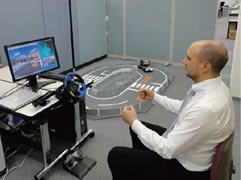
Kinect™の前でステアリングを操作するように両手を動かすことでUC-win/Roadの運転操作が行えるシステム。Kinect™が検出したドライバーの両手の位置情報を車のステアリング、アクセル、ブレーキに変換します。

▲Kinect™センサー
●Kinect™ センサーとは
Kinect™センサー(以下、キネクト)は、Microsoft社販売の家庭用ゲーム機「Xbox360®」の周辺機器としても用いられ、コントローラーを用いることなく身体の動き、ジェスチャー、音声などによる操作を可能とするデバイスです。カメラやセンサーが搭載されており、キネクトの前にプレイヤーが立つと自動的にプレイヤーが認識されるようになっています。
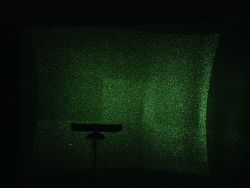
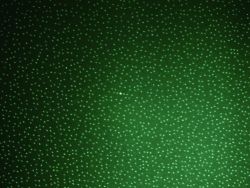
この技術は研究開発会社、プライムセンス社が開発した距離カメラテクノロジーをベースとしており、センサーにはVGAカメラ、3Dスキャナー、4つのマイク、傾斜モーターなどの基部が含まれています。3Dスキャナは点パターンを連続的に与える赤外線レーザー(周波数は赤信号より少し低い)で構成されています。レーザーは人間の目には見えませんが(波長は約780nm)、暗視カメラで検知できます(図1a・1b)。
 |
|
 |
| ▲図1a キネクトセンサーの暗視モード画像 |
|
▲図1b 壁に投影した点パターンの拡大ビュー |
1.距離画像出力
640×480ピクセルの距離画像(画素毎にセンサーから最も近い物体の距離を格納)の提供します。
2.ユーザ検出・追跡
センサ視野内の人体検出・追跡が可能です。
3.骨格検出・追跡
人体の関節位置の検出・追跡が可能です。
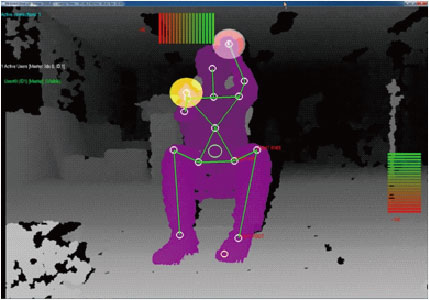
▲AirDrivingインターフェース
4.Air driving
両手のハンドル操作・右足のア クセル・ブレーキ操作を認識し、ドライビングシミュレーションのジェスチャ操作を可能にします(UC-win/Roadで はステアリング・アクセル・ブレーキ動作に対応)。
 |
▲Kinect™センサーと6Kマルチクラスタデジタルサイネージを利用した
UC-win/Roadのジェスチャドライビングシミュレーション
(東京ゲームショウ2011) |
●Kinect™による車輌制御と運転操作イメージ
UC-win/Roadと連携させることで、手を動かすだけで、「仮想ハンドル」を握ったドライブシミュレーション体験が可能。
実際の運転と非常に近い自然な状態を保てる。
- ニュートラル状態
アクセル、ブレーキの操作はKinect™から両手までの距離を基に求めており、ニュートラル状態から前後に動かすことで操作する。
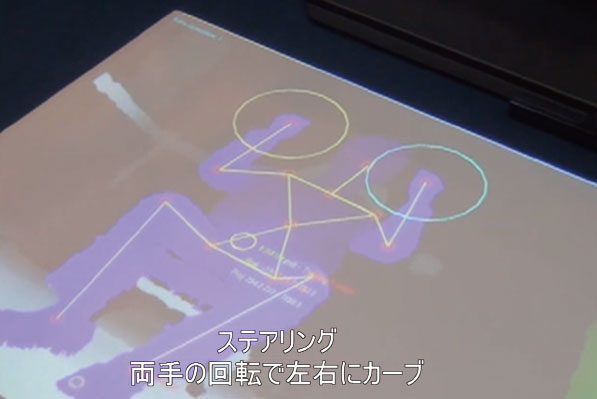
- ステアリング操作(ニュートラル状態からの右折・左折)
アクセル、ブレーキの操作はKinect™から両手までの距離を基に求めており、ニュートラル状態から前後に動かすことで操作する。両手を実際のステアリングと同じように回転させることでステアリング操作が行える。実際の車と同様に腕を回転させ右折・左折が可能。
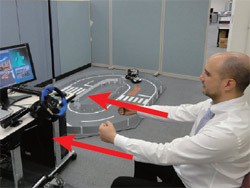
- アクセル操作
ニュートラル状態から両手を前に突き出すことで行う。アクセル量は前に突き出す距離が長いほど大きくなる。
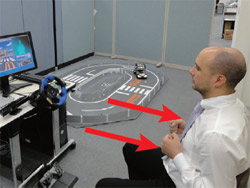
- ブレーキ操作
ブレーキ操作はニュートラル状態から両手を手前に引くことで行う。ブレーキ量は手前に引く距離が長いほど大きくなる。
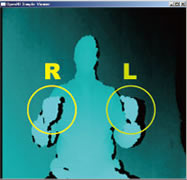
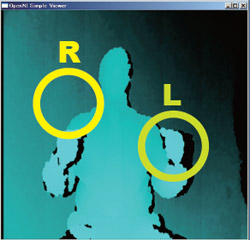
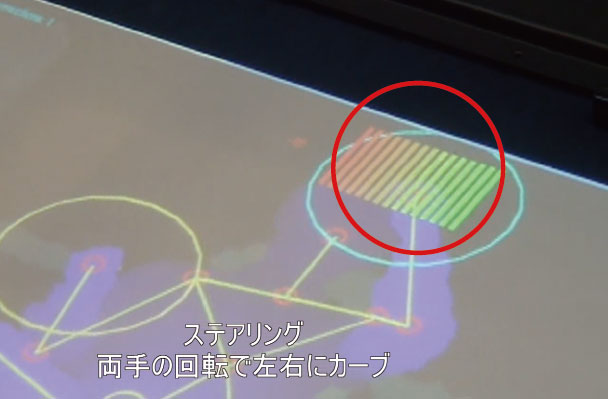
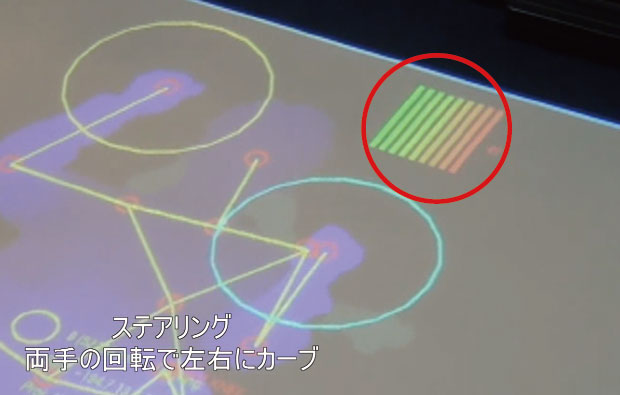
- ハンドルの舵角の向きと量の検出
前に突き出した右手拳と左手拳の位置関係から、右折、左折の向きと、舵角をアナログ値として検出します。
検出量を緑色から赤色に変化するバーとして表示します。赤くなるほど、制御量が多いことを意味します。
 |
 |
 |
| ▲直進 |
▲右折:右に切るほど、
右方に赤いバーが伸びる |
▲左折:左に切るほど、
左方に赤いバーが伸びる |
- アクセルとブレーキの識別
右足つま先の、左右に開く角度の検出により行います。
 |
 |
| ▲アクセルポジション |
▲ブレーキポジション |
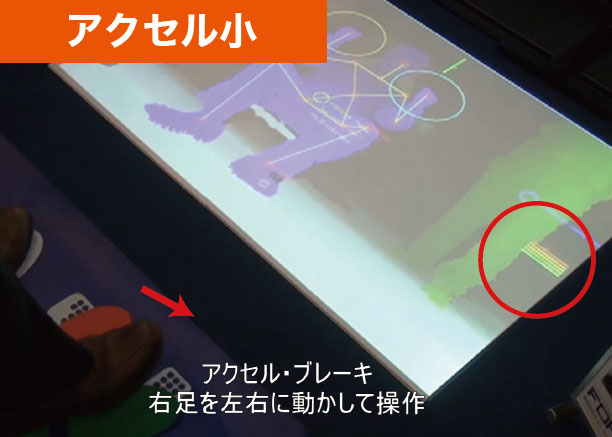
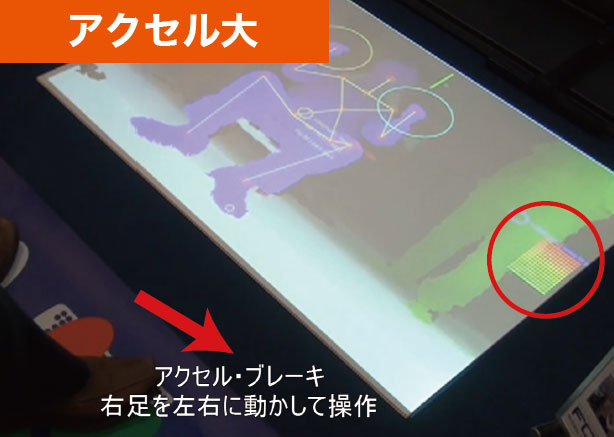
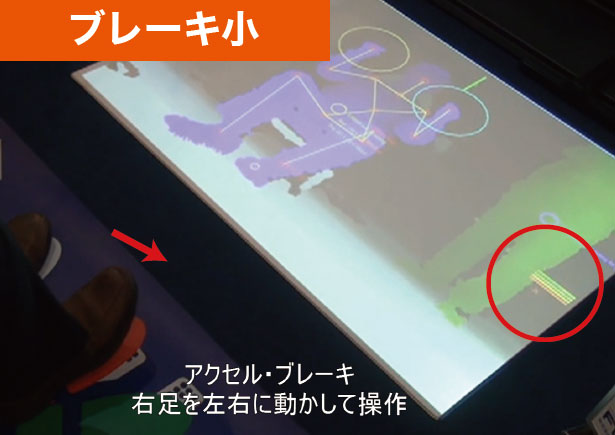
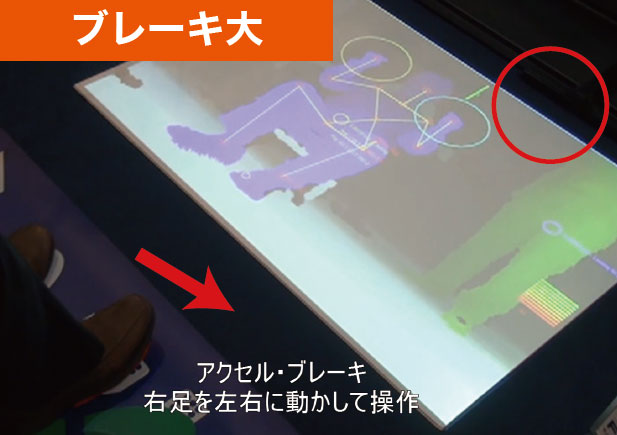
- アクセル、ブレーキの踏込量の検出
アクセル
アクセルの踏込量をつま先の位置からアナログ値として検出します。アクセルの場合、検出結果が上向きに表示されます。
ブレーキ
ブレーキの踏込量をつま先の位置からアナログ値として検出します。ブレーキの場合、検出結果が下向きに表示されます。
5.バーチャルギアレバー
物体の把持動作・ギア操作ジェスチャを認識します(UC-win/Roadでは前進と後進の切り替えに対応)。
6.ジェスチャインタフェース
右手の上下左右の動作の組み合わせによって最大12種類の動作を認識します(UC-win/Roadで は前進と後進の切り替に対応)。
|
.gif)
.gif)