 |
 |
|
本連載は、「システム開発」をテーマとしたコーナーです。フォーラムエイトのシステム開発の実績にもとづいて、毎回さまざまなトピックを紹介していきます。第25回は、F8VPSで車両走行状況を可視化した事例について紹介します。
F8VPSと高精度測位システムとの連携による車両走行状況の可視化
はじめに
デジタルツインの浸透により、現実世界と同じ空間を仮想世界で再現する試みが増加しています。建物や樹木など静的なモデルは現実と同じ位置に配置すればよいですが、自動車など動的なモデルはリアルタイムで位置情報の同期が必要になります。一般的に用いられるのはGPSですが、今回はGPSより高精度な測位システムを用いて、弊社製品F8VPS(FORUM8 Virtual Platform System)で車両走行状況を可視化した事例をご紹介します。
高精度測位サービスとは
(1)GPSの概要と課題
一般的にGPSと呼ばれる位置情報システムは、厳密には人工衛星による全球測位衛星システム(GNSS)の中に含まれるものです。GNSSはGPS以外にも、QZSS(衛星みちびきによるシステム)や、GLONASS、Galileo等のシステムが存在します。
現在GPSは広く普及していますが、測定方法による測位精度の低さが課題です。GPSは単独測位によって位置を測定しますが、スマホ等の単独の受信機によって行うものです。この測定法により実際の位置と大きくズレが生じます。場合によっては数メートル~10メートル程度のズレが生じることもあり、例えば走行時の車両の位置を把握する時には適していません(走行している車線とは異なる車線、反対車線の位置を取得してしまう)。
(2)RTKによる高精度測位サービス
このような課題を解決するためには、RTK(Real Time Kinematic)による測定方法が有効となります。RTKは単独測位ではなく、相対測位によって位置を測定します。固定局と基地局の2つの受信機によって位置情報を補正し、単独測位よりも高精度な位置情報を取得します。
RTKでも多少のズレは生まれますが、その範囲は数センチメートル程度であり、測位精度が格段に向上しているのが特徴です。これにより、走行時の車両の位置を監視するといったことにも活用が可能です。
F8VPSとRTK測位システムとの連携
(1)F8VPSとRTK測位システムとの連携
今回はRTK測位システムによる高精度測位サービスのichimill[1]と連携した事例となります。ichimillのAPIにより、車両の位置情報をリアルタイムで取得します。
(2)F8VPSでの操作画面
F8VPSの画面にて「RTK」メニューを追加しています(図1)。以下、各項目の詳細です。
・追跡開始:RTK測位システムと連携開始し、実車両の位置情報を車両モデルに反映(位置情報に基づき車両モデルが移動を開始)
・追跡終了:RTK測位システムと連携終了し、車両モデルは停止状態となる
・一時停止:RTK測位システムとの連携を一時停止し、再度押下すると連携を再開
・設定:カメラ視点の高さや視野半径、標高の調整等を行う
・ログデータ読み込み:過去に走行した位置情報のログをCSV形式で読み込み、車両モデルの位置に反映させる
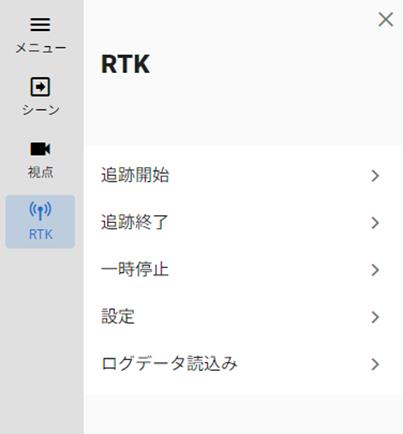
図1 「RTK」メニューの追加
また、「ログデータ読み込み」を選択時の画面を図2に示します。CSVを読み込み後、ログデータによる車両モデルの移動を開始します。開始、停止、一時停止のみでなく、早送り、巻き戻し、ループ再生の機能も備えています。
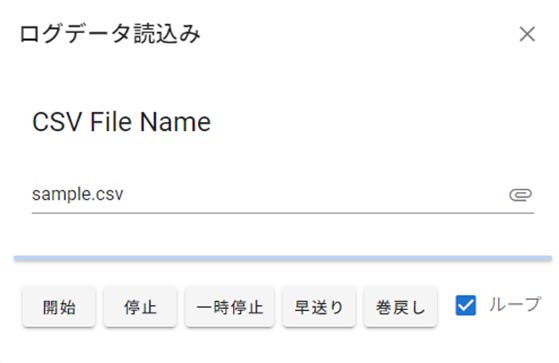
図2 ログデータ読み込み
(3)車両走行状況の可視化
RTK測位システムからの位置情報に基づき車両モデルが移動する様子を図3に示します。F8VPSでは「シーン」の切り替えが可能であり、あらゆる路面環境が再現できます。
例えば、降雪の環境で走行した位置情報をリアルタイムで取得し、F8VPSでは雪のない路面状態のシーンで走行させることによって、雪道の中で車線や停止線等をはみ出さずに走行できているかの検証にも活用できます。
また、ログデータの読み込み機能を活用し、過去に走行した軌跡を様々なシーンで再生することも可能です。
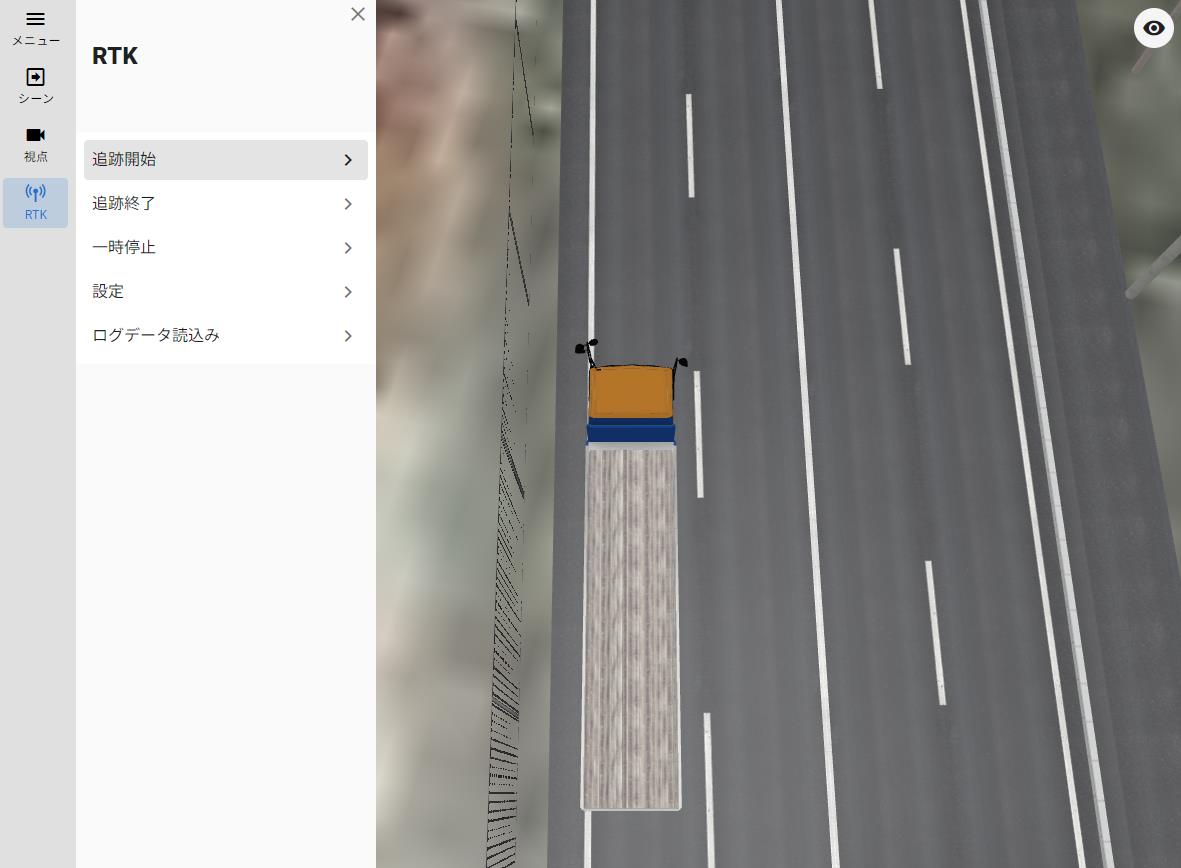
図3 RTK測位システムから位置情報を取得し
車両モデルに反映
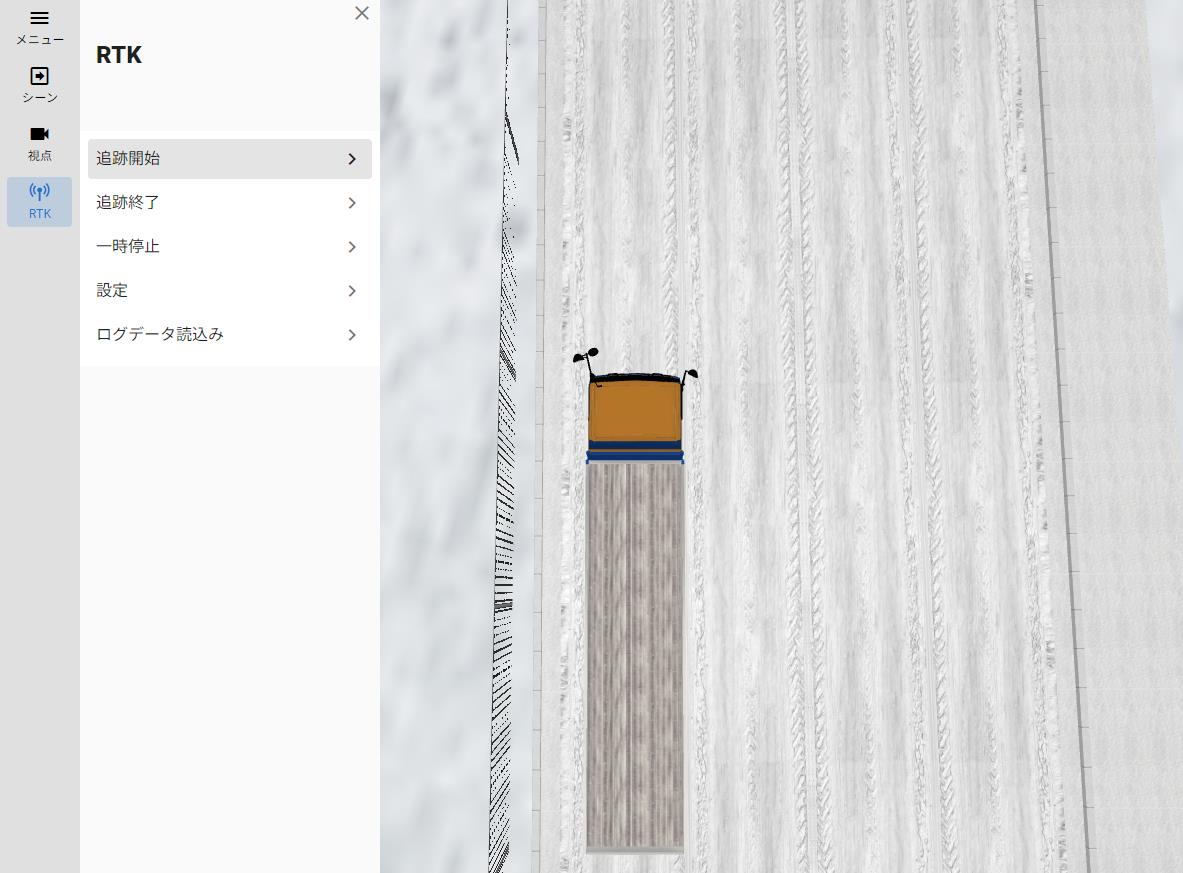
図4 「シーン」の切り替えにより
同じ位置情報データで雪道での走行も可能
実業務への応用
F8VPSとRTK測位システムとの連携を通して、例えば以下のような実業務へ応用させることができると考えられます。
(1)工事現場のリアルタイム現況把握
重機にRTK測位システムの受信機を取り付け、重機の位置をリアルタイムで把握する。また、位置情報から重機の移動距離や速度、走行軌跡も把握できる。さらに、VRデバイスに接続して現場にいるような没入感を与える。工事の進捗や重機の稼働状況等の情報共有のコストを削減することができる。
(2)アバターによる遠隔コミュニケーション
F8VPSではアバターを設置でき、アバターを介して現場と遠隔地の間でテキスト・音声・動画などを利用したコミュニケーションが可能となる。また、F8VPS内でアバターによるWeb会議を開くことができる(図5)。工事現場のすぐ隣に会議室を設けることで、会議中であっても重機のリアルタイムの状況を把握できる。

図5 アバターによるWeb会議の例
おわりに
今回はF8VPSと高精度測位システムとの連携により、車両の走行状況を可視化しました。高精度測位を実現するためにはRTK測位システムが必要ですが、これまで独自での基地局設置や高価な受信機の購入など使用するハードルが高かったのが現状です。しかし、今回使用したichimill等の新たなサービスの利用によって、高精度な位置情報をリアルタイムで取得し活用できるようになりました。
F8VPSとRTK測位システムとの連携により、デスクトップアプリケーションをPCにインストールすることなく、タブレット等のWebブラウザ上にて車両の監視が可能です。また、一般車両のみでなく重機や特殊車両の位置情報取得も可能であるため、土木建築分野の業務への応用も可能です。今後の開発にご期待ください。
参考文献・ホームページ
[1] https://www.softbank.jp/biz/services/analytics/ichimill/(閲覧日2023/12/12)
(Up&Coming '24 新年号掲載)
|
||||||||

 Up&Coming |
