
UC-win/Road自訂系統 移動測量系統
程式概要
在測量/建設行業中作為3D資訊的應用案例,利用高精度的GPS移動測量裝置來測量點雲資料,讓依資料而做成的模型受到注目。
敝公司利用了三菱移動測量系統計 (MMS)測量海螢(umihotaru),並將測量到的資料進行轉換做成樣本資料。

▲涉谷的十字路口模型
相關資訊
程式的功能與特長
■提供透過點雲資料的VR建模・並支援UC-win/Road的服務
■提案針對點雲資料VR建模的自訂功能開發
主要特長/功能
-
- 點雲資料(Point-Cloud)是作為UC-win/Road中道路製作所必要的參考工具來使用
可作為MMS後處理工具或是VR建模工具,並可結合移動測量系統進行使用。 - 作為UC-win/Road・VR模型的逆分析工具來利用點雲資料
建議將點雲資料應用於VR模型的驗證。 例如:還可利用於確保製作資料精度以及變化、劣化等情況的維護。 - 資料檔案 :一個含有17,000,000座標值的EXCEL檔案
- 檔案格式 :X座標、Y座標、Z座標、R值、G值、B值
- 調查與設計:針對點雲資料的理解與使用程式
- 道路的區間以及配置:道路區間構築、在VR Mesh Reverse中進行對照、資訊獲取
- 製作建築物模型時,模型配置以及模型製作可以利用點雲資料來測定正確構造
- 學習如何調整UC-win/RoadVR資料、使用點雲以及如何製作道路資料
- 在完全3D的狀態中正確測定物件物以及道路。
- 對項目的理解力高
- 是完整進行資料驗證的方法
- 可利用於CAD設計與Google Earth Measurement間達成聯合制作
- 資料測量所需時間較長
- 資料使用方法較難、需要較長的學習時間
- 需要記憶體容量較大的電腦
- 原始的資料格式
- 檔案格式:X座標、Y座標、Z座標(高度)、R值、G值、B值
- 利用Wordpad打開檔案(因為資料容量的限制,無法在Excel以及Notepad中打開)
- 將檔案作為txt.格式保存文字檔
- 為了將文字檔分割成1,000,000個,而使用GSplit程式
GSplit(免費軟體) http://www.gdgsoft.com/gsplit/
●透過移動測量的點雲資料應用
●樣本資料
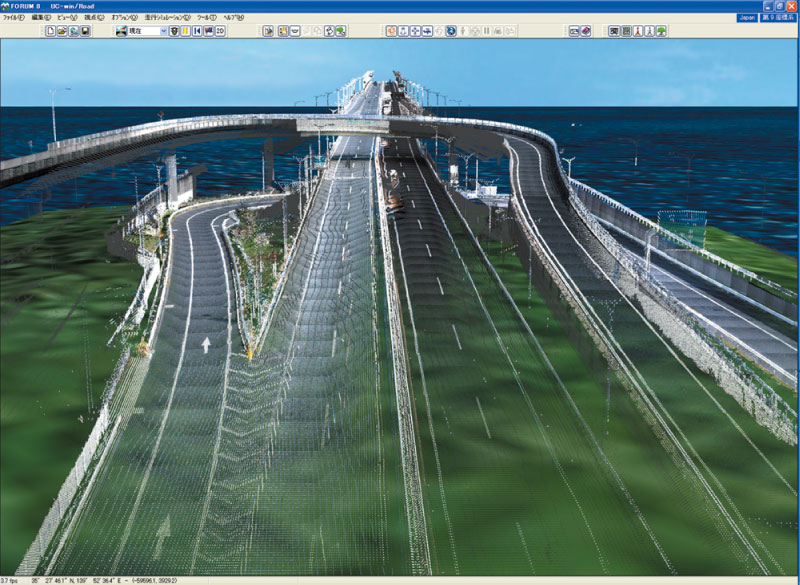
海螢-umihotaru-(東京灣跨海公路)樣本資料的製作概要
海螢是東京灣跨海公路的海上人工島,因為其擁有立體交叉匝道、隧道、橋樑、停車場等複雜的構造,所以非常適合做為理解點雲資料中建物的優缺點之樣本。
樣本資料裡有交叉匝道、隧道、橋樑、停車場等複雜的構造物。
現在,用一般的建模工具進行調整後,將縮短在UC-Win/Road中建模的時間。
●工程的詳細介紹
●關於參考用點雲資料的優點與缺點
優點
缺點
●資料格式與使用方法
●檔案轉換步驟
●VR Mesh Reverse概要與利用方法
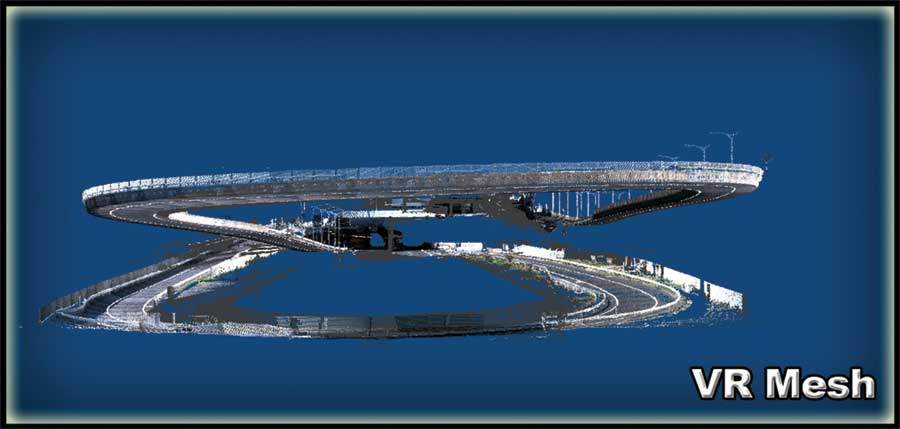
在海螢的企劃中,作為結果的17個文字檔中包含了1,000,000座標(含RGB值)。「VR Mesh Reverse」是作為可使用的程式之一。
VR Mesh Reverse的顯著優點是,藉由將LOD設為有效、無效的功能來對有幾百萬座標點的檔案進行操作。
可以正確地測定道路設計、物件物配置等基本內容。VR Mesh Reverse對於對應高性能電腦且進行了個別化。最後,可透過同時利用17,000,000座標的VR Mesh Reverse功能來流覽點雲3D中的資料,藉此達成理解資料的構築方法。
●製作項目與所需天數(海螢資料)
製作項目 必要天數 備註 1. 調查與設計 5天 調查與包含設計時使用的軟體調查
調查由株式會社 FORUM8公司實施2. 道路區間以及配置 3天 3. 建築物模型 1天 4. VR資料調整 2天 - 點雲資料(Point-Cloud)是作為UC-win/Road中道路製作所必要的參考工具來使用
UC-win/Road 點雲數據外掛程式
-
UC-win/Road點雲資料外掛程式具備了以導入點雲資料為首,並含有以下的功能。 在3DVR空間中導入利用雷射掃描器等測量技術所測量的點雲資料(例如:藉由車輛行駛測量、飛機測量等得出的點雲資料(Point-Cloud)),並將點雲描繪顯示在指定的位置等基本功能。
可用雷射掃描器掃描的點雲資料來生成地形TIN資料,並利用地形補丁功能進行地形建模。
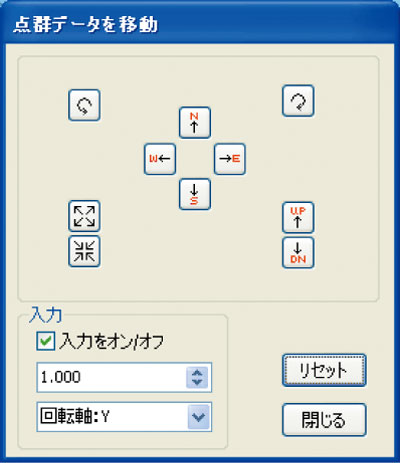
在3D空間上並行移動、旋轉移動點雲資料來進行調整,還可以微調顯示位置。
基於點雲資料生成的地形資料,可以輸出為LandXML資料後應用於其他系統。
▲點雲數據導入

▲點雲資料導入、描繪顯示
▲點雲描繪選項
▲地形TIN資料生成、地形建模

▲點雲資料位置調整

VR網格功能概要
-
上百萬點雲資料使用中不可缺少的VR Mesh功能介紹
VR Mesh Reverse : 價格 $695.00US Virtual Grid公司 ( http://www.vrmesh.com/products/reverse.asp )
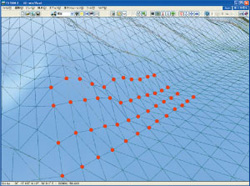
▲同時使用17,000,000點雲的LOD功能
▲表現Window Clip中一部分的範圍
▲透過UC-win/Road資料製作測定點雲資訊
選擇上部的Analyze開始測定。
接著選擇Measure Distance後,點擊資料的2個點雲測定距離。
在介面中保持上次測定結果的同時還可測定點雲。
然而,工具掌握著不同的座標面,所以需要時間來適應。
運用點雲資料製作的UC-win/Road模型概要
-
- 點雲資料是作為UC-win/Road道路製作必要的參照工具來使用
可作為MMS後處理工具或是VR建模工具,並可結合移動測量系統進行使用。 - 作為UC-win/RoadVR模型的逆分析工具來使用點雲資料
建議在VR模型驗證中利用點雲資料。
例如:可以利用於確保製作資料精度以及年代變化、劣化等情況的維護。
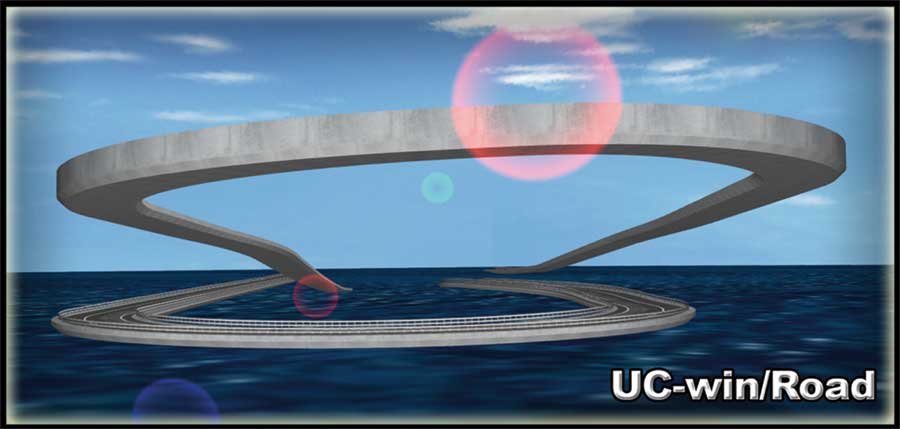
參考點雲資料進行道路線形、截面定義。完成的VR模型為高精度的構造模型。可以應用於交通流量、各種演示、協定等。
▲道路線形定義
▲縱斷線形定義
▲截面定義

▲瞬間生成道路(初始模型)
生成交通流後可直接進行交通模擬
▲追加建築物模與道路附加物等資料


點雲資料應用提案
- 點雲資料是作為UC-win/Road道路製作必要的參照工具來使用




三菱移動測量系統
-
- 車頂上裝備3台GPS天線、IMU、攝影機、雷射掃描器為一體的裝備。所有機器在工廠內已調整完畢,不需複雜的調整與裝設。將3台GPS設置成三角形,可補捉到高精度的車輛形狀。
- 開發了給100msec解析度中所獲取的資料,且追加時間的感應盒。即使高速行駛也不降低資料收集精度。最多可連接5台攝影機、雷射掃描器。
- 製作道路附圖的現況平面圖
- 點雲CAD化用於施工前後管理
- 3D地圖製作時用的數據基準
- 確認道路周邊情況
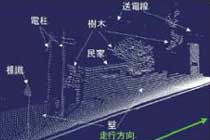
- 將螢光筆跟相片一同使用,不只可以特定
號誌、電線桿、紅綠燈、緣石等立體物,還可標定斑馬線、路面標誌的位置。
三菱移動測量系統 -高精度GPS移動測量裝備-
三菱電機 三菱移動測量系統 高精度GPS移動測量裝備
http://www.mitsubishielectric.co.jp/pas/mms/
測量

地圖製作

設備・道路管理
▼使用雷射掃描器與攝影機來標定物件的位置,簡單製作高精度城市3D地圖。

產品價格
軟體價格
-
■軟體價格
產品名稱
價格
產品構成
UC-win/Road Ultimate open UC-win/Road 本體
+
全部功能外掛程式UC-win/Road Advanced open UC-win/Road 本體
+
UC-win/Road 點雲建模外掛程式 與
其他所有外掛程式UC-win/Road 點雲建模外掛程式 open 單獨外掛程式 ■浮動授權價格
額外支付定價的40%,將可以在任意地點和任意PC上使用。
產品名稱
價格
UC-win/Road Ultimate open UC-win/Road Advanced open UC-win/Road 點雲建模外掛程式 open
>>點擊查看授權詳情
訂閱價格
訂閱價格
-
■服務內容
・免費提供版本升級 ・電話技術諮詢服務
・諮詢服務(電子郵件、FAX) ・下載服務 ・維護資訊傳送服務
※以授權管理的成本刪減、加強對應產品使用需求的多樣化為目的,今後更加便利的「訂閱服務」將逐步取代以往的維護資訊傳送服務(2016年4月1日~)。
對象產品 第一年度 每年 訂閱(UC-win/Road 點雲建模外掛程式) 無償 open 訂閱(UC-win/Road 點雲建模外掛程式 浮動授權) open
租賃/浮動授權價格
■租賃授權:短期使用,價格低廉
■浮動授權:透過網路認證,可以在任意地點、任意電腦使用
■臨時授權:可以在現有產品授權的基礎上臨時增加授權數量。以租賃許可期限(1到3個月)為單位進行授權,並根據使用記錄進行收費。提前預約,可享受租賃授權15%的價格優惠。可以透過使用者資訊頁面來申請。
※為了提升服務品質與便利性「租賃/浮動授權」於2007年9月3日開始提供服務。
※租賃授權或浮動授權開始後無法更改期限,如需延長期限需要再次申請。
租賃/浮動授權
-
■租賃授權
對象產品 1個月 2個月 3個月 6個月 UC-win/Road 點雲建模外掛程式 open open open open ■浮動授權
對象產品 1個月 2個月 3個月 6個月 UC-win/Road 點雲建模外掛程式 open open open open 產品購買/諮詢窗口
產品購買/諮詢窗口
-
UC-win/Road 諮詢窗口:road@forum8.co.jp
支援信用卡及無利息分期付款。
有任何疑問請傳郵件給(vc@forum8.co.jp)。國內各代理店均接受諮詢。
網頁相關的問題敬請洽詢forum8@forum8.co.jp。


LOADING