真正意義上的四輪真實型駕駛模擬器套裝軟體系統 |
|
完全控制環境下的綜合駕駛環境。可反復再現。
近年來駕駛模擬器被廣泛應用於車輛開發,ITS交通系統研究,駕駛員,車輛,道路和交通間的相互作用的研究等諸多領域。
·通過UC-win/Road作成自由的三維駕駛環境
·通過套裝軟體提供標準插件
·承接展示會、講習會等短期使用的租賃服務
·通過描繪選項再現豐富多彩的環境
·通過車輛本體的批量OEM實現低價格
·通過用戶自定義滿足高度的模擬需求 |
 |
|
|
Page
Top  |

駕駛模擬器再現了高速公路上的危險駕駛場景 |
|
模擬器主要採用的是富士重工業航空宇宙部門的飛行模擬器技術以及
SUBARU汽車部門的技術相融合而成的電動6軸運動平台(專利)、在結合SUBARU技術開發的駕駛模擬器。該駕駛模擬器的方向盤等構件均採用了實車部件,真實得再現了實際駕車的感覺。 |
 |
|
| Page
Top |

對應6自由度0.7G運動平台的高度研究用駕駛模擬器 |
|
F0RUM8於2012年3月22向九州大學綜合新領域學府正式交付「高度研究用駕駛模擬器資訊利用型人-車-交通流相互作用型模擬系統」。

九州大學引進高度研究用駕駛模擬器
本模擬器是通過UC-wm/Road進行集成,將駕駛模擬器、交通流模擬器、車輛運動模擬器、HILS/ECU仿真器、視線計測裝置等相連接的駕駛模擬系統。
2012年5月13日在伊都校區召開的紀念九州大學11周年『九大百年校慶』中,作為研究
公開及參觀對象之一進行了一般公開、試乘體驗等。試乘會以親友相邀為中心排起了長隊,模擬器的體驗區非常人氣,共計116名人士體驗了駕駛模擬器。
試乘賽道是從本公司福岡營業所附近(大博通)開始,到博多站為終點的約2分鐘內 容,『豐富逼真地表現,圖像也非常流暢美觀』等,獲得許多好評。
此外,FORUM8還於2012年3月向精度大學大學院工學院工學研究科交付了高度研究用 駕駛模擬器(六自由度5通道)。
 |
 |
 |
 |
▲資訊利用型人-汽車-交通流相互作用系駕駛模擬器參觀
(2012年3月23日/於:九州大學) |
|
|
|
| Page
Top |

8DOF交通安全模擬器 Traffic Safety Simulator |
|
本駕駛模擬器是以三維虛擬實境UC-win/Road為基礎的高性能大型駕駛模擬器。
此模擬器中國交通運輸部計劃用於交通安全研究。由交通運輸部公路科學研究院負責技術規格的部分的編寫和構築。
在2009年1月的國際招標中FORUM8公司單獨中標,系統最終於2014年2月完成驗收。
|
|
| Page
Top |
 |
|
- 超大型DS系統:由6軸+
Yaw・軸以及全周8台投影集群構成
- UC-win/Road
汽車模擬器
- UC-win/Road
輪椅模擬器
- UC-win/Road
鐵路模擬器
- UC-win/Road
駕駛設備設定位置探討系統
- UC-win/Road
船舶駕駛模擬器
- 施工機械人機界面
細分化組件實現高度柔軟低成本的開發
●組件的變更/追加變得更加容易(駕駛模擬系統)
UC-win/Road車輛模型的變更,用戶硬體的變更和駕駛狀況的記錄輸出等的客製化開發事例等。使用從前的組件構成(右圖、去除追加事例)從通常的遊戲方向盤當中取得腳踏板和方向盤的操作量資料,計算車輛的運動。並且,還可進行與車輛的加速度和軌道獨立組件的計算,因此可進行車輛的引擎運動模型的客製化,路面和輪胎的粘著模型的需求對應。追加了「模擬踏板裝置輸入」和「踏板操作輸入切換」等組件,實現了遊戲控制器與其他硬體的共存及對應模擬裝備。最後,通過「日誌的取得和保存」及追加組件,可獲得或輸出駕駛模擬系統相關資訊。
VR-Studio®中開發中的高度化功能及新功能的使用
●新組件的開發/開發中產品的預取
為
實現客製化新功能的開發,我們獨自開發基本技術,進行廣發的套裝軟體新功能的設計與開發。駕駛模擬的場景功能為顧客的專門技術的研發等提供幫助。並且,在
場景功能中,通過打開事件,可測量駕駛員反映,進行駕駛模擬。並且,使用最新電腦圖繪技術,使用Shaders言語,積極開發地形材質處理和光源高度表現
等技術。
與硬體結合實現高度模擬
●UC-win/Road駕駛模擬器運動平台
產品與硬體連接也可進行UC-win/Road駕駛模擬器的客製化等。「運動平台可實現更加現實的系統。DS的開發實例中,有汽車開發,安全系統開發,訓練
模擬器,廣告用模擬器及鐵路模擬器等。與硬體連接不但可以發揮不可或缺的即時三維VR的特長,也可生成柔軟的3D空間,變更,場景和事件的控制等也可自由進行,因此可對應各種模擬需求。 |
|
| Page
Top |
 |
●MR :
Mixed Reality - 混合現實感 ●AR : Augmented Reality - 拓張現實感
大阪都市模型和VR連接系統
Development of a
City Presentation Method by Linking a Viewpoint Between Physical Model
and VR
|
|
 |
| Associate
Prof. Tomohiro Fukuda (大阪大學研究生院、日本 ) |
|
| 大阪・中之島的1/300範圍的模型和VR模型連接,模型使用雷射指針進行指示,
並使用感測器讀取之後再在VR中表示。並與原型的演示結合,把模型和VR的優點結合進行介紹。 |
|
澀谷交叉口群集模型與交互性設備
Development of
Linking System for VR and Interactive Devices
|
|
 |
Mr.
Taro Narahara (哈佛大學大學院、美國)
|
|
| 將實際捕捉到的人物動作導入模型,可逼真地在UC-win/Road中進行項目再現。此次,通過將該技術與本公司的插件共同開發,實現模擬和UC-win/Road的即時連接,Mr. Narahara對即時的交互式結構進行了說明。 |
 |
|
 |
| ▲IVR展(2011年)展位 |
|
▲第3屆 國際VR研討會發表的樣子 |
|
| Face Mount 系統 |
Up&Coming > > 硬體資訊 >> Face Mount系統 <No.65
'07 新春特別號 刊載>
感測器和眼罩在UC-
win/Road中進行接續,從各種感測器中讀取的複數號誌可正確計算頭部的活動,眼罩表示部可在VR空間中表示。
駕駛模擬系統和展示系統接續並進行利用時,與通常的顯示器相比構築更具現實感的VR模擬器。
|
■感測器 |
■眼罩
|
POLHEMUS
社制
使用PATRIOT(6軸資訊取得)磁界發生源感測器和控制磁界發生源計算6軸資訊算出位置。 |
VUZIX
社製
iWear VR920 |
|
|
| 3D立體系統 裸眼立體映像系統 |
3D
立體視圖系統構築例 無需眼鏡的立體映像。實現西洋鏡和立體映像的合成。
■什麼是3D-B-Vision?
3D-B-Vision是指混合
顯示/擴張現實(Mixed Reality, MR/Augmented
Reality.AR),硬體系統。利用在現實空間(物理空間)重疊顯示數字資訊的功能AR正在成為普遍的技術。
3D-B-Vision正是實現了數字資訊的3D立體CG的格式的顯示。該資訊能夠顯示在建築模型以及
模型等其他的物理對象物上。系統只需將2個小型投影儀按照兩眼距離隔開設定即可實現3D立
體顯示效果,不需要專門的眼鏡。用戶可以通過透明視窗確認對象物體。並且使用overhead的 silver
screen設定3D立體圖片並立刻確認。3D-B-Vision的立體投影,結合汽車,步行者和其他 動作的對象物可以實現高效的演示。
■優點
・利用UC-win/Road可以在3D立體顯示中使用即時模擬資訊。
・無需偏光眼鏡雖然有些取決於對象物大小,但很多可以結合各種資訊使用,如KIOSK(廣告塔) (即時運行的資料打造對象物強烈的視覺效果)
開發 :(有)石川光學造形研究所 http://www.holoart.co.jp/
 |
 |
|
▲普通的3D立體系統圖
|
|
|
| Page
Top |

汽車機器人開發平台與虛擬實境空間的融合 |
|
UC-win/Road可在短時間內通過簡單操作製作大規模虛擬實境的空間。與RoboCar
®的連接可使不單只製作VR,還可製作複合的模擬器。因此可期待更加廣泛的模擬器的使用。
■RoboCar®是什麼?
RoboCar®是駕駛模擬器功能豐富的虛擬實境軟體UC-win/Road與搭載機器人技術
的汽車機器人開發平台「RoboCar®」連接,可在VR空間進行駕駛,實現規模為實車11分之一的小比例模型,可在現實空間內行駛系統。可利用VR中的虛擬空間的表現實現精緻的空間表現,並設定多樣的交通環境和場景的設定,試行。
■UC-win/Road和RoboCar®的連接
在UC-win/Road中可以表現精緻逼真的空間,設定豐富的交通環境與場景,並在虛擬空間中進行行駛。RoboCar®的特點是規模為實車11分之一
的小比例模型,可在現實空間內行駛。通過組合這些特徵,可實現在虛擬實境環境中無法驗證的複合現實的模擬。
  |
|
| ▲在模型內製作行駛環境
(左)、在VR空間內進行虛擬行駛(右圖) |
|
|
| Page
Top |

停車場解決方案 |
|
FORUM8公司提供各種解決方案,如將車輛軌跡圖製作/停車場/設計CAD與UC-
win/Road連接實現停車場模型製作、VR模擬,與RoboCar®同步實現自動泊車系統、基於VR-Cloud®的停車場檢索與導航系統等。 |
|
 |
|
| Page
Top |

車輛軌跡製圖/停車場設計/自動停車系統綜合解決方案 |
|
車輛軌跡圖製作以及停車場製圖/設計CAD連接實現3D/VR模擬。
並將其VR模型與RoboCar同步實現自動停車系統。車輛軌跡製圖系統 |
|
- 車輛軌跡製圖系統
本程序是基於【半拖車及全拖車的直角旋回軌跡圖的樣式(JASO Z 006-92)】等製圖理論的車輛行駛軌跡計算‧製圖系統。利用本系統可以高效完成針對假設路線,現有路線的行駛模擬、車輛軌跡、車輛詳細狀製圖。
- 停車場製圖系統
基於《標準停車場條例、道踣構造令》等製圖理論支援符合停車場規範的停車場設計CAD系統。
製作完成的停車場圖紙輸出為CAD資料在《車輛軌跡製圖系統》中使用。
- UC-win/Road
RoboCar® Auto parking plugin
連接UC-win/Road與RoboCar,以攝像頭圖像與超音波感應器資訊為基礎實現泊車時的方向盤自動操作系統。駕駛員在車外按下按鈕,車輛將自動完成停車操作。
|
|
| Page
Top |

Parking Solution VR-Cloud®
Parking NAVI |
|
VR-Cloud® Parking
NAVI可實現使用智慧型手機等的網路移動終端實現停車場預約的系統。可為停車人節省在相對擁擠的城市部找尋停車場等的時間。並且,對於停車場運營商來說也提高了使用效率。預約完成之後的停車場可使用VR-Cloud®等進行路線導航。因為停車場已經建構好VR模型,因此無需另準備地圖資訊。另外,還可根據需要進行2D表示或文本資訊表示。
|
|
| Page
Top |

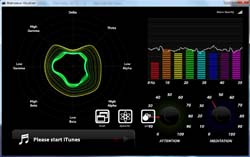
姿勢駕駛模擬 |
●Mind&VR UC-win/Road for
MindSet
計測腦活動的Mindset與VR的連接
無手把控制的研究
|
NeuroSky
的MindSet是可計測腦活動的無手把Bluetooth藍牙頭戴式耳機(EEG)。左
側的耳機中通過3個電極和用戶前方頭部的1個電極可以記錄表示腦部活動特性的EEG號誌。分析EEG號誌,可在號誌組件中抽出Meditation係數和Attention係數2個參數。使用者放鬆時Meditation係數增高,集中
注意某特定事項時Attention係數增高。
 |
 |
| ▲MindSet設備
(Neurosky) |
▲“腦波可視化儀”
(Neurosky) |
|
|
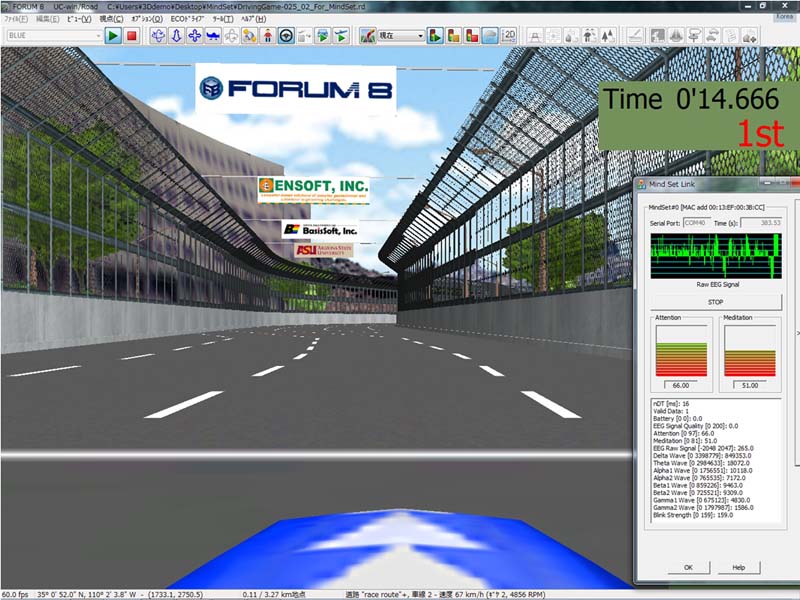
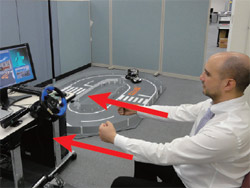
應用事例:F1賽道 |
作為EEG技術應用事例列舉了F1賽道。即時(@60Hz)讀取2套MindSet設備,開發了可抽出Meditation和Attention係數的接口。這是在美國亞利桑那州費尼克斯召開的F1賽道的虛擬實境資料。通過起服務器作用的
接口工具,2個玩家可在分別的電腦上進行賽道駕駛。車輛的加速由Attention係數控制,構成上使用者集中注意力便會加速。FORUM8對應應用腦波等身體資訊的研究系統進行提案。
 |
 |
| ▲費尼克斯F1線路 |
▲同時具備遊戲性,作為展示系統獲得好評 |
|
|
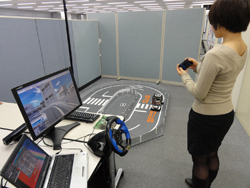
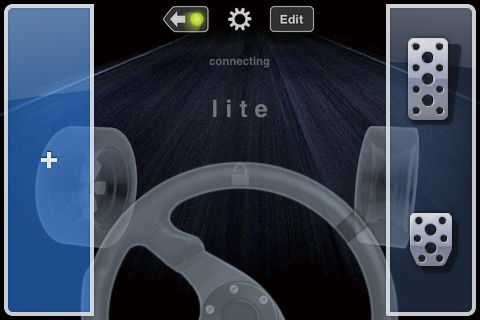
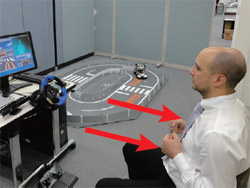
●Kinect™駕駛模擬器
通過紅外線深度感測器
進行UC-win/Road駕駛操作的系統
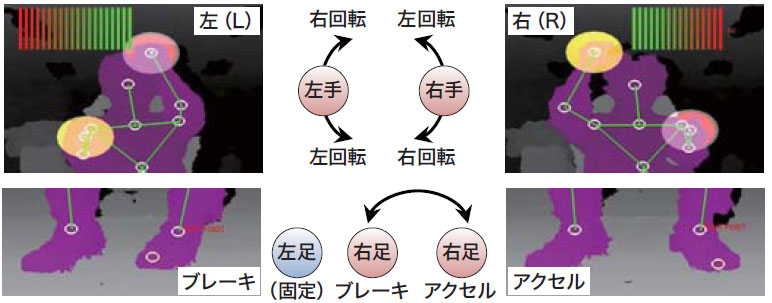
在Kinect前面像操舵操作一樣進行UC-win/Road駕駛操作的系統。Kinect™檢出的駕駛員兩手的位置資訊轉換為車輛的操舵,油門,煞車。
通過紅外線深度感測器進行車輛控制盒駕駛操作的示意
在Kinect前面像操舵操作一樣進行UC-win/Road駕駛操作的系統。Kinect™檢出的駕駛員兩手的位置資訊轉換為車輛
的操舵,油門,煞車。
 |
|
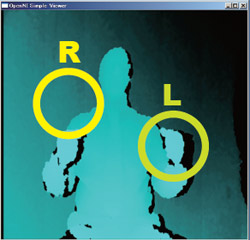 |
| ▲方向盤(右轉彎・左轉彎) |
 |
|
 |
| ▲加速操作 |
|
▲煞車操作
|
|
|
| Page
Top |

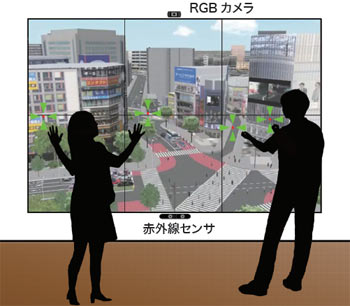
6K多集群數字標牌系統 |
|
利用紅外線深度感應器的多畫面數字標牌系統
多畫面6K顯示器和利用紅外線深度感測器的互動操作(雙向)數字標牌系統。利用手勢、動作可進行直觀操作。
 |
 |
▲6K數字標牌AirDriving
(東京遊戲節2011) |
▲AirDriving界面 |
 |
|
 |
| ▲6畫面多數字標牌系統 |
|
▲表示示意圖 |
 |
|
新型解決方案服務 「超級電腦雲端®」
應用超級電腦才具有的高速演算性能提供全新解決方案 |
「超級電腦雲端® CG影片服務」是提供POV-Ray製作高精細的動畫文件。
並且,因為使用POV-Ray可在編輯器中編輯UC-win/Road中的文本文件。 |
|
|
| Page
Top |

使用機器人的最新技術解決方案 |
|
UC-win/Road
Air Driving 應用技術
無需控制設備實現細緻、高精度的駕駛操作。
|
| ▲使用6畫面多集群數字標牌系統的無手駕駛模擬) |
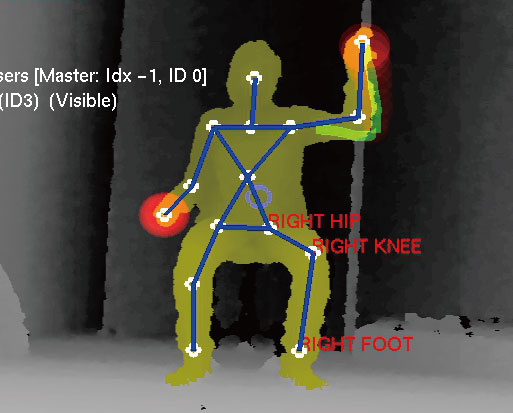
骨架識別
紅外線深度感應器通過距離資訊檢測出同一物體來識別人體特徵。採取特定的舉動時會進行校正識別骨架結構。
 |
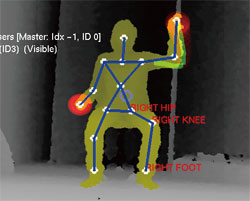 |
| ▲校準姿勢(左)、認識結果(右) |
| Kinect(TM)感測器 |
XtionPRO |
 |
 |
|
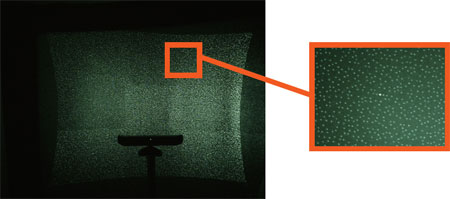
▲紅外線深度感測器(Kinect™、XtionPRO)
▲Kinect™紅外線深度感測器
UC-win/Road
RoboCar® Auto parking plugin
連接
UC-win/Road與RoboCar®連接,以攝像頭圖像與超音波感應器資訊為基礎實現泊車時的方向盤自動操作系統。駕駛員在車外按下按鈕,車輛將自動完成停車操作。
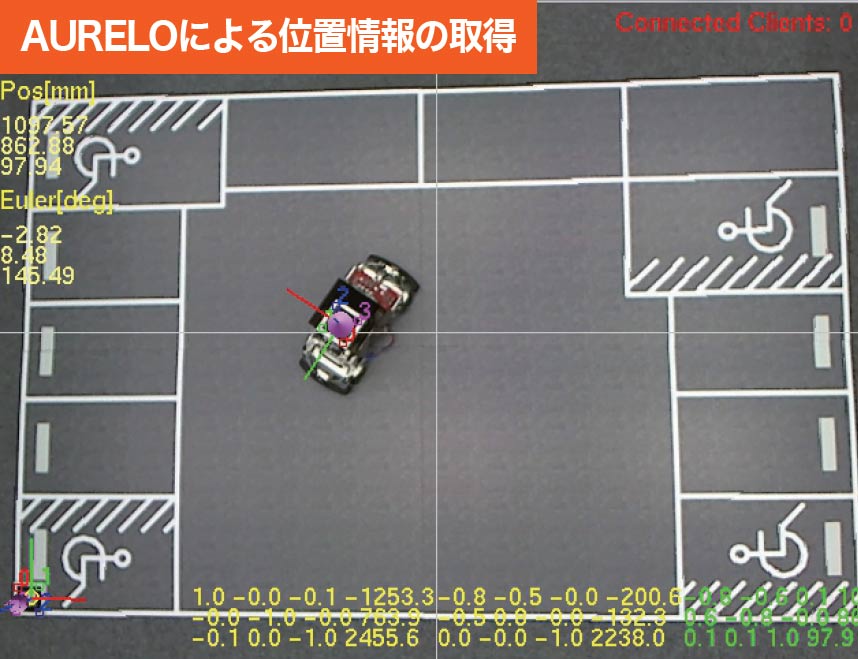
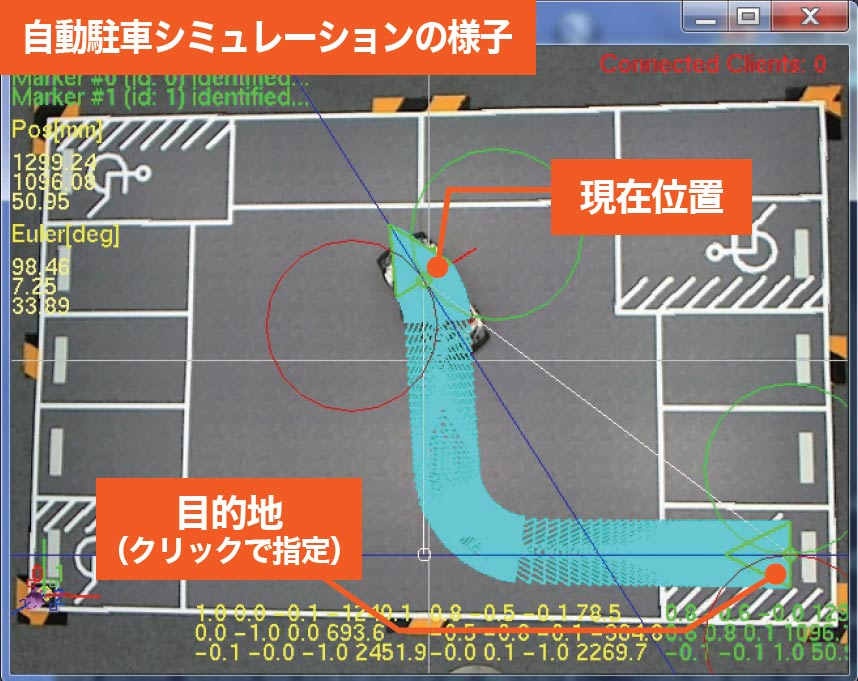
■通過與UC-win/Road同步在VR環境中確認自動泊車情況
■通過AI(人工知能:Artificial Intelligence)檢索和設定路徑
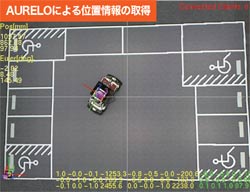
■RoboCar® 位置資訊使用的是AUREL0 (擴張現實位置決定系統:AUgmentedREality Localization
system)位置、方位資訊,停車目標地點以自動停車系統具有的停車場地圖為基礎。
開發計劃
■在RoboCar®內部搭載控制系統
計劃在RoboCar®內部嵌入控制系統以外還將開發從AUREL獲取資訊後檢索和決定路徑的功能、立體攝像頭等感應器資訊為基礎檢索停車
位等接近現實的自動停車功能。
 |
 |
 |
| ▲使用AURELO的
RoboCar®自動停車模擬 |
 |
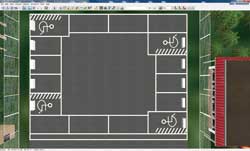 |
| ▲ 在UC
-win/Road上確認自動停車 |
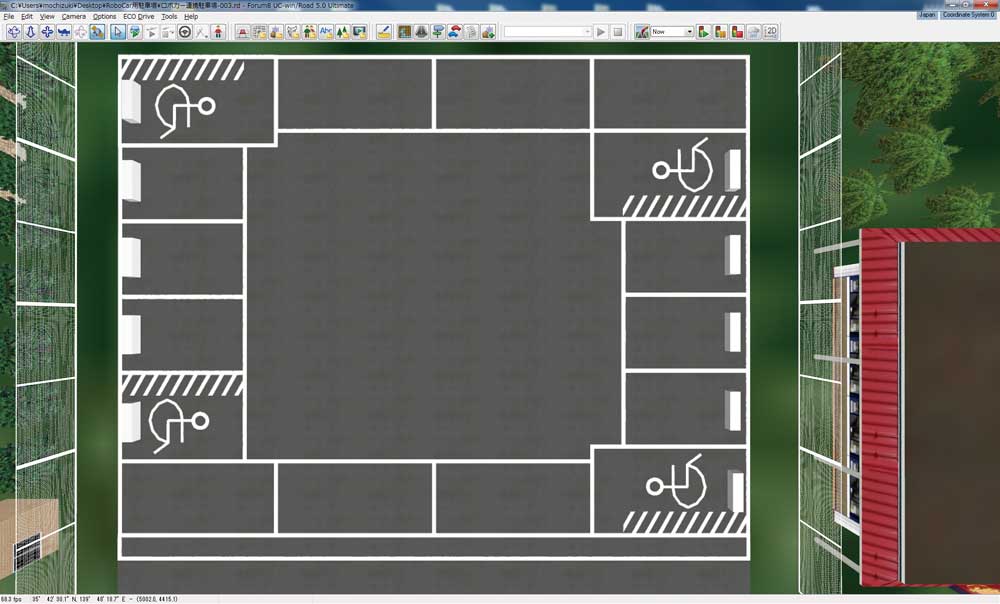
▲停車場的VR標線。
可從任意的視點對停車場進行確認 |
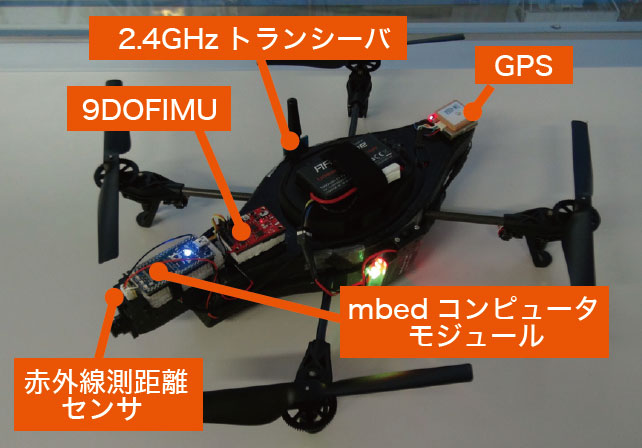
AGUL AR.Drone
運用AR_Drone二次開發系統的遠程農地管理項目
AGUL是農業支援為目的對AR.Drone(Parrot公司)二次開發的系統。使用照相機、溫度感測器、濕度感測器,通過從上空收集資訊,進行農作物生長發育情況、病蟲害 情況的確認。支援農田的管理。從搭載的照相機可即時地對周圍映像進行送信,克服了障礙物,在家中也可實現操控。
■通過鼠標、鍵盤進行操作通信資訊等資料利用Wi-Fi進行無線傳輸
■通過內置電腦自動控制平衡。上升、下降、前後左右的移動等高難度動作可簡單實現
■使用前置照相機、高速照相機確認,可通過FLY-DV照相機進行詳細記錄
■通過GPS測定AR.Drone的位置
■通過9D0F IMU (軸慣性計測裝置/Inertial Measurement
Unit),測定加速度、陀螺儀、地磁氣,確認AR.Drone的方向
■通過紅外線測距感測器避難與障礙物發生衝突
|
|
| Page
Top |

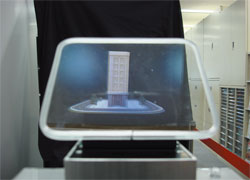
通過模型《VR的連接進行模擬/演示的系統連攜 |
|
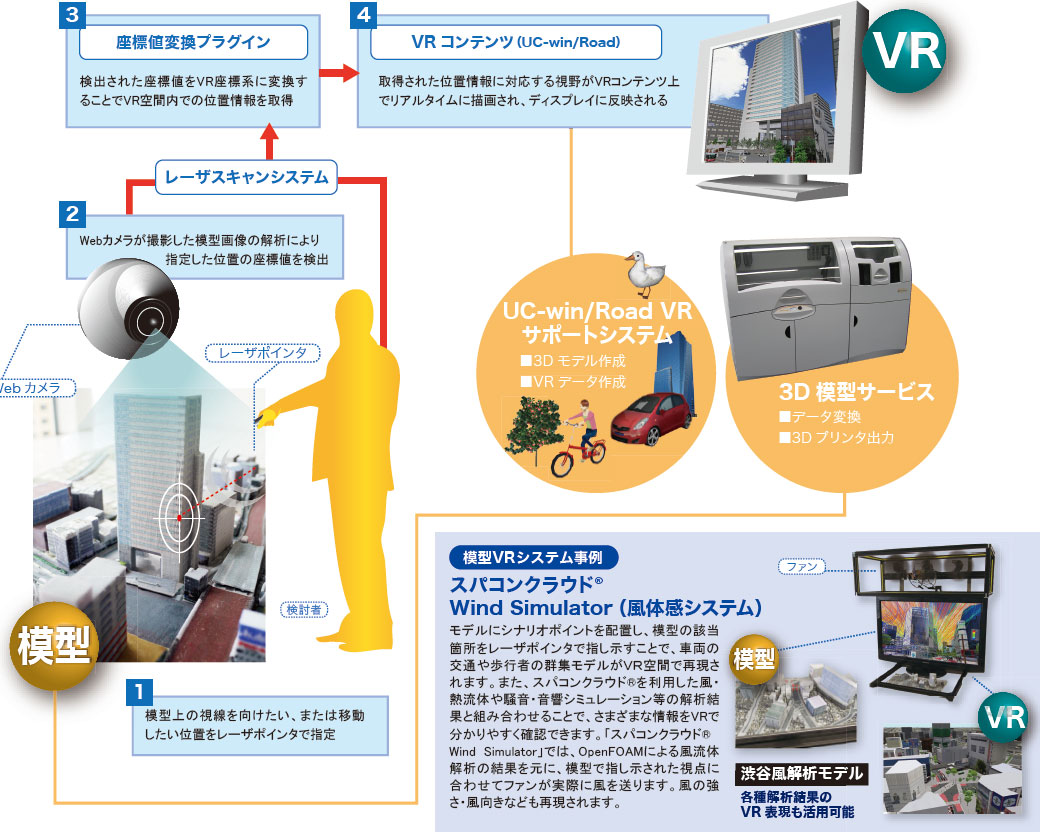
[UC-win/Road模型VR系統]由W16成員之一的大阪大學大學院福田知弘准教授的想法和技術協力開發而成。將模型和VR的視野資訊連接,通過提供一體化操作環境技術,將雙方的長處結合形成的新型模擬演示系統。在專址性和知識水平方面,對於各類相關人員可淺顯易懂地傳遞資訊,高效推進規劃討論和共識達成。
詳細 >> UC-win/Road模型VR系統(Up&
Coming
'11 新春號刊載)
| 技術協力: 大阪大學環境資源工學專攻、福田知弘 副教授 |
■模型和VR長處結合的討論工具
VR的長處:高度的靈活性和表現力,在交通流的表現、天氣條件的變更等可進行模型無法實現的各類討論。
模型的長處:距離、規模等在規劃整體把握方面,模型更有直感。並且,多人可同時從任意視點進行討論,便於一次性把握城市整體,討論者可以直接接觸也是模型的長處所在。
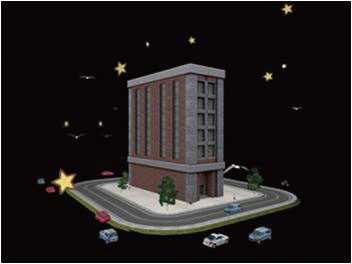
■模型上指定希望討論的視點在VR上描繪
與VR單體相比更加直觀,規劃討論時更加容易操作。使用雷射指針通過在模型上指明希望討論的視點,可在VR空間內移動及變更視線方向。系統由模型、Web照相機、雷射指針、VR軟體[UC-win/Road],顯示VR空間的播放器構成,通過雷射指針的操作檢測出位置,並將檢出到的資訊傳 遞給UC-win/Road最終反應到VR空間。
■[中目黑安全安心地圖]模型VR系統在展示廳中展示
使用了FORUM8本社所在地中目黑地區模型的提案系統。模型和VR—體化作為[地域的安全安心地圖],還可確認地下的基礎設施治理狀況、大樓內部空間等,可用於城市二次開發、城市治理中達成共識等目的。
■系統提案及預算
F0RUM8根據客戶的需求準備了
UC-win/Road模型VR系統的提案及預算。此外,利用UC-win/Road支援系統,還可根據客戶的需求製作3DVR模擬資料。製作的VR資料
如果應用於[3D模型服務],UC-win/Road的VR資料可通過3D列印機段時間內輸出實物模型,由此可高效地構築模型VR系統。
| 見積例:「中目黑安全安心地
圖」模型VR系統 |
使用了FORUM8本社所在地中目黑地區模型的提案系統。模型和VR—體化作為[地域的安全安心地圖],還可確認地下的基礎設施治理狀況、大樓內部空間等,可用於城市二次開發、城市治理中達成共識等目的。
■製作VR資料 : 約270萬日元
■製作3D模型:約350萬日元
※包含購買ARToolKit、Web照相機、雷射指針、台式電腦、42寸顯示器、UC-win/Road Advanced 1套、
UC-win/Road二次開發、技術諮詢等
合計 \11,600,000
 |
 |
 |
▲「中目黑安全安心地圖」
VR模型全景 |
▲中目黑車站前 |
▲目黑銀座商店街 |
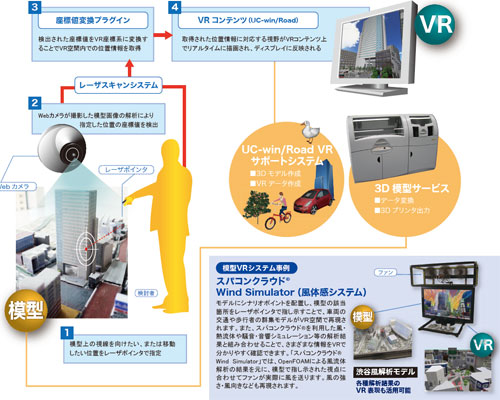 |
| ▲系統構成概要 |
|
|
|
| Page
Top |

建築空間和映像的融合及應用VR的投影討論 |
|
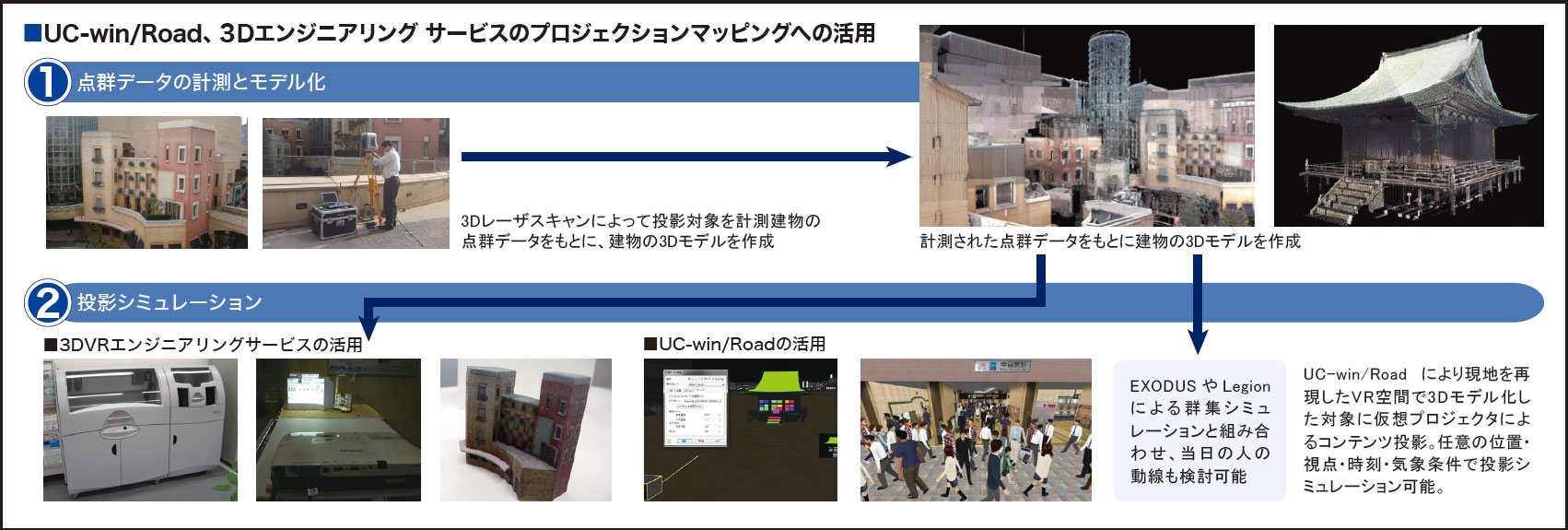
FORUM8公司提供三維投影映射等利用三維資料以及映像的最先進的空間表現服務。
3D投影映射 <
Up&Coming No.96 '12 春號>
3D投影映射
(2) <Up&Coming No.97 '12 夏號>
投影映射是對建築物、車、家具等實物(立體結構物)通過利用投影 儀直接投影的新型映像表現。在歐洲作為音樂會、紀念活動、廣告、
城市景觀的照明,還廣泛應用於吸引觀光遊客。從紀念活動的客戶邀請到店鋪演出、增強地域活性化,對應各種使用目的。
■投影映射的製作日程表

※日程表根據內容不同會有所調整 |
通過應用UC-win/Road、3D工程服務的投影模擬,可事前確認比例尺模型、VR資料的效果。對內容的討論、確認、會晤、面向甲方的說明,還可利用
於活動的事前、事後展示宣傳。
計劃案例
- 位置:屋外、環境光較少的暗處、投影、設定都不會對交通、近鄰產生影響的私有用地
- 投影對象:塔狀建築物,簡單的立方體構成
- 建築物尺寸:W11m x D6m x H20m
- 建築物材質:磚(茶色/非光澤)
- 投影位置數:最大從2個位置投影
- 投影距離:約15m(A附近)約40m(B遠處)
■11000/20000流明映像投影儀進行的投影計劃
11000流明與20000流明比較亮度,面積都會變少。磚質對象的標準推薦是20000流明。
 |
| ▲2台構成 |
■模型投影計劃一覽(2D,3D內容)
※音響費用:模型投影中音響器材和音響內容的合計約110萬日圓已含。
※包含3D動畫內容+音響
| 器材構成 |
投影儀1台 |
投影儀2台 |
| 11000
流明映像投影儀 |
515萬円 |
711萬円 |
20000 流明映像投影儀
|
575萬円 |
820萬円 |
- 作品長度約3分鐘,映像、音響(附選曲、MA)
- 映像音響器材租賃期間3天 (準備1天/正式使用2天)
- 含現場測試。
- 含企劃(進行製作管理)
- 含器材搬運、設營、調整。
- 含操作人員、映像音響技術人員。
- 外地交通費、住宿費另計。
- 不含架台製作費、吊車利用費等。
|
|
| Page Top
|

BIM/CIM&VR的綜合解決方案 |
|
BIM/CIM在建築、土木中追求將各類資訊綜合到模型,並對其資訊製作、管理和應用。從設計、施工、維護管理作為1個模型來考慮,除2D3D圖紙製作外,包含
材料規格、數量、概算施工費、管理資訊等,通過將所有資訊統一管理,可對建築物、結構物的生命週期所需的全部資訊進行連續設計和表現。此外,通過對各類解析、VR的解析結果可視化模擬等在內,作為土木建築行業全新的商業模式,
FORUM8致力於『IM&VR解決方案』的推廣。
詳細 >> IM&VR
|
|
| Page
Top |

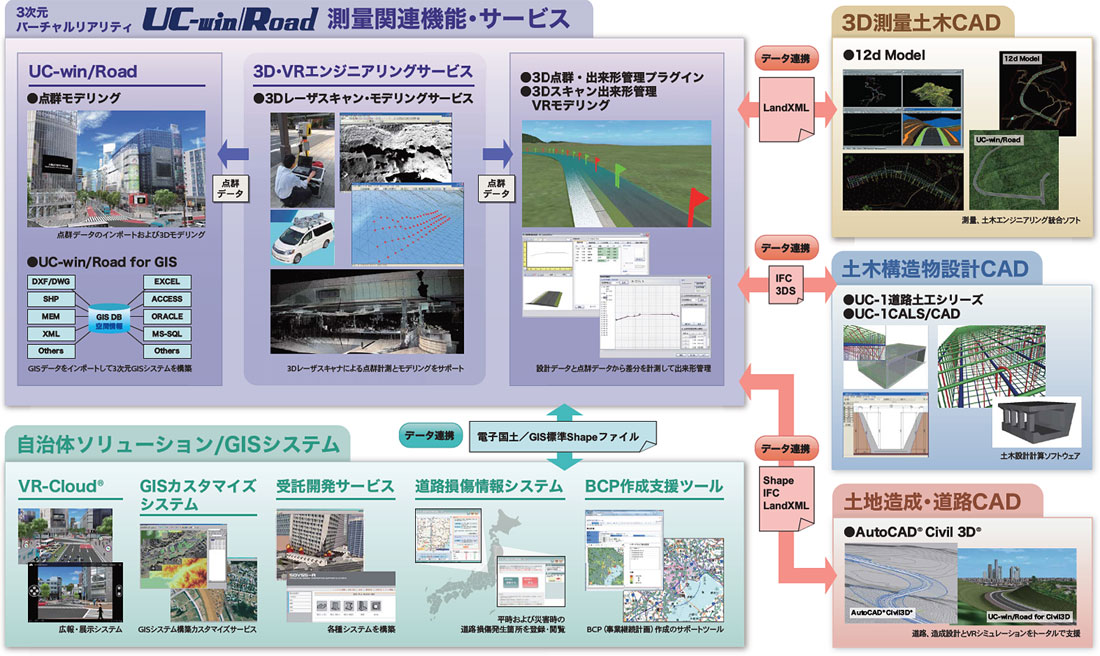
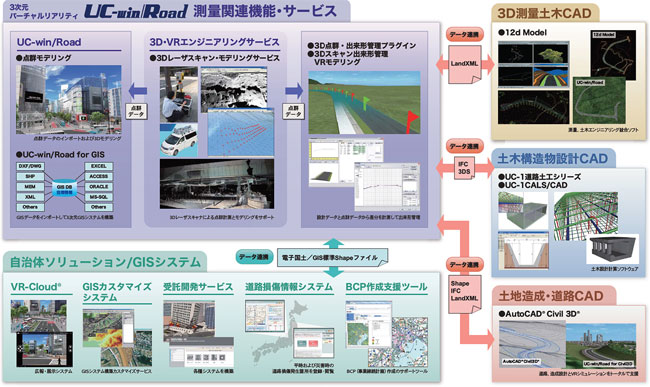
GIS/3D鐳射掃描/3D測量土木綜合解決方案 |
|
使用3D鐳射掃描進行點雲計測とUC-win/Road中的點雲資料的VR模型等。我們提供
3D測量CAD ・土木構造物設計CAD與VR進行資料交換,GIS和VR連接進行系統構築等,提供綜合測量解決方案。
 |
|
| Page
Top |
|
|