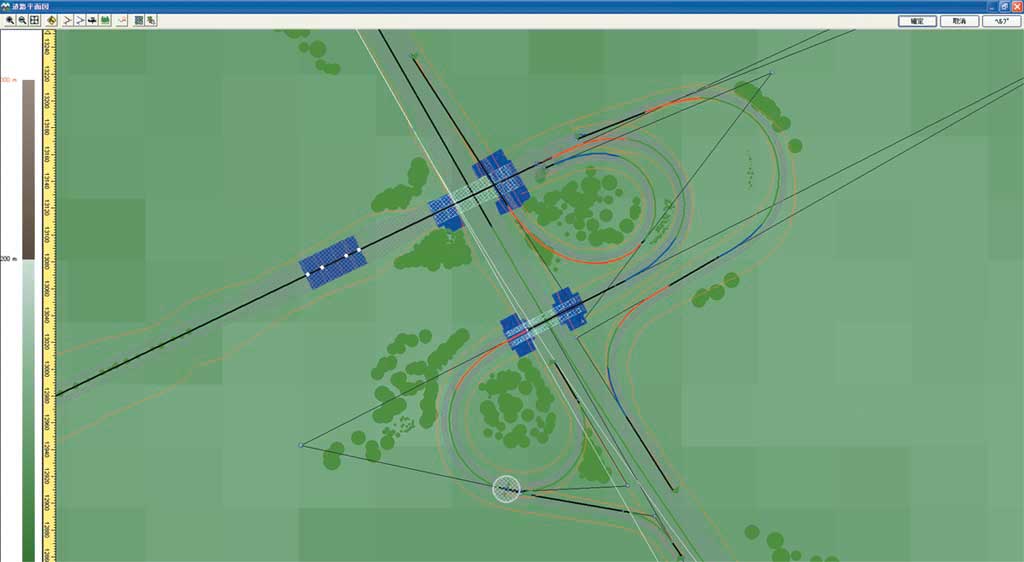
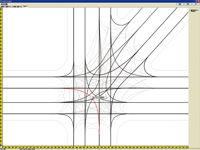
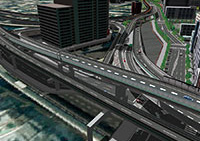
-道路模擬-
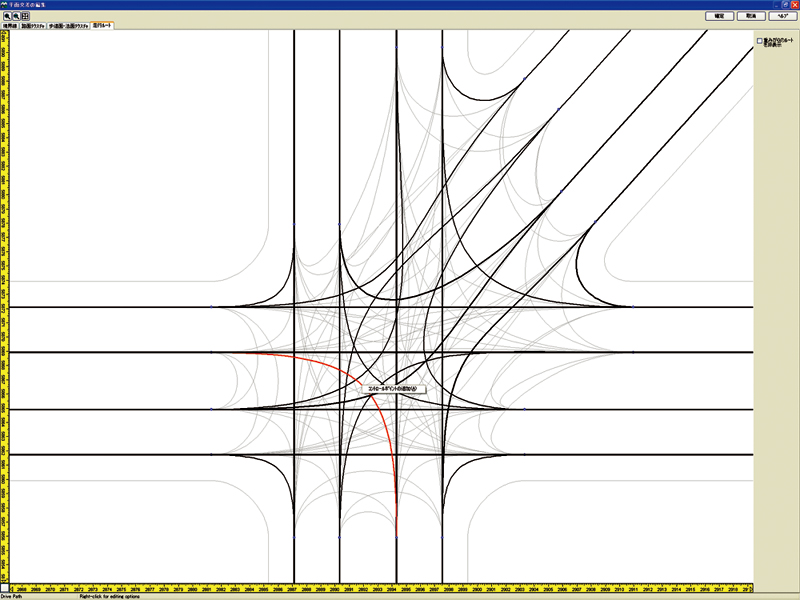
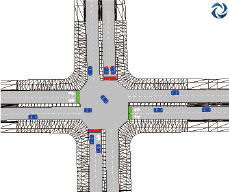
在填方挖方落石台等的邊坡評價中,可自由掌握移動速度對內部景觀、外部景觀進行模擬。豐富的道路功能,可簡單完成立體交叉、隧道、橋樑、平面交叉點的制作,並能視覺化地定義複雜交叉點的形狀、材質、行駛路徑、交通控制。透過On/Off匝道定義功能,複雜的立體交叉也可在短時間內切完成。透過時間交通量、車輛種類的分佈屬性設定,在交通堵塞模擬、高速公路規劃的交通量比較方面可廣泛應用。
▲立交(1)

▲立交(2)
▲環島(1)
▲環島(2)



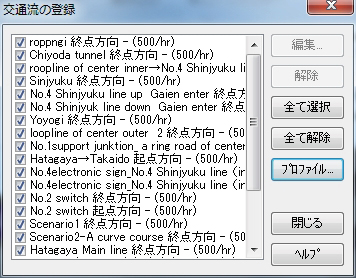
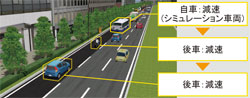
▲Traffic Generators(產生交通/交通流)
透過設置車輛類型比率和每小時交通量來實現交通產生和車輛碰撞控制的交通模擬。
從左上角起,交通路線,按每小時交通量和車輛類型的比率設置螢幕。1.動作環境
- 需要特別的電腦嗎?
-
市面上賣的電腦搭載的影像處理功能基本上可以使用,但如使用加強了影像處理功能的電腦就可以更流暢地操作3DVR。
建議規格範例:
OS Windows 7、8.1 的64bit版
CPU Intel Corei5、Corei7
必備記憶體 8GB以上
顯示卡 Open GL2.1 (建議11GB以上)
Desktop:
NVIDIA Geforce GTX 970、980
NVIDIA QUADRO K5000、K5200、K6000
Note:
NVIDIA Geforce GTX 980M
顯示器 建議解析度 1920×1080以上
如果有不清楚之處請參照以下聯繫方式進行詢問。營業窗口:+886-2-2655-8375
- 搭載Radeon顯示卡的電腦沒問題嗎?
-
只要對應OPENGL的話,基本上是沒有問題的。但是,使用NVIDIA顯示卡可進行描繪的資料,在使用Radeon顯示卡時可能無法正常描繪。
此外,發生問題的話可能無法立刻解決。因此,請盡可能使用建議的NVIDIA顯示卡。 - 可以使用HORI公司製造的方向操縱控制器EX嗎?
-
系統支援的方向操縱控制器通常採用可與電腦連接的控制器。
HORI公司製造的方向操縱控制器EX是微軟的軟體Xbox所使用的設備,該外部設備與電腦連接可用於一般的遊戲,所以屬於系統相容可以使用的範疇。但是,此設備並未經過本公司實際認證,敬請諒解。 - 電腦中如果在使用[.NET Framework 3.0],會發生什麼問題嗎?
-
經本公司確認,在安裝[.NET Framework 3.0]的電腦上,系統可正常運行,沒有問題。
-
UC-win/Road用於桌機時,建議規格是什麼?
1) OS
2) CPU(包含時脈)
3) 記憶體容量
4) 顯存容量
5) 畫面解析度
6) 硬碟容量
7) 畫面的物理大小(15英寸、17英寸等)
8) 投影外接插槽等、特殊需求的硬體
9) 其他注意事項。 -
→ 畫面越大越容易觀看。
8)投影外接插槽等、特殊需求的硬體
→ 進行駕駛等功能的時候,需要上述控制器。
9)其他注意事項。
→ 記憶體、顯示卡對操作有很大的影響,選擇配置時請注意考慮。
2.數據製作
- 新增讀取是指從別的數據中讀取其他模型資料嗎?
-
是的,輸入場景時道路也會跟其他模型一樣被讀取,請注意避免重複。
- 可以刪除景觀儲存位置嗎?
-
景觀儲存位置的編輯畫面中的有[刪除]按鈕,該按鈕如果處於無效狀態,有可能是腳本設定中使用了該景觀位置。
- 利用模型組放置電線杆時想要設置電線杆的電纜。並且想讓電纜的顏色從黑色變成銀灰色。
-
變更電線顏色時,在電纜配置完以後,滑鼠選擇點擊電線部分,從彈出的[電纜編輯]畫面點擊顏色的部分,可任意設定顏色。目前,還沒有一齊變更初始顏色設定的功能。為此,操作比較繁瑣,需要從每兩個柱子間的電線調出編輯設定畫面,逐一進行變更。
- 景觀位置中可以指定座標和高度嗎?
-
主畫面的下方狀態列中顯示了現在位置的座標。該座標是世界測地系座標。參考這個座標可對景觀位置進行儲存。但是無法指定高度。
關於座標輸入及高度設定,可利用飛行路徑進行設定。請從平面圖中定義飛行路徑,輸入起點位置座標。飛行路徑的縱斷面中設定起點高度,並在飛行路徑的起點設定動作控制點,速度為0。儲存該飛行位置。 - 可以表現照明的閃爍效果嗎?
-
可透過模型的可動設定實現。UC-win/Road起動時登錄的模型中,有一個名為Brinker的模型, 請參考此模型設定。
實現準備好粘貼了亮燈材質和滅燈材質的目標模型,載入到UC-win/Road以後,透過模型編輯的可動設定, 將他們設置在交互替換的位置,由此表現出明暗閃爍的效果。 - 路徑飛行時,預設為注視進行方向,是否可指定視線方向。
-
使用Look at Me功能,可以設定想看的方向。順序如下。
- 在想看的方向上選中某個模型編輯畫面的[控制物件]。
- 道路平面圖的飛行路徑中新增動作控制點,設定物件[模型]。
- 動作命令設定為[LOOK AT ME]。
以上完成後進行飛行,透過動作控制點後視線將向著設定的模型狀態飛行。
- 從Road向Civil3D輸出地形資料時,可輸出多大規模的地形?
此外,反之從Civil3D向Road導入地形資料時,可輸入多大規模的地形? -
從Road向Civil3D輸出地形時,原則上可輸出Road資料的整體範圍。
從Civil3D向Road導入時,最大可以載入20km x 20km的範圍,合併時受當前Road的範圍限制。 - 車輛在交叉口行駛時,會出現顛簸搖晃的現象。有沒有方法消除此現象?
-
按下交通生成按鈕,車輛在行駛到交叉口時,會根據路面的起伏変化產生相應的動作。車輛行駛在交叉口出現的顛簸搖晃現象,是對交叉道路的縱斷面坡度、橫斷面相互銜接等路面狀態的反映。
- 伴隨車道變化,斑馬線的位置發生変化時,應該如何進行設定。
-
斑馬線區間的変化,使用Transition進行設定。設定Transition時,請注意以下要點。
- 相同方向的車道間的斑馬線材質設定在[斷面詳細]的間隙位置
- 中央分割帯的斑馬線材質設定在車道和車道間的斷面
- Transition所在前後斷面的節點數(橫斷面的控制點數)需要保持一致,按照這個要求,在斑馬線消失的位置斷面中仍然要設定寬度為0的斑馬線的材質區間
- 在Transition[起點側的曲率]、[終點側的曲率]做相應設定
- 飛行路徑飛行過程中,希望調整視線為非正面的指定角度
-
[道路平面]畫面中,在飛行路徑上點擊滑鼠右鍵,選擇[新增-動作控制點]。
其次,在[編輯-動作控制點]中選擇命令[Sloly Turnhead,或Turnhead],輸入需要的角度。 - 關於從3車道向2車道,車道変更部的車輛優先性
從3車道到2車道,在車道減少的位置第1車道消失,根據第2·3車道做成2車道道路時,從第1車道行駛來的 車輛將優先于第2車道,導致第2車道的交通流下降的現象出現。對此有沒有恰當的處理方法。 -
從3車道變化到2車道,來自外側第1車道的行駛車輛進入第2車道時,可確定會受到優先待遇。
原則上,判斷第1車道的行駛車輛移動到第2車道時,第1車道的車輛變更到第2車道,當判斷不能移動時則停止在第1車道內。第1車道的車輛移動到第2車道時,在第2車道遭遇到車輛的話,第2車道的車輛主動回避衝突,直接停止,這種停止狀況如果連續發生便會造成該車道的擁堵。 - 關於各路線生成交通量向車道的分配
假設,單向2車道的道路中生成交通量為500台時,一般各車道會按250台均攤分流,如果希望按7:3的比例分流時,該如何設定? -
有以下2個方法。
- 各車道的起點側連接上匝道,對各車道分別按7:3的比例進行車輛生成。但是,為了對每個車道分別連接匝道,需要調整上匝道的位置。
- 在考慮區間的前面新增車道変更的動作控制點,或者車道的行駛車輛按7:3的比例向相鄰車道做變線設定。
這些方法中,2)有可能會在車道変更時出現擁堵。為此類似情況下建議採用1)的方法。
- 關於交通量的生成方法
以前,關於設個問題,做過基於泊松分佈的生成交通量的回答。假設,某時段按3600秒、500/hr生成的情況,具體是如何生成交通的? -
交通流的生成中使用的是泊松分佈。泊松分佈是按單位時間t內以x表示事件的發生概率。因為是概率,所以平均 值相同的情況下,一定時間內並不代表會生成完全相同的台數。因此,在畫面上會呈現某個時間段很少,某個時間段很多。
基本上車輛出現相關的階段設定,有効行相關輸入的時間間隔,是時間台數生成交通量的意思。僅輸入1行的情況下與輸入的時間無關,按照設定的交通量(台/hr)生成。此設定可進行複數行的輸入。
根據設定的位置眼前有伴隨號誌的交叉口,這麼考慮會相對容易理解。原則上此交叉口的號誌階段可以看作是這裡輸入的時間。例如,某號誌的綠燈階段為30秒、 紅燈號誌為11秒的情況,交通量500台/hr時,第1行時間->30、交通量->500、第2行 時間->11、交通量->0, 按照以上進行輸入。基本上不可能發生交通號誌燈在某階段為3600秒的情況,請理解輸入項目的內容後再進行使用。 - 巴士臨時停止後想要再次發車。
-
請按以下順序設定。
- 巴士模型可進行僅有臨時停車的可動設定。
- 將巴士新增到飛行體(行駛車輛)。
- 設定動作控制點。
第1行速度0km
第2行指定命令和再開速度
- 為了確認道路的建築限制4.5m,例如是否有從路面測量物件高度的功能等?
-
計測功能僅限模型中心間的水準距離。確認高度等時比較麻煩。
作為確認建築界限的方法,可以參考的示例如下所示。- 製作標記了刻度的規定模型,將其移動進而確認。
- 製作顯示建築界限範圍的模型,透過行駛進行確認。
- 製作顯示建築界限範圍的斷面,選擇表示非表示,根據透過等的使用需要進行確認。
請嘗試以上任一種方法。
- 製作道路斷面時,如何才能有效率地對樹木進行配置?
-
作為[道路附屬物]進行配置。但是局限於單一機械的配置,有必要進行個別配置等需要另外下功夫。
- 站前圓環的道路該如何製作。
-
首先,定義大約1周的環繞道路。縱斷線形中設定一個方向的斷面,返回道路編輯的平面畫面。
道路的兩端部會顯示黃色三角,連接上、下匝道。
由此,完成環繞道路的製作。 - 現在,使用設計前、設計後的切換按鈕,可對多個案進行切換顯示。
因為案有4個以上,想增加模版。 -
[選項]-[景觀模型表示]-[景觀新增]中包含現在、設計前、設計後,最大可增加到20個模式。
增加部分的景觀名稱可透過[名稱變更]進行切換顯示,此外,其狀態下配置的模型作為預設值,只有選中核取方塊時該模型才會在景觀中顯示。
顯示切換透過下拉式功能表進行切換以外,按下Ctrl + Shift + 數位(2位元),再鬆開Ctrl + Shift,可切換到該數位的景觀。 - FORUM8名古屋事務所的範例資料中,請教煙火的處理是如何實現的。
>> FORUM8名古屋事務所範例資料 (UC-win/Road Web Viewer) -
煙火發射過程的圖像使用的是數枚板狀物體粘貼材質後的3DS模型。透過可動設定,一次進行顯示而表現出的煙火效果。
RoadDB中登錄了一部分,請確認。
[3D模型的載入]-[下載]-可搜尋煙火。 - UC-win/Road中可進行錄影播放嗎?或者可以進行接近錄影的播放(11-30frame)嗎?
-
錄影的播放可以在腳本中進行。(如 Q2-19所示,觀賞到的煙火並非動畫而是可動模型。)
腳本的[多媒體]-[錄影播放]下 《 產品的安裝資料夾》Video中指定登錄的AVI檔案,腳本執行中根據設定的時間進行播放。 - Civil3D製作的資料希望導入到UC-win/Road。該如何操作。
-
透過LandXML格式進行資料的載入、輸出,支援地形、平面線形、縱斷線形、橫斷4部分。
Civil3D中選擇[輸出為LandXML],其資料可以從UC-win/Road的[工具]-[載入 LandXML]進行輸入。 - 3車道道路的中央希望指定1車道為公車專用。尤其希望從道路的起點開始便進行劃分。
-
從道路的起點開始,製作公車專用車道的順序如下:
- 現在的起點斷面左3車道-右3車道,在5m的位置重新設定一次。
- 起點的道路斷面重新按左1車道-右3車道製作。
- 5m的位置處因為可以連接上匝道,約5m距離處製作連接上匝道。
- 上匝道設置為左2車道的斷面。
- 透過在原有道路中讓公車行駛,上匝道中讓一般車輛行駛,實現中央指定車道的公車行駛。
- 遠景的樹木希望作為背景進行表現,想知道設定方法。
-
道路平面圖中在[背景的定義]中進行設定。
定義線形,定義結束後顯示[背景編輯]畫面,對高度、材質等進行調整。
背景材質也可以從RoadDB中下載。 - 描畫選項中關於太陽、月亮的位置,方位和仰角是朝向什麼方向。
-
方位是,正北0度、東90度、南180度、西270度時的角度。
仰角是,水平線為0度時的角度。 - 希望對Road的初始模型進行編輯。該如何操作。
-
Road的初始模型即使儲存也不成存為3DS形式,為此不能直接用建模軟體進行編輯。為了轉換成3DS格式的檔案,請使用模型轉換工具。
3.地形/街景地圖/航空照片
- 欲開發2Km×1Km程度的1座山透過VR進行表現。
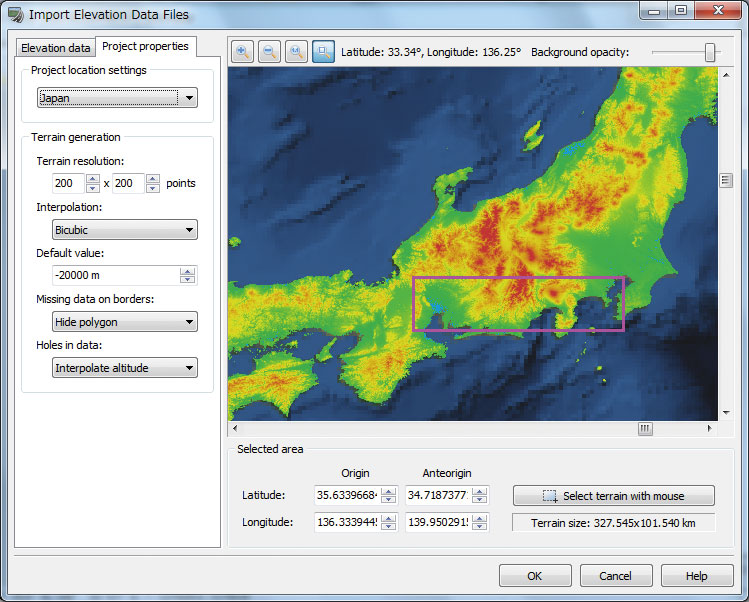
同時,計畫進行航空圖片的拍攝、航空測量,作為3D地形資料透過Road進行載入時,需要那種格式的資料。 -
如果是日本國內的山,UC-win/Road中標準附有50m網格標高資料,可作為通常的地形載入對應。
如果是任意的山,需透過xml格式,UC-win/Road可以向外部進行地形資料的處理。關於xml檔案格 式,請參考線上說明[技術筆記]-[關於地形 資料]-[外部地形資料的製作]。因為xml檔案本身是文字檔,可透過記事本等進行製作。如果有山體資料的 DXF檔案,可透過本公司提供的[UC- win/Road資料變換工具]中的[DXF變換工具]轉換成xml形式。
此外,如果有AutoDesk公司的Civil3D,可以與UC-win/Road實現動態地形資料的處理,將Civil3D支援的格式導入到UC-win/Road。 - 任意地形下載入地形修補資料,希望合成為50m網格地形是否可能。
-
原則上,在任意地形配置的任意地形修補上無法配置50m網格。但反之則可行。方法記述如下僅供參考。
- 任意地形修補在地形修補編輯畫面進行儲存。此時,地形補丁資料在任何坐標系均可在使用可能的狀態進行輸出。
- 輸出的xml檔案用記事本開啟,Origin的位置在Road坐標系的座標值下進行編輯,可收容載入了結果全點的地形。
- 載入配置地形,配置地形修補。
根據需要反復對2. 3.項進行操作,有可能需要對位置進行調整。因為地形修補無法重疊吻合,反復操作時請先刪除剛才配置的地形修補。
- 擁有當前世界測地系的測量座標,從世界測地系請說明地形修補XML的製作流程。
-
關於地形修補XML的製作,可使用記事本等文字編輯器按以下順序進行製作。再者,座標值、標高以m為單位輸入。
- 下述2行直接新增。
<·xml version=""1.0""·>
<!DOCTYPE UCwinRoadTerrain SYSTEM ""UCwinRoadTerrain.dtd""> - 地形版本,坐標系的設定請按下述新增。
<UCwinRoadTerrain version=""0.*"" coordinateSystem=""*"">
此處,version[0.2]coordinateSystem中輸入該測地坐標系的數值。任意坐標系時,設定為[0]。 - 請按下述所示設定原點。
<Origin north=""*****"" east=""*****""/>
此處north、east是從該測地坐標系分別設定座標的X、Y值。此時的座標值必須所屬在所載入範圍內的座標值。 - 下述格式中分別新增各標高點的標高。
<Point north=""***.**"" east=""**.**""height=""**.**""/>
north、east中分別輸入來自3)Origin的相對座標值。 - 作為結束xml,在最後一行新增下述命令。
</UCwinRoadTerrain> - 任意檔案名進行儲存。
此時的副檔名為[xml]。
再者,詳細在下述説明中也有記載,請參考。
[技術筆記]-[關於地形資料]-[外部地形資料的製作] - 下述2行直接新增。
- DXF變換後,是否可以變更載入的地形顏色。
-
功能表的[選項]-[描畫選項]的[地形]中,根據不同標高可設定地形圖像。
- 要貼上200張航空圖片,需要多少硬碟容量?
-
因為容量大小取決於每1枚圖片的大小(圖元),故無法預測此檔案容量會有多大。作為參考, 貼上約60張左右1100像素的方形圖片,Road資料的容量將會超過200MB。其中包含了道路在內。可以處理的檔案容量與電腦的記憶體等有關,故不能一概而論。如果容量過大,可以將像素降低後重新粘貼,達到減小容量的目的。
- 如何提高航空圖片的精美程度。
-
雖然根據原始圖片會有所不同,但可進行一定程度的最佳化設定。
勾選[讀取街區圖]的圖片品質,航空圖片每1張圖片的解析度為1100×1100像素,視為[標準解析度], 達到2000×2000像素左右則視為[高解析度]。
即使是500×500的[低解析度]圖片,勾選選項後將會比不勾選有一定改善。 - 如何精細調整地形。
-
如果是3D地形資料,透過換工具可對DXF·XML、或者LandXML進行載入。(需要另行工具、選項)
>> UC-win/Road 應用程式/各種工具類
>> UC-win/Road Option
沒有這些工具、選項,希望透過手工作業進行部分調整時,可透過地形修補的製作,新增或移動任意位置的標高點,並設定該標高點的高度,達到地形調整的目的。 - 如何隱藏湖泊的反射。
-
雖然很多時候會用到湖泊的反射功能,但有時不希望表現反射的話,調整透過率、材質、顏色,可以把反射設定得不顯眼。
如果想完全消除反射,可透過製作3DS模型,或者用地形來表現水面等辦法。 - 不希望生成填土。
-
[斷面編輯]畫面中,摘除填土生成的核取方塊,便不會進行填土的生成。
- 國土地理院的50m網格資料的基礎上載入SIMA資料時(合併載入),該如何配合其座標值。
-
SIMA資料變換工具所輸出的檔案(*.rd)的區畫如果與50m網格的區畫相同,可透過合併的形式載入。 順序如下。
- SIMA資料讀入前,透過工具內的[編輯]-[地形資料的設定]將左下的座標值、地形的範圍與50m網格的範圍吻合(此時設定的坐標系為0:任意坐標系即可)。
- SIMA資料載入後、輸出為RD檔案。
- UC-win/Road中載入同上地域。
- 與工具所輸出的RD檔案合併。
※進行合併時,坐標系、區劃範圍如不吻合則會出現錯誤。
- 世界測地系的原點在哪裡。
-
現在世界測地系分為19個坐標系區分。其中每個坐標系都設有原點。
福井縣因為所屬第6坐標系,其原點是北緯36度、東經136度。 - 無法設定比20km×20km更大範圍的區劃嗎。
-
UC-win/Road可以製作的空間最大為20km×20km。即將預定發佈的新一代產品[VR-Studio®]中則可對應更大空間。
- 聽說因為UC-win/Road的限制地形修補只能對應2000點,相當的低。
-
地形修補可以讀取更多頂點。曾在某項數據中讀取過20萬個點。
4.3D模型
- 3DMAX製作的模型導入UC-win/Road的方法?
-
3DMAX中將製作的模型儲存為3ds格式,在[模型的編輯]畫面,可將該檔案導入到UC-win/Road。
- 請說明關於MD3特徵人物的製作方法。
-
請參考下述資料。
示例動畫(AVI格式 663KB 0:09) - 用AutoCAD製作成的3D資料可以在UC-win/Road上進行導入嗎?
-
使用UC-win/Road DWG工具選項(付費外掛程式)就可以進行去導入。
透過匯出[3D模型],從以[3D空間面][區域][填充][網格][Surface][Object]所構成的3DCAD檔案導入面作為模型進行登錄。 - 用UC-1軟體進行設計討論後的模型可以在UC-win/Road上進行導入嗎?
-
運用以下方法可以進行導入。
- UC-1產品的畫面中右擊模型→選擇[輸出檔案]→選擇3ds檔案形式,然後登錄模型
- 從UC-win/Road的[模型編輯]畫面導入登錄後的檔案
5.交通流模擬
- 路線A上以60km時速行駛所生成的交通流,在某地點的交叉口左轉,改為時速40km行駛在路線B,該如何對其車輛輸入資訊。
-
在交叉口向路線B左轉後,在達到初始速度(此時的時速60km)之前保持加速。此時,為了在交差點左轉後其交通速度變為時速40km,在道路B上進入交叉口的位置設置に動作控制點,將透過該點的交通速度設定為時速40km。動作控制點在道路平面圖的路線上點右鍵,彈 出功能表中選擇[新增]-[動作控制點]進行配置,同樣可透過[編輯]按鈕進行編輯。
- 交叉口的透過速度根據路線不同而有所不同嗎。
-
交通流的速度由初始速度得到,之後根據交通狀況、車的重量各自有所變化。由此,交叉口的透過速度與路線無關,而是根據每台車輛的不同有所差異。
- 根據縱斷面坡度等,無需輸入動作控制點也會對速度產生變化影響嗎。
-
速度考慮了重力和車全體所具有的各種抵抗。由此,縱斷面坡度變化會對速度變化產生印象。如果是乘入客艙的狀態,上坡時如果不踩油門,將會減速直至停止。
- 關於交通量的生成方法,在模擬上是如何考慮的,是否有交通量生成。
-
交通量的生成方法
從A路線的起點方向生成1100台/時的交通量,上流階段為[1個]的時候,[時間可按3600secs、交通量可按1100/hr。 上流階段的[時間]是指[交通流生成的時間],設定了複數個的話,例如設定了3個階段[A:30secs、 B:50secs、C: 20secs]的時候,A在30秒生成後,接下來按B生成50秒、最後是C生成20秒,然後再按照[A → B → C]的順序迴圈。為此,[時間]按照複數個階段設定的情況下,有其意義,只有1個階段時其設定沒有特殊意義。
再者,此考慮方法是假設在道路端部有交叉口的情況,進入該路線的交通流根據號誌考慮其連續性變化,根據時間、交通流(單位時間的生成台數)及車輛設定檔(車輛的種類和比例)可做相應的變更。 - 關於高速生成
高速生成所生成的交通量,在有複數個路線的情況,向各路線的交通流分配是如何處理的。 畫面所表示的通量是表現什麼的交通量。 -
透過高速生成所生成的通量,在有複數個路線的情況下根據各路線設定的交通量進行分配。
畫面所顯示的交通量是所有線路中再生車輛數的合計。 - 希望進行交通流的重置,在哪裡可進行設定。
-
交通生成按鈕的右側,有交通流的暫停按鈕,再右邊的便是重新開機按鈕。需要將交通流重製時,請按下此按鈕。
- 輸入現狀交通量和現狀號誌週期,可再現現狀擁堵嗎。
-
可以。同時還有擁堵模擬的實績。
本公司首頁中看在有相關事例,敬請參照。
[UC-win/Road交通模擬應用事例
■伴隨大規模集客施設的建設交通需要的增加所導致擁堵發生的模擬] - 沿某道路,新建開店的大型CS向道路駛入車輛的表現(模擬)是否可以實現。(空閒狀態的道路中,來自CS的車輛駛入道路的情況,以及擁堵滯留時來自CS的車輛流入導入等情況)
-
可以。
在大型CS停車場出入口的位置製作交叉口,交叉口的編輯中將前面道路設定為優先道路(通往停車場的道路為[讓路])。有號誌的時候理所當然進行號誌控制設定。
設定交通量等,實施模擬。
進行簡易表現的話,無需製作交叉口,在停車場出入口附近新增任意交通流點,在此點進行交通流的發生、消失的設定,同樣可達到類似的模擬效果。
6.產品全般
- UC-win/Road的產品構成中有哪些版本?
-
有[Standard][Advanced][Driving Sim][Ultimate]這四種版本。 [Advanced]中附帶很多可與其他工具進行連接的單賣外掛程式。[Driving Sim]對應高度的駕駛模擬。
- 有舉辦產品的相關培訓會嗎?
-
以VR資料製作實務、基於VR的道路設計/城市建設體驗為首,隨時舉辦以3D印表機、可佩戴終端器等與VR的合作為主題的培訓會等。
相關培訓會詳情:https://www.forum8.co.jp/traditional/fair-cht-4.htm - 有演講時專用的產品嗎?
-
本公司有提供演講專用的版本。[Presentation Version]跟正規的許可證一樣可以利用各種演講功能。
- 儲存的資料是否可透過Trial版載入,請說明方法。
-
Traial版是購買前用於試用的產品。僅限於實現製作好的限定資料,無法載入一般正式版製作的資料。
- 用本軟體進行的模擬結果等,是否在日本國土交通省、或都道府縣等的行政機關有使用實績?
如果有的話,請給出實績列表。 -
暫時無法提供行政機關的實績列表,但在本公司首頁的競賽回顧中可看到行政機關相關的許多作品,請參照。
- 想要進行程式的演示。
-
請利用以下聯絡方式進行申請。
我們有實施讓指導員針對3D圖面・VR、各種分析・模擬的活用提案・支援。營業窗口:+886-2-2655-8375
- 想要體驗駕駛模擬器系統。
-
東京總公司的Showroom裡有6軸駕駛模擬器、7畫面駕駛模擬器等,可以體驗各種類型的模擬器。
請參照以下聯繫方式進行諮詢・申請。營業窗口:+886-2-2655-8375


LOADING
-