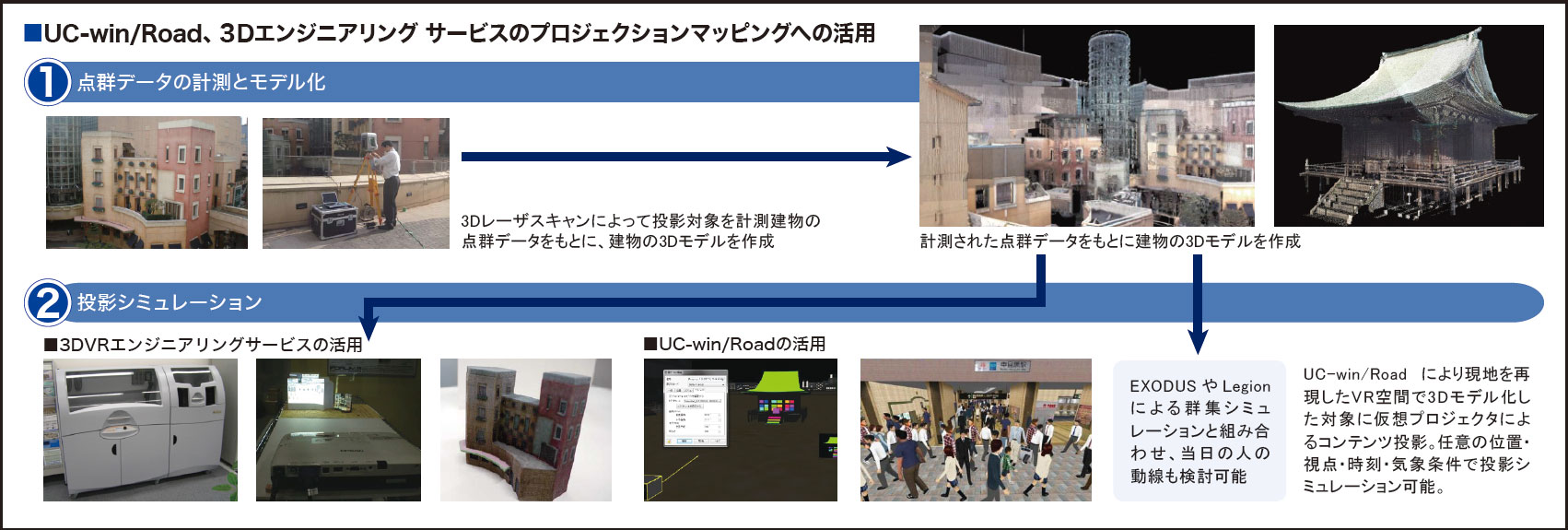
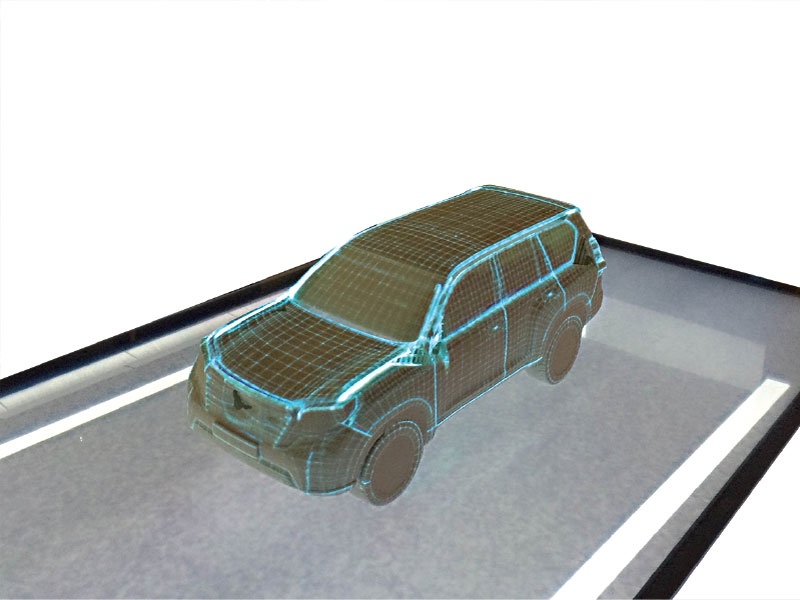
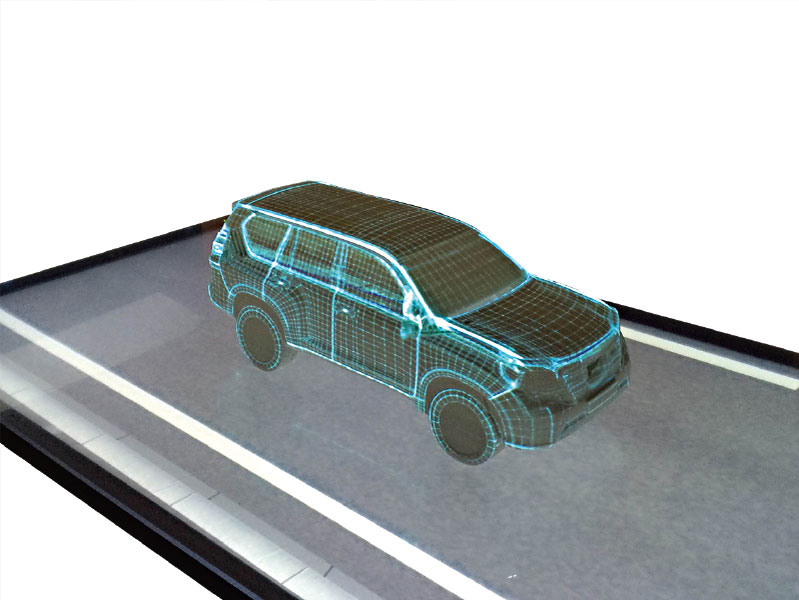
| ●UC-win/Road for RoboCar®
汽车机器人平台と和VR的融合
UC-win/Road可以短时间内轻松地制作成的大规模仿真空间。通过与RoboCar®连接,不仅仅是VR,可以用于混合现实的模拟器。可以期待被各种模拟器所活用。
■RoboCar®
将
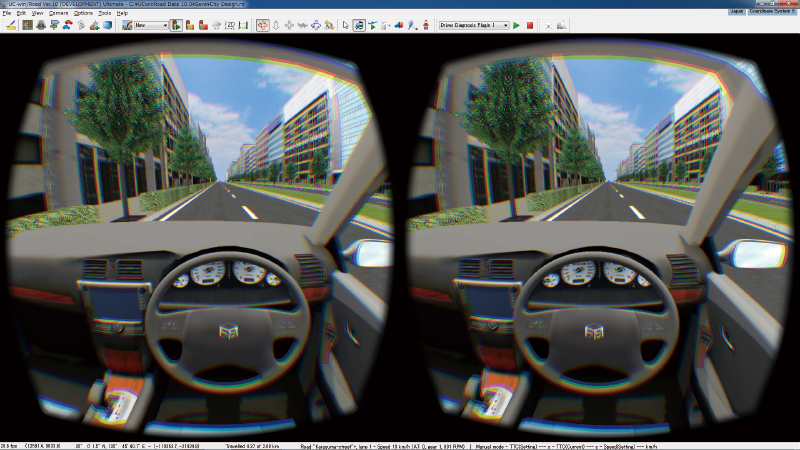
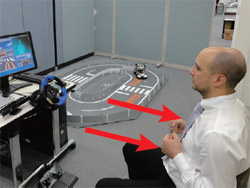
驾驶模拟功能非常充实的现实仿真软件UC-win/Road与搭载了汽车机器人平台的机器人技术相结合。是在VR空间内,在模型道路上控制并驾驶体积为实
车的10分之一的模型车的VR模拟系统。通过利用在VR上所表现的假想现实空间,可以表现出精致的空间,多种多样的交通环境、设定脚本进行试行。
■UC-win/Road与RoboCar®相连接
UC-win/Road上可以表现精致的空间,多种多样的交通环境、设定脚本并且行驶。其次,RoboCar®的特长是体积只有实车的10分之一的模型可以在现实空间内行驶。通过组合这些特征,可实现在虚拟现实环境中无法验证的复合现实的模拟。 |
|  |
|  | | ▲在模型中制作驾驶环境(左图)、在VR空间内进行模拟驾驶(右图) |
|
| |
|
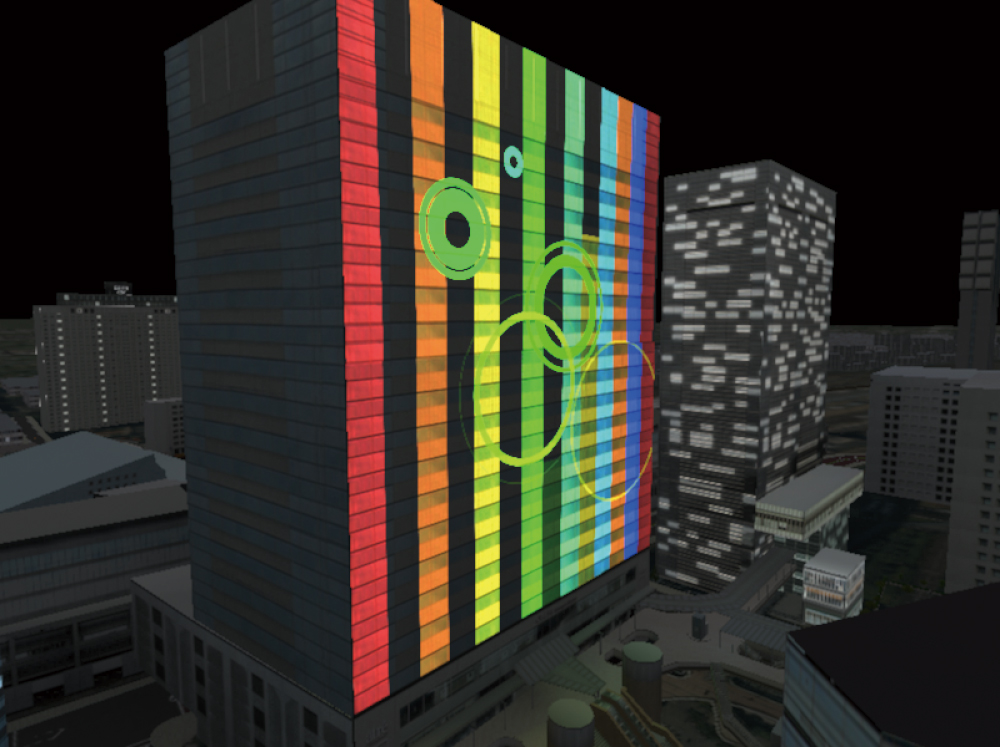
| ●Mind&VR UC-win/Road for MindWave Mobile
使用脑电波测试装置MindWave Mobile在UC-win/Road上进行驾驶模拟
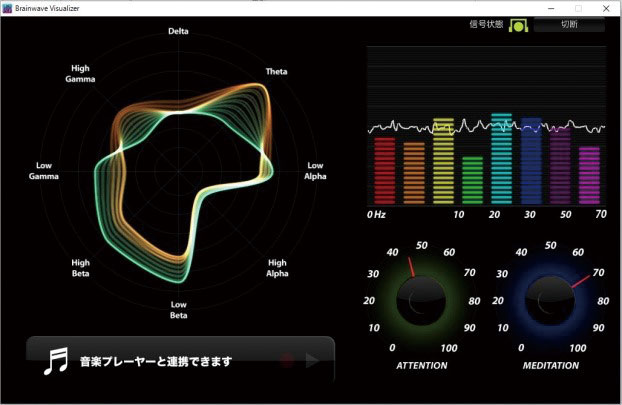
MindWave Mobile(开发公司:NeuroSky)是装载了脑电波感知器的无线立体声装置。戴上它,会测出alpha、beta等不同频率的脑波。并且通过独自的演算法把脑电波与注意力集中程度、放松程度等心理状态进行转换。
MindWave Mobile插件与VR数据项结合,运用所取得的数据可以进行操作模拟。左图的驾驶模拟是通过主力已的集中度来控制速度,如果凝视画面中的一个点速度就会变快,注意力散漫的话速度就会变慢。
|  | 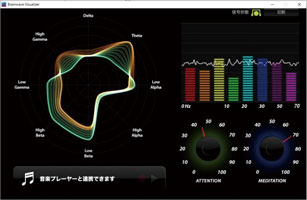 | | ▲MindWave Mobile(Neurosky) | ▲“脑电波Visualizer”(Neurosky) |
■活用事例
脑电波Driving ~运用脳波来驾驶!~ UC-win/Road MindWave Mobile插件
戴上MindWave Mobile,在连接好的状态下开始驾驶模拟的话就可以根据脑电波来行驶。
用脑电波来控制车辆的油门跟刹车。
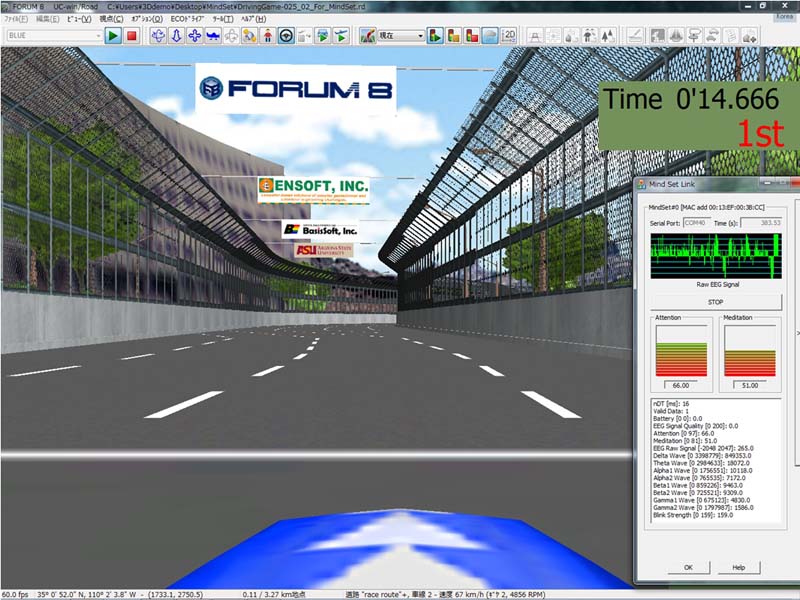
F1赛道
作为EEG技术应用事例列举了F1赛道。实时(@60Hz)读取2套MindSet设备,开发了 可抽出Meditation和Attention系数的接口。
 |  | | ▲Phoenix F1 circuit | ▲具有游戏性,作为展示用系统受到好评 |
|
|
●自主飞行UAV
自动飞行监控系统
■通过鼠标、键盘进行操作 通信信息等数据利用Wi-Fi进行无线传输
■通过内置计算机自动控制平衡。上升、下降、前后左右的移动等高难度动作可简单实现
■使用前置照相机、高速照相机确认,可通过FLY-DV照相机进行详细记录
■通过GPS测定AR.Drone的位置
■通过9D0F IMU (轴惯性计测装置/Inertial Measurement Unit),测定加速度、陀螺仪、地磁气,确认AR.Drone的方向
■通过红外线测距传感器避难与障碍物发生冲突
微型无人机扫描系统(MAPs)
国土交通局的创建下一代社会基础设施用的机器人
在现场探讨对象技术中使用UAV。(2014年7月10日)
桥梁维持管理领域
「利用与3DVR连接的自主飞行型UAV的建筑物调查系统」 |
| 采用项目
- 近距离观望钢筋混凝土桥
- 近距离观望混凝土路面
|
|
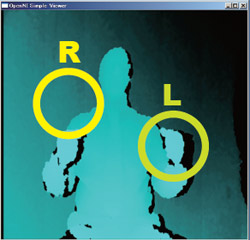
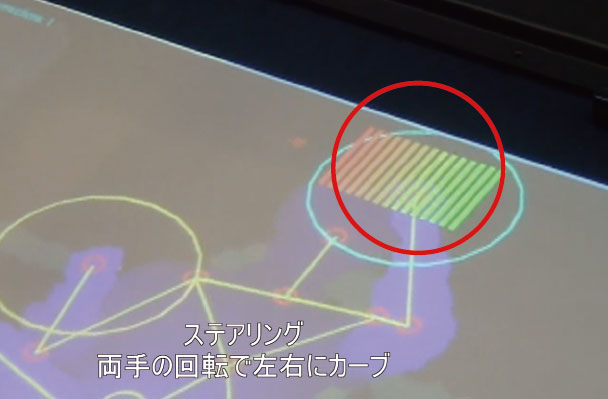
| ●Kinect™驾驶模拟器
通过红外线深度传感器进行UC-win/Road驾驶操作的系统
在Kinect前面像操舵操作一样进行UC-win/Road驾驶操作的系统。
Kinect™检出的驾驶员两手的位置信息转换为车辆的操舵,油门,刹车。
通过红外线深度传感器进行车辆控制和驾驶操作的示意
在Kinect前面像操舵操作一样进行UC-win/Road驾驶操作的系统。Kinect™检出的驾驶员两手的位置信息转换为车辆 的操舵,油门,刹车。
 |
|  | | ▲方向盘操作(右转弯・左转弯) | 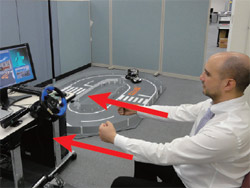 |
|  | | ▲油门操作 |
| ▲刹车操作
|
|
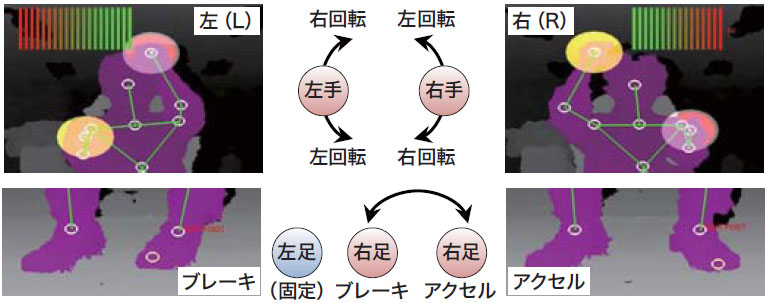
| ●UC-win/Road Air Driving 应用技术 无需控制设备实现细致、高精度的驾驶操作。
骨架识别
红外线深度感应器通过距离信息检测出同一物体来识别人体特征。采取特定的举动时会进行校正识别骨架结构。
|
|  |
| 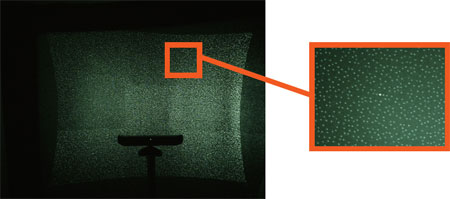 | | ▲Kinect(TM)传感器 | ▲红外线激光的情况 |
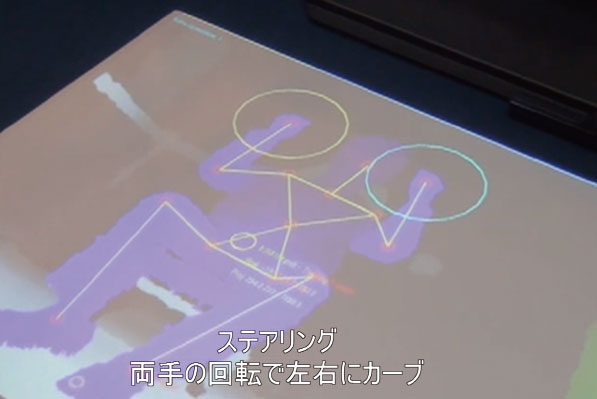
方向盘的方向以及转向量的检测
从出拳的左右手的位置来检测出左转、右转的方向以及角度的模拟值。检测量从绿色到红色的变化显示在变化棒上。越接近红色说明越受到控制。
测出油门、刹车的踩踏量
踩踏量从脚趾的位置开始测出模拟值
●油门: 检测结果显示向上。
●刹车: 检测结果显示向下。 |
|  |
|  | ▲前进
| ▲右转弯:越向右转弯,
右方的条中红色就会变多。 |
|
| ●使用红外线深度感应器的多集群数字标牌系统
多画面6K显示器和利用红外线深度传感器的互动操作(双向)数字标牌系统。
利用手势、动作可进行直观操作。
手势界面与运动捕捉功能可以互动地操作。输入使用Xtion PRO红外线深度传感器。通过直观的操作,与传统的互动标牌相比较可以期待更高的集客率。
我们也提供多集群系统与UC-win/Road的集群功能的实时VR模拟,使用了超级云®的CG渲染服务等相关的服务。
 |  | ▲6K数字标牌ジAirDriving
(东京Gameshow2011) | ▲AirDriving 界面 |
 |
| 新的咨询服务 「超级计算机®」
活用了超级计算机特有的高级演算性能,提供大规模的分析、模拟、CG渲染等服务 |
「超级计算机® CG视频服务」是用POV-Ray提供制作成的高度精细的视频文件。超级计算机的使用可以提供更加高度精细的视频文件。并且,因为使用了POV-Ray,在UC-win/Road导出后脚本文件可以用editor等进行修正。 |
|
| ●UC-win/Road for Robot Arm
虚拟空间与现实空间里的机器臂相结合做动作。 | 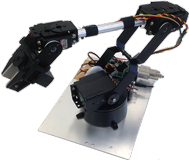 |
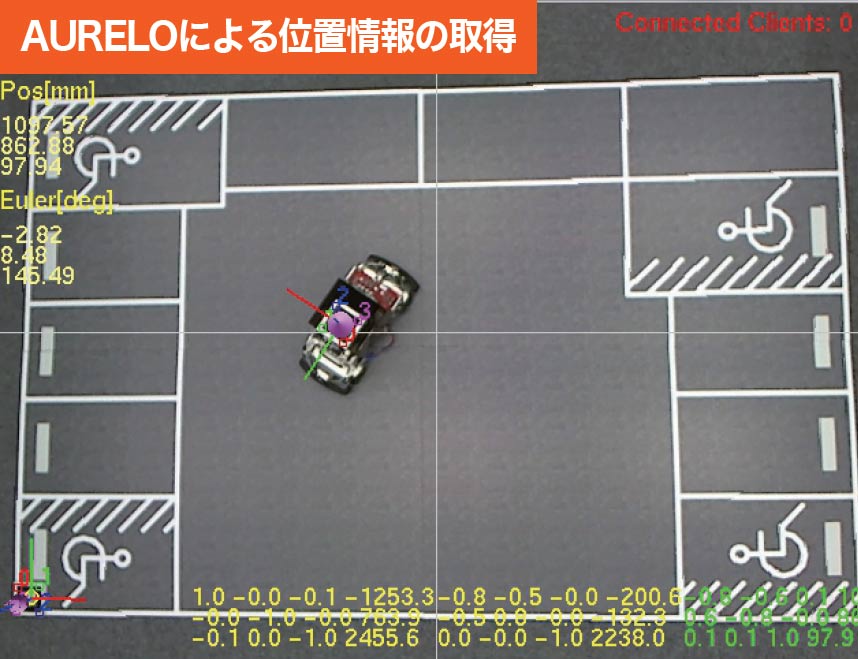
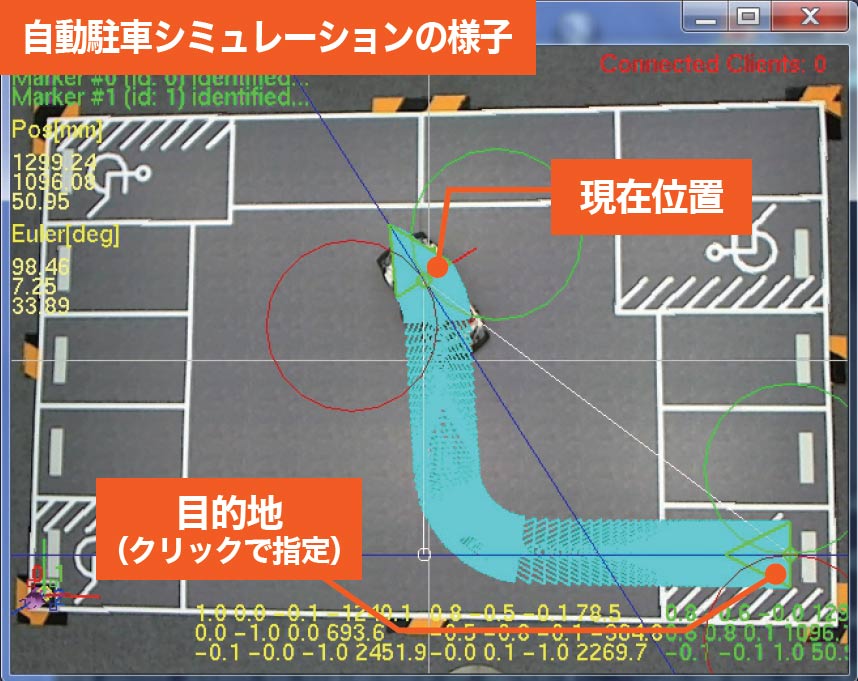
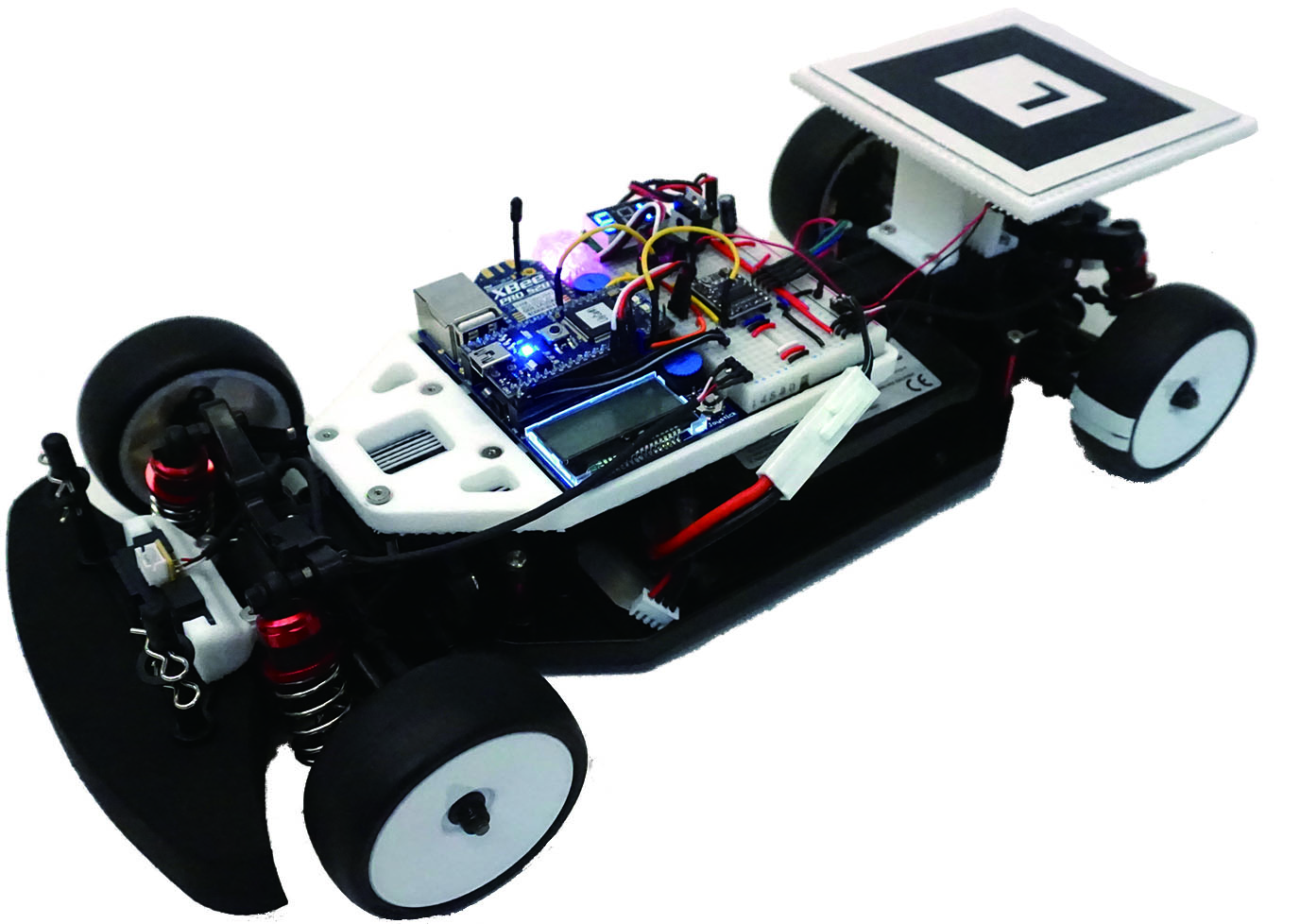
| ●Lily Car
与VR相结合的模型车自主行驶系统
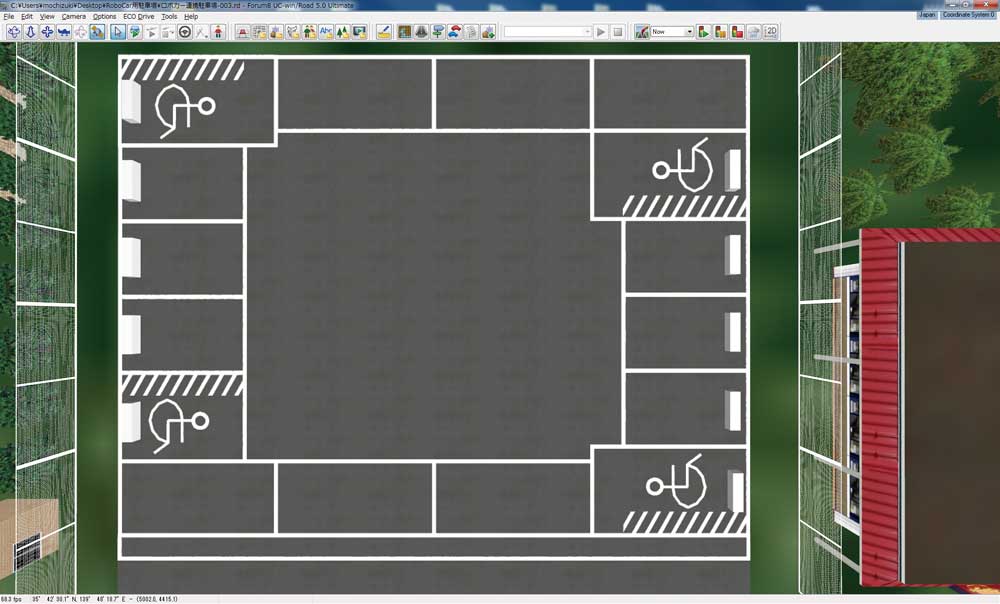
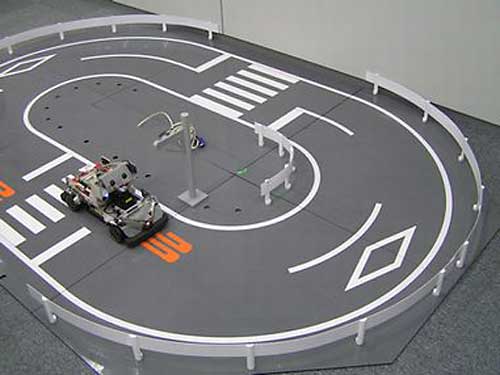
Lily Car是缩小的自主行驶模型车,将实车的举动在较小空间内模拟,对开发小型的自动驾驶车非常地有帮助。 让车在实现制定路径的实验场地上自主行驶。可以随时切换手动模式个自动驾驶模式,与电脑的控制界面和Aurelo系统连接,可以取得各车辆的位置与方向信息。并且,对车发送适当的指令的话就可以让它在所选的路径里行驶。
Lily Car系统结构
・1/10 RC Car的机体外壳 ・发动机 ・操舵电动机
・碰撞判定所使用的红外线感知器 ・车辆追踪用AR标记
・PC远程操作时用作交流和控制的无线模块。
・管理整个系统的主控制器。 |
|  |
|