| UC-win/Road Ver.5.1 |
|
|||
| 3차원 리얼타임 VR소프트웨어 패키지 |
| 가격 ● 580,000엔~(세금포함 609,000~엔)(신규)/무상 리비전업 릴리스 ● 2011년 1월 |
시뮬레이션 |
| New Products | ||||||||||
|
||||||||||
| 차량 운동 모델의 개량 |
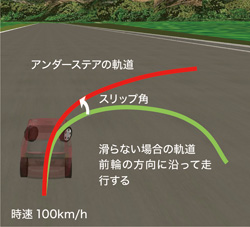
| 보다 리얼한 운동 표현이 가능하게 자동차(4륜차)의 운동 모델에 개량을 실시함으로써 UC-win/Road에서의 드라이빙 시뮬레이션의 충실도가 개선되었습니다. 운전중의 차량 전체의 움직임, 엔진, 엔진에서 차륜까지의 각 전달 장치의 모델을 탑재하여 보다 리얼한 운동의 표현이 가능하게 되었습니다. 이것에 의해 이하와티 같은 현상이 재현됩니다. ■차의 옆미끄러짐: 언더스티어와 오버스티어의 표현이 가능합니다. ■언더스티어: 고속으로 주행할 때, 앞바퀴의 각도를 저속 주행시보다 크게 하지 않으면 차가 차가 동일하게 돌지 않는 현상입니다(그림1). 속도가 너무 높으면 스티어링 핸들을 돌려도 차가 거의 돌지 않는 경우가 있어, 안전한 운전을 할 수 없습니다.
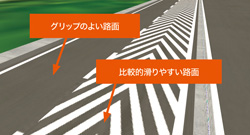
■오버스티어: 도는 도중에 뒷바퀴가 미끄러져 통상보다 급한 회전이 발생하는 현상입니다. ■전후방향의 미끄러짐: 차량의 진행방향에 차량이 미끄러지는 표현이 가능합니다. 특히 미끄러지기 쉬운 노면상에서 급발진 또는 급브레이크에 의해 발생하는 현상으로, 이 미끄러짐에 의해 가속 성능이 저하하여 정지 거리가 길어집니다. ■노면과 타이어의 속성에 의한 그립 성능: 노면의 마찰계수를 설정하여 다양한 노면 상태를 재현할 수 있습니다. 이것에 의해 건조한 노면 뿐만 아니라 눈, 물, 빙상에서의 차량의 주행 특성이 표현 가능해 졌습니다(그림2). 또한 백선과 노면의 그립의 차이도 설정할 수 있습니다. 노면의 설정에 맞춰서 각 차량의 마찰계수를 설정할 수 있기 때문에 각각의 차량의 특성이 상세하게 재현됩니다. 현실에는 규제속도, 노면의 상황, 차의 특성을 고려하여 주행할 필요가 있습니다. 이번에 릴리스하는 기능으로 타이어의 미끄러짐을 표현함으로써 현실에 가까운 조건에서 주행할 수 있게 됩니다.
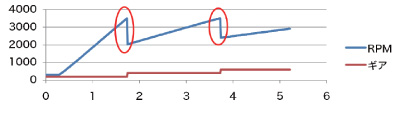
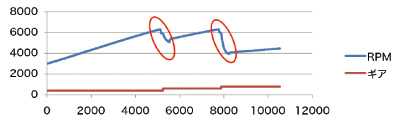
수동에서의 기어 체인지를 가능하게 함과 동시에 자동 기어 체인지의 모델을 개선했습니다. 이것에 의해 기어 시프트시의 엔진 회전수의 변화가 종래보다 매끄럽게 되었습니다(그림3, 4).
■차륜의 회전 속도의 충실도: 차륜마다 회전속도를 계산하도록 개선했습니다. 커브시, 내측과 외측의 차륜이 다른 속도로 회전하거나, 브레이크를 강하게 밟으면 브레이크가 걸린 차륜이 멈춰서 노면상에 미끄러지는 등의 현상이 표현 가능하게 되었습니다. ■후퇴: 차량의 운동 모델에서 후퇴 주행이 가능하게 되었습니다. ■차량의 운동 모델의 선택: 종래의 운동 모델과 이번에 새롭게 개발한 모델로부터 사용할 모델을 선택할 수 있습니다. VR공간에서의 주행에 익숙하지 않은 분이나 어린이용 체험 시뮬레이터등, 필요에 따라서 보다 단순한 종래의 모델을 선택 가능합니다. |
| 운동 모델의 구성 |
| UC-win/Road에서 모델화 한 주요 파트는 하기와 같습니다. ■엔진: 액셀 페달의 조작량에 의해 엔진의 토크를 계산합니다. 엔진에서 최대의 토크와 최소의 토크, 2개의 커브를 가지고 엑셀시와 엔진 브레이크를 표현합니다. UC-win/Road 5.1에서는 최소 토크(엔진 브레이크)의 커브는 편집할 수 있게 됩니다. ■클러치: 엔진의 회전축과 변속장치의 회전축을 결합하는 것으로, 클러치의 겹합 상태에 의해 엔진에서 일부 또는 전체의 토크를 변속장치에 전합니다. 클러치가 끊어져 있으면 엔진이 저항없이 회전합니다. 반대로 클러치가 연결되어 있으면 엔진과 차륜의 회전속도가 연계되어 있습니다. 따라서 클러치의 결합 상태에 의해 변속장치에 전하는 힘 및 엔진의 회전수를 계산합니다. ■변속장치: 엔진의 힘을 어느 비율로 다음의 차동장치에 전달합니다. 자동차 내부의 각 기어를 실현합니다. ■오토 클러치 제어: 클러치의 결합 상태의 제어 및 기어의 선택을 하는 모듈입니다. UC-win/Road에서의 자동차의 거동 모델은 매뉴얼차에 가까운 것이지만, 오토매틱차를 표현하기 위해서 오토 클러치 장치를 탑재했습니다. 이것은 매뉴얼차에 있는 클러치 및 변속장치를 자동적으로 제어하는 것입니다. 또한 발진시, 브레이크시, 통상 주행이라고 하는 상황에 따라서 클러치, 시프트업과 시프트다운의 조작을 실시합니다. ■차동장치: 커브를 돌 때 내측의 차륜과 외측 차륜의 속도의 차가 생깁니다. 엔진으로부터 출력되는 1개의 토크를 분배하여 각각의 차륜이 다른 속도로 회전할 수 있도록 차동장치가 사용되고 있습니다. 물리적으로 보면, 저항력이 적은 차륜에 많은 토크가 전달됩니다. 차가 돌 때에는 외측의 차륜이 내측의 차륜보다 빨리 나아갑니다. 그 결과, 외측의 차륜에는 노면에서 생기는 저항력이 적기 때문에 토크는 외측의 차륜에 의해 많이 전달됩니다. 또한 좌측의 차륜이 빙상의 표면을 달리고, 우측은 건조한 노면이라면 좌측의 차륜이 미끄러져서 빨리 회전하는 현상도 있습니다. ■차동장치의 구성: 차종에 의해 실제로 사용되는 차동장치의 수가 다릅니다. 전륜과 후륜에 엔진의 토크를 전달하는 경우는 (4WD차) 앞과 뒤의 토크를 나누는 차동장치를 사용하고, 또 전륜과 후륜에 있어서 좌우를 나누는 2개의 차동장치를 사용합니다. 전륜 혹은 후륜에만 엔진의 토크를 전달하면 1개의 차동장치가 사용됩니다. 전륜에 토크를 전달하면 프런트프런트(FF)라고 말하며, 후륜에 전달하는 경우는 프런트리어(FR)라고 말합니다. ■차륜: 엔진에서 출력되는 토크가 각 전달장치를 통해 차륜에 전해집니다. 이 토크에 더불어 브레이크 토크, 노면의 마찰에 있어서의 토크가 차륜을 어느 속도로 회전시킵니다. 또한 이 회전에 의해 차륜이 노면에 닿는 힘이 있습니다. 노면에서 보면(바깥에서 보면)노면이 각 차륜에 힘이 걸어, 그 힘이 차륜에 전달되어 차량을 움직입니다. 좌우의 힘이 다르면 우력이 작용해 차가 회전합니다. ■중심의 위치: UC-win/Road에서 중심의 위치를 설정하는 것이 가능합니다. 이 위치에 의해 각 차륜에 걸리는 중력이 변하기 때문에 차륜에 있어서의 마찰력이 변화합니다. 예를 들면, 중심의 위치를 변경시키면 FR(프런트・리어)와 MR(미들・리어)의 차의 구별을 할 수 있습니다. FR에서는 엔진이 차의 앞에 놓여져 있지만, MR의 경우는 차의 중앙에 놓여져 있습니다. 엔진이 무겁기 때문에 놓여지는 위치에 따라 차량 중심의 위치가 바뀝니다.
|
| 설정 항목의 상세 |
| ■마찰계수의 커브: 노면과 타이어 사이에 발생하는 마찰력을 정의하는 커브입니다. 자동차의 물리 모델에서 마찰력을 계산하는 모델이 많이 존재합니다. 타이어의 미끄러짐을 표현하기 위해서 복잡한 유한요소법에서 비교적 단순한 클론마찰법칙까지 다양한 모델이 있습니다. UC-win/Road에서는 슬립비(Slip Ratio)에 의한 마찰계수의 커브를 사용합니다. 이 커브는 편집 가능하며 노면의 속성을 가지게 함으로써 다양한 노면의 상태를 설정하는 것이 가능해집니다. 슬립비는 차량의 속도와 타이어 외측의 표면의 속도의 차이를 나타내고 있습니다. 슬립비의 식은 하기와 같습니다.
통상, [-0.1 .. 0.1]의 사이에서는 차는 거의 미끄러지지 않는다고 보며, 슬립비에 의해 마찰계수가 선형으로 변화합니다. 슬립비의 값이 0.1보다 큰 경우는 차가 미끄러지면서 가속하고 미끄러지고 있는 상태에서 마찰계수가 거의 일정값이 됩니다. 또 -0.1보다 작은 경우는 미끄러지면서 감속하고 마찬가지로 미끄러지고 있는 상태에서 마찰계수가 거의 일정값이 됩니다(그림6).
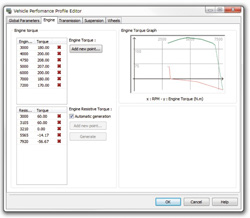
■엔진: 엔진의 최대 토크 및 최소 토크를 설정할 수 있습니다(그림7). 게다가 엔진의 회전 속도를 계산하기 위해서 엔진의 관성모멘트가 필요합니다. 엔진의 관성모멘트도 설정 가능합니다.
■기어의 설정: 변속장치의 설정에서 각 기어의 비 및 후퇴의 기어비가 설정 가능합니다. 기어 체인지의 모드는 오토매틱과 매뉴얼로부터 선택할 수 있습니다. ■차동장치의 구성: 엔진의 힘 등의 차륜에 전달되는가를 설정하기 위해서 차동장치의 구성을 선택할 수 있습니다. 2WD의 FF, FR 그리고 4WD의 구성의 표현이 가능합니다. ■파이널 드라이브비, 전달의 성능: 이 파라미터에서 전달의 최종적인 비 및 성능의 설정이 가능합니다. ■요각의 관성모멘트: 차의 회전의 계산에 사용하는 파라미터입니다. 관성모멘트가 커지면 차의 반응이 늦어집니다. ■중심의 위치: 중심의 위치를 설정함으로써 질량의 배치(엔진의 위치, 승객의 위치)를 설정할 수 있습니다. ■브레이크력의 분배: 전륜과 후륜에 있어서 브레이크 응력의 비율을 설정할 수 있게 됩니다. ■차륜: 관성모멘트에서 차륜의 회전수의 계산에 사용하는 파라미터입니다. 관성모멘트가 커지면 차륜의 반응이 늦어집니다. 차륜 회전에 의한 마찰계수 및 차륜 반경도 설정 가능합니다. |
| 충돌 처리의 개선 |
| 미래의 버전에서는 자차가 갓길에 접촉했을 때, 도로의 진행방향에 차량을 되돌리고 속도를 낮추는 처리를 실행했었습니다. 이번에 릴리스하는
프로그램에서는 이 처리를 개선하여 자차가 갓길에 접촉했을 때에 갓길을 넘지 않도록 차량에 힘을 싫는 처리를 탑재했습니다. 이것에 의해, 차량의 방향과 속도가 급격히 변화하지 않고 힘을 걸기 때문에 서스펜션의 움직임도 알 수 있으며 벽에 부딪힌 것과 같은 효과가 됩니다. 앞으로도 이 처리를 개선하여 다른 차량과의 접촉 판정도 개발할 예정입니다. |
| 노면 속성 |
| 노면과 차륜의 사이에서 발생하는 마찰력을 계산하기 위해서, 마찰계수가 필요합니다. 계산중에서는 슬립비에 의한 마찰계수의 커브를
이용하지만, 이 커브를 노면의 속성으로써 설정합니다. 또한 각 차량의 설정으로써 마찰비율만을 설정합니다. 최종적인 마찰계수는 현재 주행하고 있는 노면의 마찰계수 커브를 차량의 마찰비율에 곱해서 구합니다. 노면의 설정은 도로의 횡단면에 사용하는 텍스처마다 설정 가능하게 됩니다. 주행하는 차도안에서 각 차선의 텍스처 및 백선의 텍스처를 설정하면 섬세한 효과를 얻을 수 있습니다(그림8). 향후의 개발에서는 차도 이외의 표면을 주행할 수 있도록 해나갈 예정입니다.
|
| 터널 조명 기능 |
| UC-win/Road 5.1에서 터널 공간의 조명을 설정할 수 있게 되었습니다(그림9). 터널마다 조명의 색과 강약을 설정합니다.
또한 설정 항목은 1개로, 색의 밝기로 조명의 강약이 바뀝니다. 터널의 조명 기능을 사용하면, 터널내의 조명과 외부의 태양광의 구별이 가능해지며, 보다 충실한 표현이 됩니다. 터널내의 조명은 터널에 들어가는 교통차량, 도로의 부속물에 적용됩니다. 특히 개선된 점은, 자차의 콕핏의 표현, 터널의 입구와 출구의 표현이 됩니다(그림10, 11). 그리고 이 버전에서는 임의의 모델의 배치에서 터널안에 모델을 배치한 경우에는 조명 기능은 유효하지 않습니다.
|
| VISSIM대응 |
| UC-win/Road 5.1에서는 VISSIM의 교통흐름 해석 결과를 읽어들여 가시화 할 수 있게 되었습니다. VISSIM은 PTV사에
의해 개발된 교통흐름 시뮬레이션 소프트웨어로, 보행자와 자동차의 교통 시뮬레이션을 통합한 솔루션입니다(URL:http://www.vissim.de). 마이크로 시뮬레이션 플레이어를 이용하여 VISSIM의 ANI.TXT파일을 UC-win/Road로 읽어들입니다. 시뮬레이션 결과를 읽어들인 후, 시뮬레이션을 표시할 위치를 설정하고 차량과 보행자를 어느 모델로 표시할 것인가를 설정합니다. 최종적으로는 동영상 파일과 같이 교통 해석 결과의 재생을 조작하여 3D공간안에서 교통의 상황을 확인할 수 있습니다(그림12).
|
| (Up&Coming '11 신년호 게재) | ||
 |

|

| �L�����y�[�����{�� | ||||
|
| �Z�~�i�[�E�C�x���g�J�����_�[ | ||||||||
�J�Êԋ߂̃Z�~�i�[
|
�\�t�g�E�F�A�^�x���T�[�r�X
|
|||||||