|
||||||||||||||||||
|
在有著超過140年歷史的北海道大學中,研究室的地位 今年可以說是比往年下雪要少了,在JR札幌站的周邊街道兩側的積雪感覺會持續到三月上旬。我在這時去拜訪了札幌站附近的北海道札幌校區的尖端機動工程(萩原)研究室的萩原教授。 |
|||||||||||||||||




以1876年建立的札幌農學校為起源的北海道大學,歷經140多年,在學校中設立了文學、法學、理學、牙科、工程、獸醫學、教育學、經濟學、醫學、藥學、農學、水產12個本科生院以及3個研究科、14個研究院、17個學院、1個教育部、一個合作研究部。本科生和研究者總人數超過了一萬八千人(各個數據都採集於2018年4月現在),分別在札幌和函館兩個校區進行著教育和研究。 這其中,萩原研究室所屬的工學研究院涵蓋了應用物理、應用化學、材料科學、機械宇宙工程、人類機械系統設計、能源環境系統、量子理工程、環境領域工程,北方圈環境政策工程、建築城市空間設計、空間性能系統、環境創生工程、環境循環系統,共13個部門37個專業。其中北方圈環境政策公學部門還分寒冷地區建設工程和技術環境政策學兩個領域,萩原研究則屬於後者。 從著眼於駕駛員行為,到馬上就要展開自動駕駛 萩原研究室是以駕駛員的行為,尤其是關於其目標確認性的研究為基礎,跨越了交通計劃到交通工程、社會安全系統科學、土木工程等領域來進行研究開發從而支援社會。這也與他們想要透過各式各樣的視角來防止交通事故發生的想法不謀而合。 萩原教授著眼於司機行為這件事可以追溯到30年前教授的寫的關於駕駛員行為的視點的論文。在那之後,教授的研究就變成了「駕駛員在看什麼、想什麼、採取什麼樣的行動會有什麼樣的結果」。其中「因為駕駛員失誤而造成的交通事故」這個研究問題尤其吸引教授注意。教授為了讓駕駛員不出現失誤,一直在努力進行對策和技術的研究開發。據教授所說,近些年他一邊提高車輛本身的性能,一邊將重點從控制車的駕駛員身上轉移到了控制車的機器身上。 「這就是現在最大的變化吧,現在就變成了這樣全新的研究(在開頭已提到過)。」 大概五年前開始把自動駕駛作為研究對象。在那之後,就進一步把自動駕駛作為主要研究方向了,不過也不是總會研究自動駕駛系統這一個方面,我還會以修道路的基礎設施的一方的視角來考慮著「什麼事情是非做不可的」,從而找到和駕駛員行為的關係。 如果說萩原教授致力的事業的話,就是之前所說的萩原教授應聘並獲得補助的兩個研究。 一個是、以交通事故解決方案為政策領域的「城市街道間正向配光(Pro-bean照明)的研究開發」(研究代表人:萩原教授、研究期間:2016年-2018年三年)。這是一個防止在晚上出現橫穿馬路行人的事故,著眼於如何使駕駛員今早發現行人的研究。在這個研究裡,我們開發出了透過協調行人頭燈和車輛前進方向的燈光來使得駕駛員今早發現行人的「Pro-bean道路照明」。 另一個則是對應特定課題(關於自動駕駛社會實現的必要基礎設施)的「靈活運用自動駕駛與車站來支撐生產創造新的道路的相關開發研究」 (研究代表:有村幹治/室蘭工業大學副教授、研究時期2017-2019的三年)。由於人口減少而很難維持公共交通設施和物流,因此北海道農業水產業和觀光業共同註意並正在研究的「生產空間」問題。旨在研究道路交通環境以及包括自動駕駛和活用路上車站的道路交通政策的理想狀態。萩原教授在參加該計劃的時候,選擇了使用UC-win/Road DS。 另外,萩原教授還和國土交通省北海開發局、NEXCO東日本・中日本・西日本,NEXCO總研究中心,本四高速等各家公司聯手開發。比如,他們考慮到駕駛員視力確認性的問題,從而一起開發研究在什麼樣的道路上照明,以及隧道照明是不是在晚上容易看到的問題。
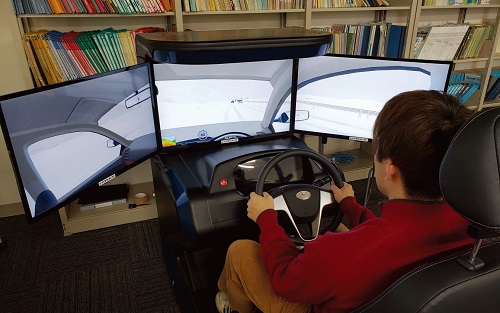
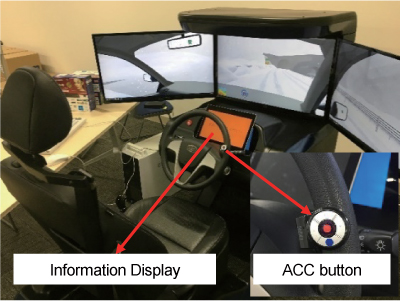
為了研究在冬季使用ACC功能的駕駛員行為,決定使用UC-win/Road駕駛模擬器 從五年前開始,萩原教授就著手研究自動駕駛,同樣也是五年前也接近讓駕駛員在田野上進行觀測的行動。但是與此相對的是,從2017年開始的,透過國土交通省道路局補助才得以實現的,自動駕駛與活動站台來支持生產空間的新的道路交通政策的研發是以使用VR技術為前提條件的。萩原教授著眼的地方有兩點,第一、在實際生活中在田野上開車並不能每次都可以有相同的條件背景,而透過VR技術就很有可能把實驗條件和重複自動駕駛保持在很高的相似度上。第二即使是VR上發生衝突的情況也不會伴隨真正的危險。
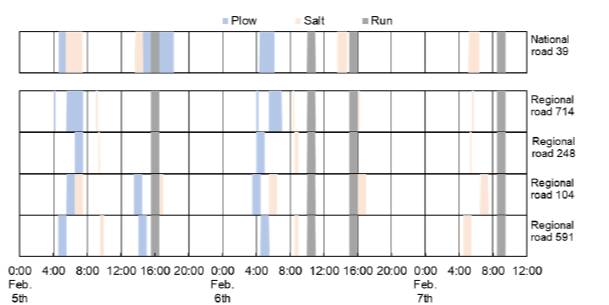
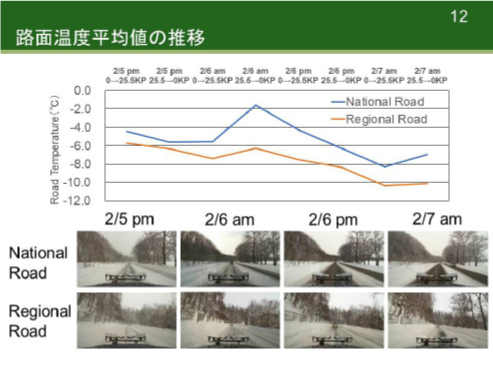
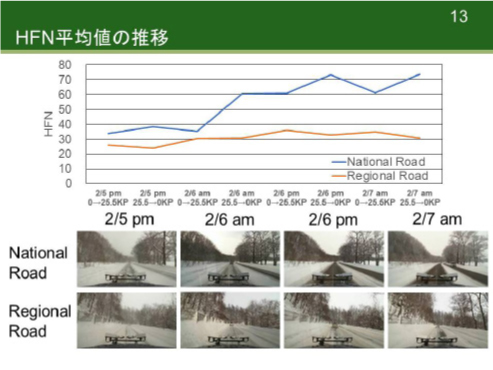
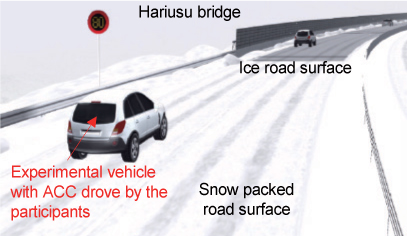
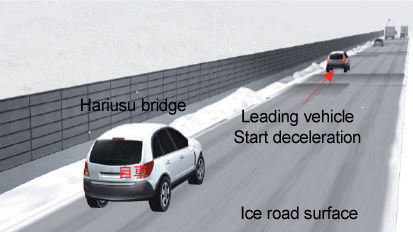
萩原教授首先把在冬季的道路條件下路況和自動駕駛系統相關聯,把道路方設定為「當出現自動駕駛系統的傳感系統檢測不出來的前方路面狀況、視野狀況等有風險的情況時,會通知自動駕駛系統。」同時,此研究還在觀察冬季高速路上使用自適應巡航控制電源(ACC)的駕駛員在前方容易發生打滑的路面上(低μ路)為了放置發生危險而產生的提前規避的行為,並對此提供相應資訊。因此也就測算了1)駕駛員已知前方是低μ路後的駕駛情況和2)駕駛員知道前方是低μ路以及應對方法的駕駛情況的差異性。因為在實際道路上我們很難再現上述兩種情況,因此我們使用了DS來完成實驗。 在研究三年期間的第一年(2017年)。北海道大學有46人參加上述實驗。在旁邊處理其他計劃的場區實驗中,由於不管道路的光滑度而給道路曲線結果造成了很大的影響。因此,接下來的第二年就比前一年多少改變了場合,加入了道路線性的要素,也同樣有32名學生參加了該實驗。
關於研究最後一年的打算和今後對VR的使用 在這次實驗中使用的VR透過同一個研究室中的UC-win/Road做出來了一個可以充當實驗環境的地形數據。 萩原教授說道,FORUM8那邊稍微加了一點腳本,補足了UC-win/Road中的不足,準備了我們要求的軟體,而且還有隨時的售後服務和技術支援。在這個基礎上我們大學方面才最終將設備調整到了最終狀態。透過這樣的程序,我們對UC-win/Road的評價是「方便的地方有很多」,同時在做實驗的時候也真切地感到了這一點。在這個基礎上,在最後一年(2019年)我們將要一點點的改變自動駕駛系統,並且考慮反複使用VR做和去年同樣的實驗。 在這次的研究中,為了理解自動駕駛和駕駛員的互相干涉,我們使用了VR技術。以此為基礎,我們想要在將來開發出更好的自動駕駛界面,創造讓駕駛員不出錯誤的道路。 |
||||||||||||||||||||||||||||||
| 作者:池野隆 (Up&Coming '19 春季號刊載) |
||||||||||||||||||||||||||||||


|
||||

