|
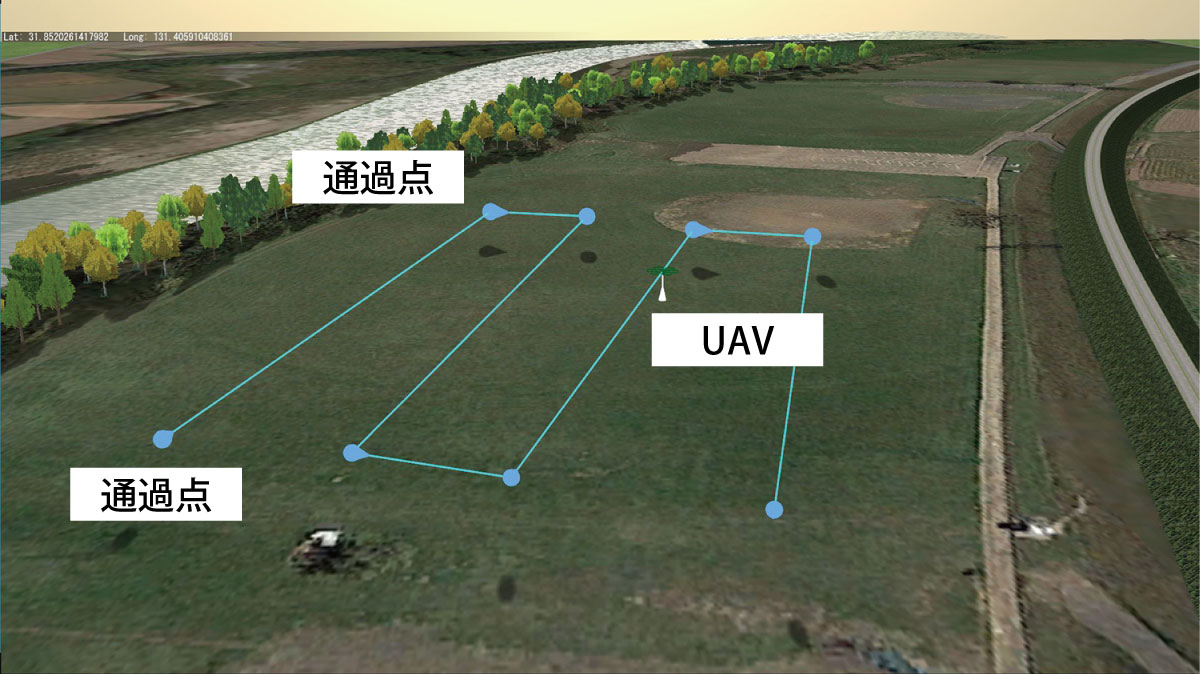
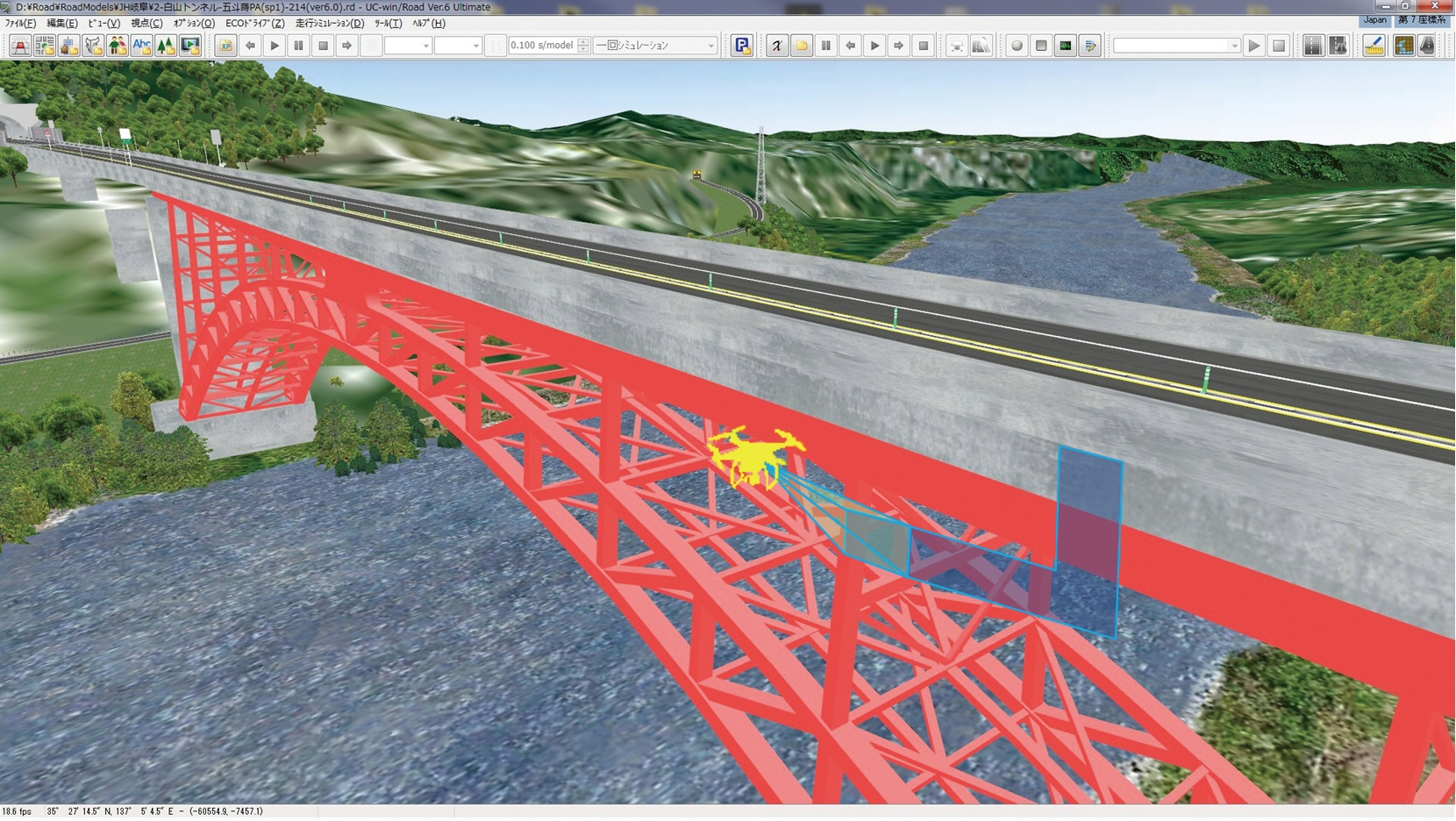
UC-win/Road 上で通過点を選択し、通過点上での行動 (写真撮影や録画開始など)を追加することで、フライト計画を作成することができます。フライト計画を作成後は、その情報がUAVにアップロードされます。そしてUAVは自動的に離陸し、それぞれの通過点を通過し、行動が定義されている場合はそれを行い、最後に自動的に着陸します。フライト実行後は、写真や動画のメディアファイルをUC-win/Roadから無線でダウンロード可能です。
■対応機種
検証済み: Ph3 Advavced、Ph3 4K、Ph3 Professional、DJI Phantom 4 Pro、Mavic Pro、Matrice 200シリーズ、Matrice 600、Spark
未検証 : Inspire 1
|
.gif)
.gif)