 |
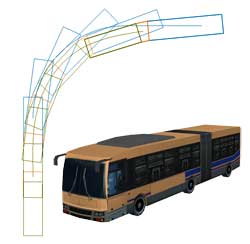
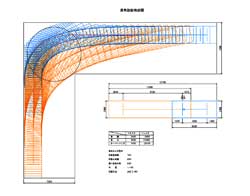
| ■图1 组合行驶(红圈是返回位置) |
| New Products | |||||||||
|
|||||||||
| 主要产品功能 |
| 本次改订以行驶方法及对应车种、与3DVR模拟的连接強化为中心对功能进行了追加和改善。 |
| 组合行驶 |
以往是如图1所示,行驶路径只要有一部分反回,就需要通过「反回行驶」对包含直行部的全路径进行个別设置,输入上要花费大量时间。本次改订中对应了线形行驶和返回行驶相结合的「组合行驶」。由此,只有返回行驶设置时,大幅度减少了输入的时间。
|
| 连结巴士 |
作为新车辆对应了连结巴士。连结巴士如图2所示,先头车辆的后面是关联了复数台巴士的连结构造,各车辆间有车篷用于车辆间的穿行。本程序中假定了类似全拖挂的行为进行轨迹计算。
|
| 行驶速度和回旋半径的关系设置 |
各车辆通过输入行驶速度和回旋半径的关系,根据输入的速度追加了可配套回旋半径(或对应回旋半径的速度)的功能。
|
| 对应线形调整功能 |
线形行驶中,追加了线形(路线)调整功能。例如,最初设置的线形(路线)中接触行驶路线,在确认行驶轨迹的同时可调整线形。如图4所示,确认移动轨迹的同时可调整,线形行驶的设置变得更简单。
|
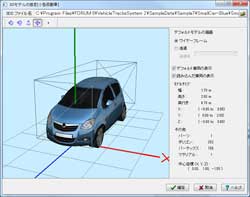
| 对应3D模型的设置 |
Ver.1的OpenMicroSim文件输出功能根据车辆诸要素形状输出矩形模型,设置不同模型时需要在UC-win/Road中设置,现对应了可在程序侧设置。
|
| 设置停止时间 |
OpenMicroSim文件中对应了停止时间的设置。停止时间如图6所示,分别可设置「行驶开始位置」、「回旋开始/结束位置(返回行驶时为返回位置)」、「行驶结束位置」。此外,保存OpenMicroSim文件时,计算轨迹的每1步骤可设置停止时间。
|
| 图纸上车轴的制图 |
图纸对应了车轴的制图(图7)。可选择是否制图,可设置更加详细的图纸设置。
|
| (Up&Coming '12 夏季号刊载) | ||
 |