| UC-win系列 | 模擬 |
|
|||||||||||||||||||||||||||||
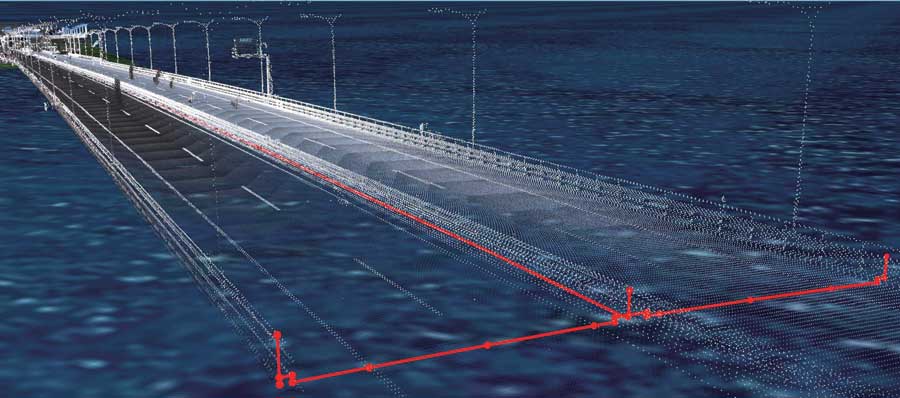
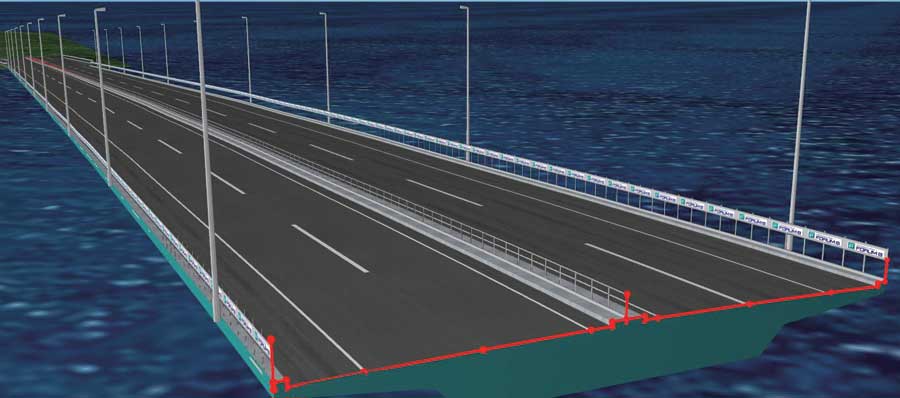
| 支援道路工程、公共工程上方案探討的3D即時VR軟體 國際語言版(對應日文/英文/繁體中文/簡體中文/韓文/義大利文/法文) 初版發行:2000.05.09/最新版發售:2019.10.30 |
|||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||
| English | Japanese | Korean | Chinese | Francais | Home | Back |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||










































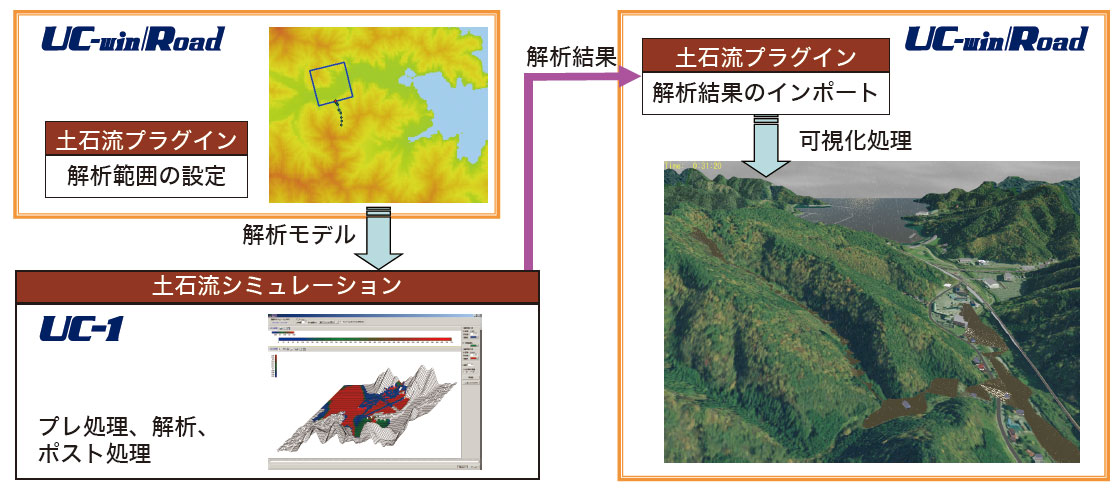

























 單賣選項
單賣選項