プログラム概要
|
|
カーロボティクスプラットフォーム・スケールモデルカーRoboCar®と連携したリアルタイムVR-UC-win/Roadによるシミュレーションシステムです。
ドライビングシミュレーション機能が充実したバーチャルリアリティソフトUC-win/Roadとロボット技術を搭載したカーロボティクスプラットフォーム「RoboCar®」に連携させ、VR空間でのドライビングにより実車の1/10スケールモデルカーを模型道路上等で制御させるVRシミュレーションシステムです。
VRで表現された仮想実空間を利用できることで精緻な空間表現、多様な交通環境・シナリオを設定、試行できます。
自律走行などカーロボティクスの研究開発、先進安全自動車やITSの研究開発に活用できるシステムです。 |
|
■ プレスリリース
■ ムービー掲載
■ カーロボティクス+バーチャルリアリティ UC-win/Road for RoboCar®ムービー ('10.05.17掲載)
|
 |
・UC-win/Road for RoboCar® プレビュー |
|
|
・RoboCar®による “ステレオ画像認識による障害物回避“ |
|
|
・RoboCar®による “RoboVision ステレオ視による距離画像(車載)“ |
■ 新製品紹介
■ 開発中製品紹介
■ セミナー参加申込受付中
|
|
|
Page Top  |
プログラムの機能と特長
|
|
■RoboCar®とは
- ドライビングシミュレーション機能が充実したバーチャルリアリティソフトUC-win/Roadとロボット技術を搭載したカーロボティクスプラットフォーム「RoboCar®」に連携させ、VR空間でのドライビングにより実車の1/10スケールモデルカーを模型道路上等で制御させるVRシミュレーションシステムです。VRで表現された仮想実空間を利用できることで精緻な空間表現、多様な交通環境・シナリオを設定、試行できます。
 |
 |
 |
| ▲オフイス内を走行するRoboCar® |
▲RoboCar®の車両パフォーマンスを
設定できる |
■UC-win/RoadとRoboCar®の連携
- UC-win/Roadでは、精緻な空間表現、多様な交通環境・シナリオを設定でき、仮想空間を走行できます。一方RoboCar®では実車の10分の1のスケールモデルという特徴を持ち、現実空間が走行できます。これらの特徴を組み合わせることで、仮想空間では検証できない複合現実上でのシミュレーションが可能となります。
 |
|
 |
 |
|
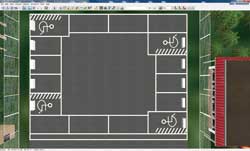
▲模型にて走行環境を作成し(上図)、
VR空間内でシミュレーション走行(下図) |
|
|
■利用シーン、用途事例
- カーロボティクスの研究開発
- 先進安全自動車やITSの研究開発
- 危険回避アシスト技術の研究
- 自動駐車の研究
- 自律走行アルゴリズムの研究
- 群制御
- インフラ協調の研究 など
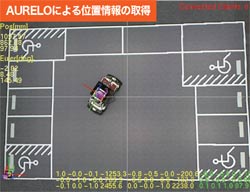
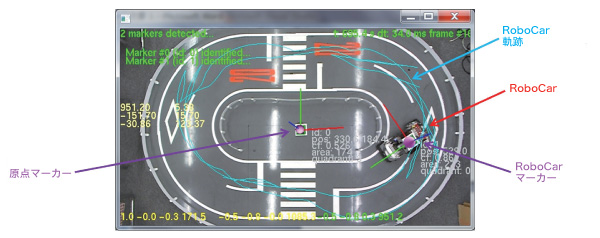
■ログ取得例
 |
|
 |
| ▲ログ画像 |
|
▲移動軌跡の算出 |
■多様な走行環境、インタラクション、シナリオ
- 天候や路面状況などの多様な走行環境の設定、走行時における、対向車や歩行者とのインタラクションやシナリオなどの設定が可能です。バック走行にも対応しています。
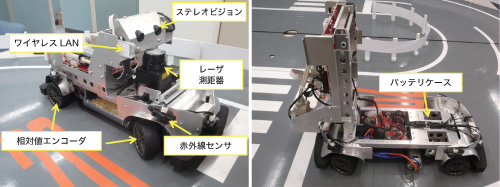
■UC-win/Road for RoboCar® Ver.2 AURELO (オレロ) 対応版
- 各車両と主モータの相対値エンコーダによるRoboCar®の位置と方向の測定機能
- レーザー測距器、赤外線センサ、ステレオカメラによる最接近障害物との距離計測、自律ナビゲーションの既知パターン識別
- ワイヤレスLANアダプタによるRoboCar®へのリモートアクセス
- 加速度計、Gyro
- 温度センサ
 |
|
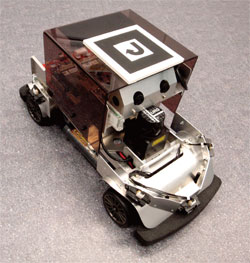
| ▲RoboCar® |
▲AURELO上面ビュー |
■提案システム
- 赤外線深度センサによる車輌制御と運転操作イメージ
UC-win/Roadと連携により、Kinect(TM)の前で仮想ハンドルを握って両手を動かすことでVR空間での運転操作が行えるシステム。Kinect(TM)が検出したドライバーの両手の位置情報を車のステアリング、アクセル、ブレーキに変換する。
 |
|
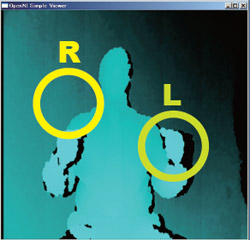 |
| ▲ステアリング操作(右折・左折) |
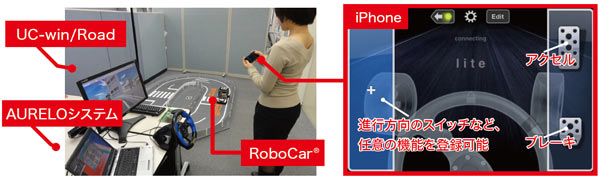
- 6軸モーションセンサによるドライビングシミュレーション
iPhoneの6軸モーションセンサを利用し、UC-win/Roadでの運転走行操作が可能。
UC-win/Roadとの連携でiPhoneによるRoboCar®の操作も行える。iPhoneを回転させてステアリング操作を行い、アクセルとブレーキの操作は画面内のボタンをタッチして行う。
 |
 |
| ▲RoboCar® |
▲本体レイアウトイメージ |
■充実した環境認識プラットホーム
- ステレオ画像処理モジュール
ステレオカメラと画像処理ボードをスケールモデルカー本体に搭載し、リアルタイムで画像処理を実行します。自律移動システムのアルゴリズムを研究室内で検証可能です。
- 赤外線測距センサー
障害物検知や駐車サポート等に利用できる赤外線測距センサーを搭載します。
センサーは車体の前後、側面の取付バーを用いて、ユーザ自身で自由に設定可能です。
- 小型レーザレンジファインダー
オプションで小型レーザレンジファインダーを取付可能です。
本格的な自律制御システムの研究用途に最適です。
■スケールモデル電気自動車
- 電気自動車システム
ECU(電子制御ユニット)としてのメインコントローラからモータドライバー,駆動用モータおよびステアリング用サーボモータを制御し、電気自動車としてのシステムを提供します。
- 無線通信を利用したリモートコントロール
WiFi通信モジュールを搭載し、PCやリモートコントローラから遠隔でスケールモデルカーを操作することができます。人間の直接操作が必要な研究や教育に活用できます。
■使用例
-
障害物回避
アルゴリズム検証 |
 |
自動運転の研究 |
 |
|
|
|
| Page Top |
UC-win/Road RoboCar® Auto parking plugin
|
|
UC-win/RoadとRoboCar®の連携により、カメラ画像や超音波センサの情報を元に、駐車時のステアリング操作を車が自動で行うシステムです。ドライバーが車外でボタンを押すだけで、車が駐車操作をすべて自動で行います。
RoboCar®による自動駐車システム
- UC-win/Roadのモデルと同期し、自動駐車の様子についてVRで確認可能
- 任意の地点から、指定の駐車枠へ車庫入れ・縦列駐車を自動で行える自動駐車システム
- UC-win/Roadで作成したVRを用いて現実と同じような駐車場を簡単に再現可能
- 自由に視点を変更できるので、さまざまな方向から自動駐車の様子を確認できる
- AI(人工知能:Artificial Intelligence)による経路の探索・決定
・経路のずれが生じた際には直ちにルートを修正
・複数のルートから効率のよいルートを選択
・ルート上の障害物を回避したり、その際に新しいルートを探索
- RoboCar®の位置情報はAURELO(拡張現実位置決定システム:AUgmented REality
LOcalization system)の位置・方位情報を使い、駐車目標地点は自動駐車システムの持つ駐車場の地図をベースとする
開発予定
- RoboCar®内部へ制御システムを搭載予定。AURELOからの情報取得、経路探索・決定を行うほか、ステレオカメラなどのセンサ情報をもとに自身で駐車可能なスペースを探索するなど、より現実に近い自動駐車を実装予定。
 |
| ▲RoboCar®自動駐車システム概要 |
|
|
| Page Top |
.gif)
.gif)