| システムコンポーネント |
| 1 |
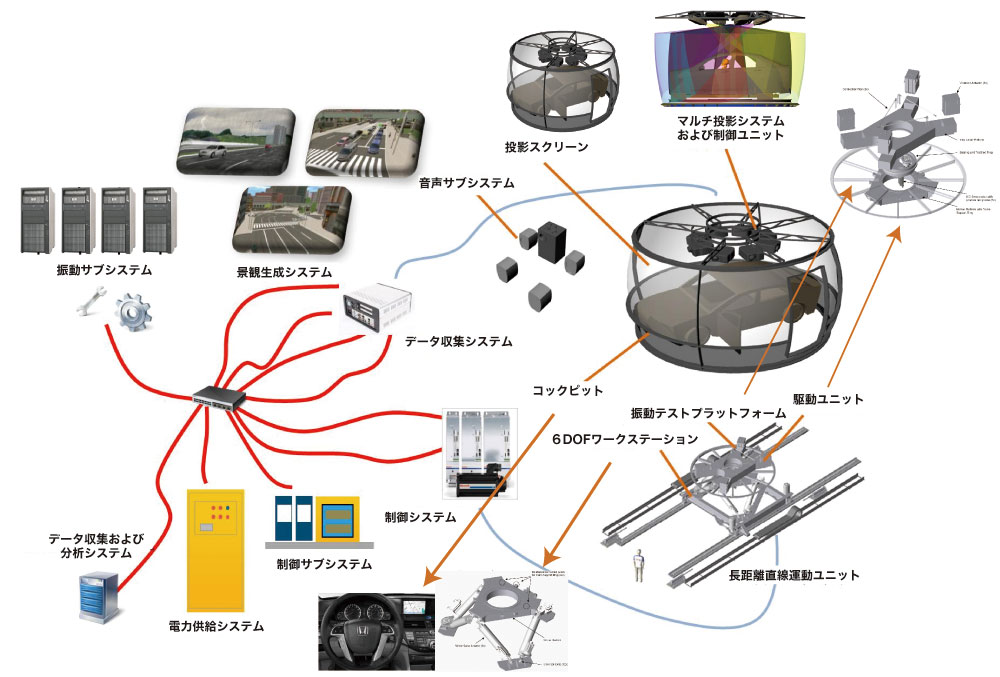
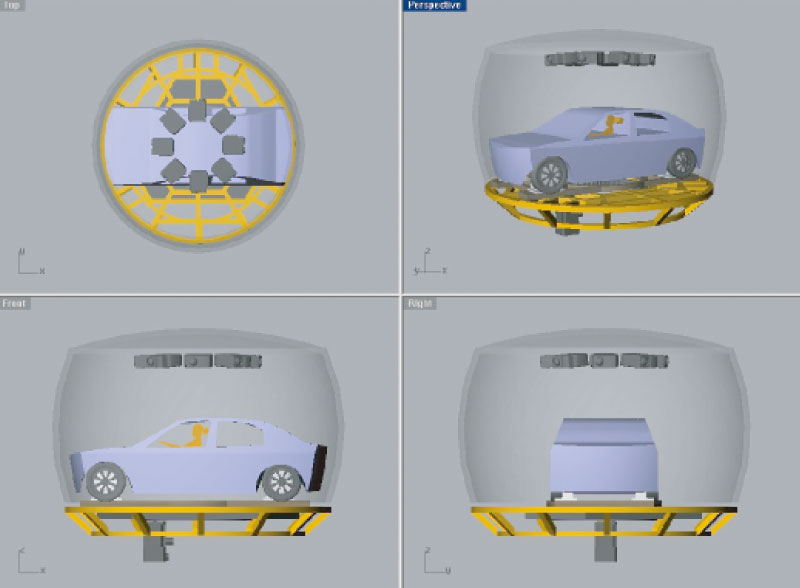
6DOFモーションプラットフォーム
6DOF Motion Platform |
6-DOF Motion Platform
Bosch Rexroth EMotion-4000-6DOF-700-MK2 |
| 2 |
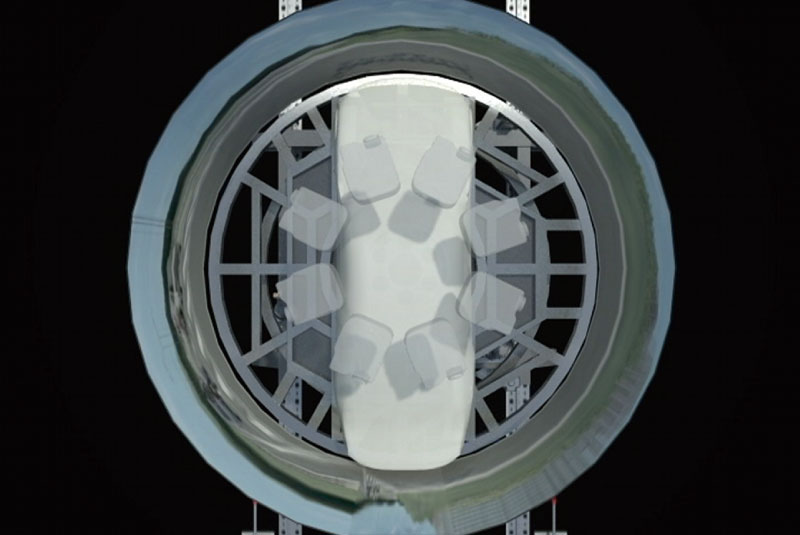
回転テーブル
Yaw Table |
Yaw Table
Yaw table for E-Motion 4000 |
| 3 |
モーションプラットフォーム
Vibration Test Platform |
Vibration
Bosch Rexroth E-Motion4000 Vibration |
| 4 |
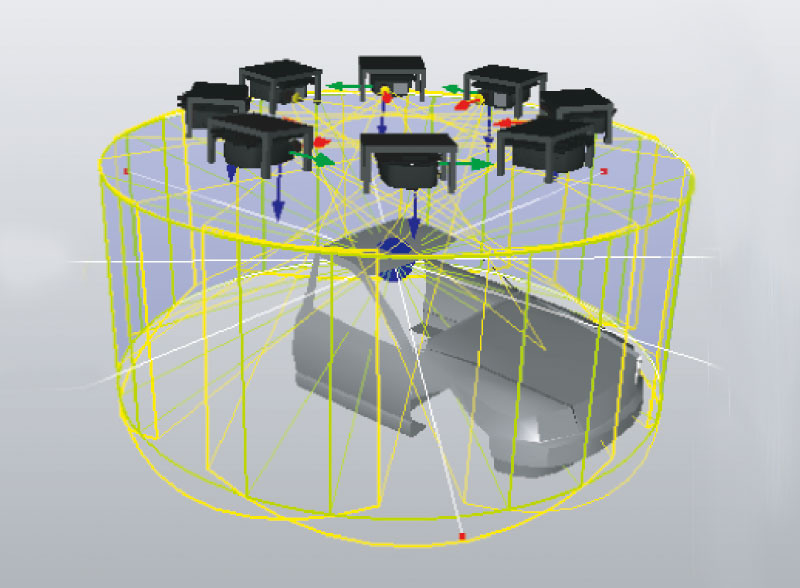
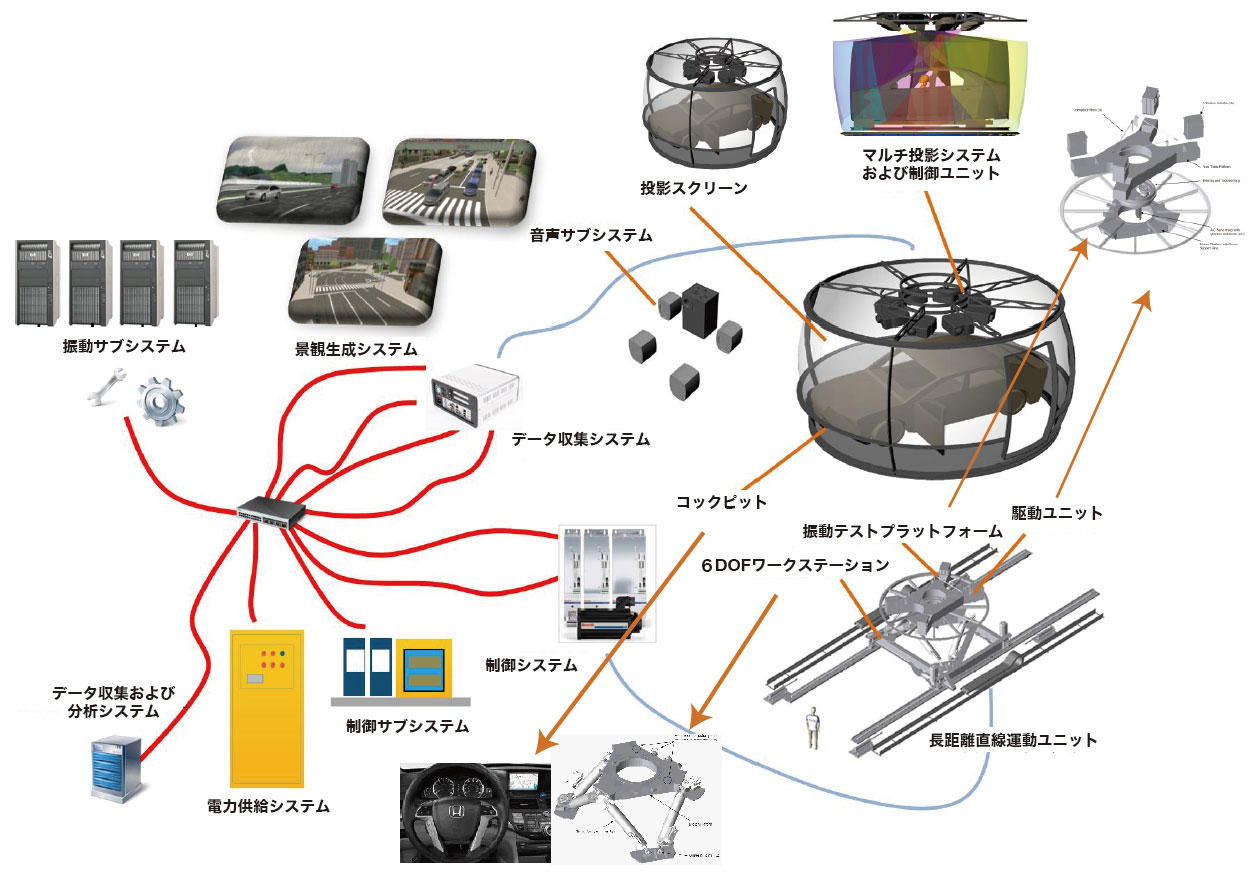
マルチチャンネル投影システム
Multi Project System |
BARCO SIM5R |
| 5 |
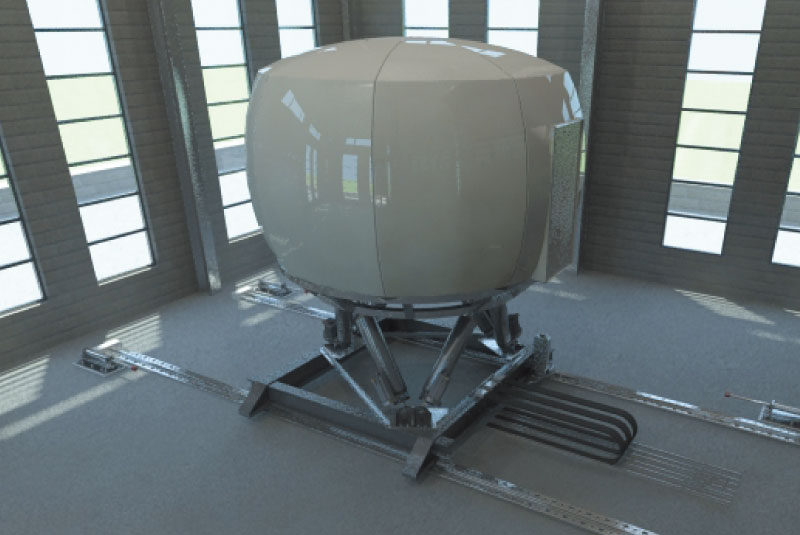
ドーム&スクリーン
Projection Screen |
Innosimulation Order Made Dome structure and screen |
| 6 |
長距離直線テーブル
X Axis Table |
Bosch Rexroth Order Made Long excursion
1(one) axis motion table |
| 7 |
音声システム
Sound Sub System |
Innosimulation Order Made Audio
Subsystem |
| 8 |
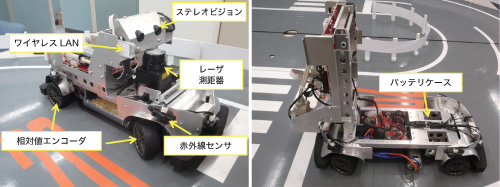
車輌コックピット
Cabin |
Honda Accord |
| 9 |
電源システム
Power Supply System |
Bosch Rexroth Order Made Power Supply Subsystem |
| 10 |
サブ制御システム
Control Sub System |
Control System DELL Precision T3400 |
.gif)