| UC-win/Road for RoboCar(R) Ver.2 AURELO 对应版 |
|
| 扩展现实位置决定系统对应3D位置特定功能 |
| 发布 ● 2011年 1月 | Simulation |
| New Products | |||||||
|
|||||||
| 致力于机器人工学领域 |
| 到目前为止FORUM8主要的活动领域是基于三维模拟的土木工学、虚拟现实的方向,今年活动领域开始拓展到机器人工学这一新兴领域。 作为该领域最初的项目,通过以机器人工学为专业的ZMP公司携手开发,着手在机器人平台进行RoboCar(R)模拟。RoboCar是指车辆的缩小模型,通过外部设备和软件算法的进化可实现自律动作。此外,FORUM8还开始独自着手进行移动式机器人的开发。 |
| 最新版本功能 |
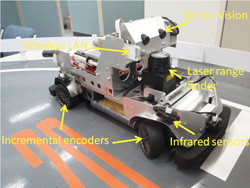
UC-win/Road for RoboCar(R)的开发目是从机器人工学获得灵感通过工具辅助机动车厂家进行新型运转辅助装置的开发,追求更加安全快捷的驾驶。RoboCar(R)的最新版(图1)功能如下所示。
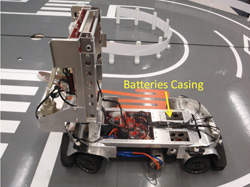
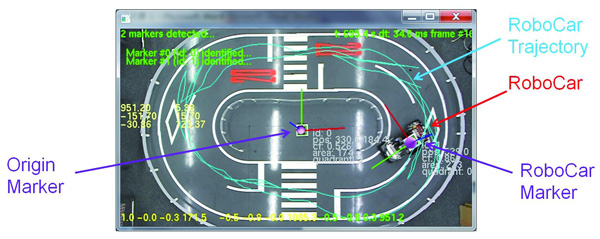
这些系统的全体是基于Linux的500M Hz CPU运行的主端口进行的管理。此外,构筑2.7m × 1.8m的赛道,横道的行人、护栏、交通信号灯等,模拟了实际的车辆行驶。运用FORUM8开发的UC-win/Road驾驶模拟器,在3D・VR环境中进行机动车模型的模拟(图2)。
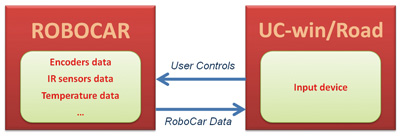
手动档模式下行驶时,例如用户通过方向盘、踏板(油门和刹车)等实际的RoboCar(R)和模拟模型,借助标准输入装置操作。UC-win/Road用户控制发送到RoboCar(R),RoboCar(R)传感器也实时发送回送数据(图3)。
|
||||||||
| 2D位置特定: 行驶距离计测法 |
| 为了适时地进行RoboCar(R)的模拟,UC-win/Road必须在抽样时间内把握RoboCar(R)的位置信息(位置和方向)。直到最近,此2D位置信息是根据行驶距离计测法的原理进行的测定。最近,运用过去抽样时间的位置信息、各车辆搭载的相对值编码器,基于车轮转転进行的计测(图5)。 该手法具有非常单纯通俗易懂的优点,但也受到车轮与地面滑动,以及其他的累计误差(通过统合手法各车轮的实际半径变动性等),性质不同的错误等负面影响。 实际上,即使RoboCar(R)和模拟模型在相同位置信息开始,通过这类错误的影响导致行驶距离边长,也会发生模型的计测位置信息误差。解决这个问题,需要在过去的位置信息之外,另行定期导入RoboCar(R)绝对位置信息的系统。调查了各类解决方案,最终采用了最容易实际可行的通过增强现实获得工具的办法。
|
| 增强现实位置決定系统(AURELO) |
增强现实(AR)是复合现实(mixed reality)的一种,是现实世界和虚拟世界之间的一种(图6)。
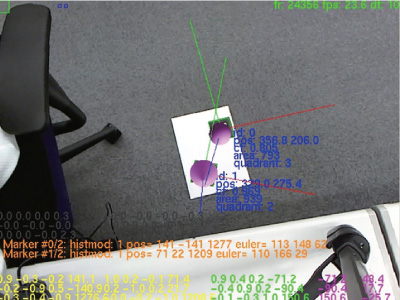
一般而言,AR场景是指插入现场视频图像的CG。AR工具的一部依存于厂家,决定轨迹项目的3D位置信息。 开发中的增强现实位置決定系统(AUgmented REality LOcalization System)可同时拖拽,可同时支持多个厂家的拖拽(图7)。各厂家显示相同边界(黑色四角形)基于黑色四角形内的模式进行标记的识别。
厂家和照相机的位置一但距离拉大计测报错便会增加。距离小于1.5m时,计测报错不满位置7mm、角度2度未满则默认为误差。 使用的AR工具中,仅可以识别参考照相机框架和相对的各插件变换矩阵。其结果,运用RoboCar(R)赛道上部的某照相机,通过2个标记可以现实RoboCar(R)绝对位置信息的追踪。图8是实际上方的视图。 最新版本的AURELO系统中最大可以在2.7m x 1.8m的大范围赛道内追踪RoboCar(R)。通过这样的结果,今后的版本中运用多重照相机系统追踪性能可进一步扩充更大范围。
|
| (Up&Coming '11 新年号刊载) |
 |