| New Products & Service | シミュレーション | ||||||||||
●リリース2021年5月 ※ショールームにて近日展示予定 |
|||||||||||
|
F8モビリティプロジェクト このプロジェクトは、個人用の移動車両(PMV)や移動機器のシミュレーションを目的としています。電動車いすや電動カート(図1.a)といった移動補助機器から、電動スクータ、セグウェイ、電動一輪車(図1.b)といった最新の移動機器のシミュレーションを想定しています。
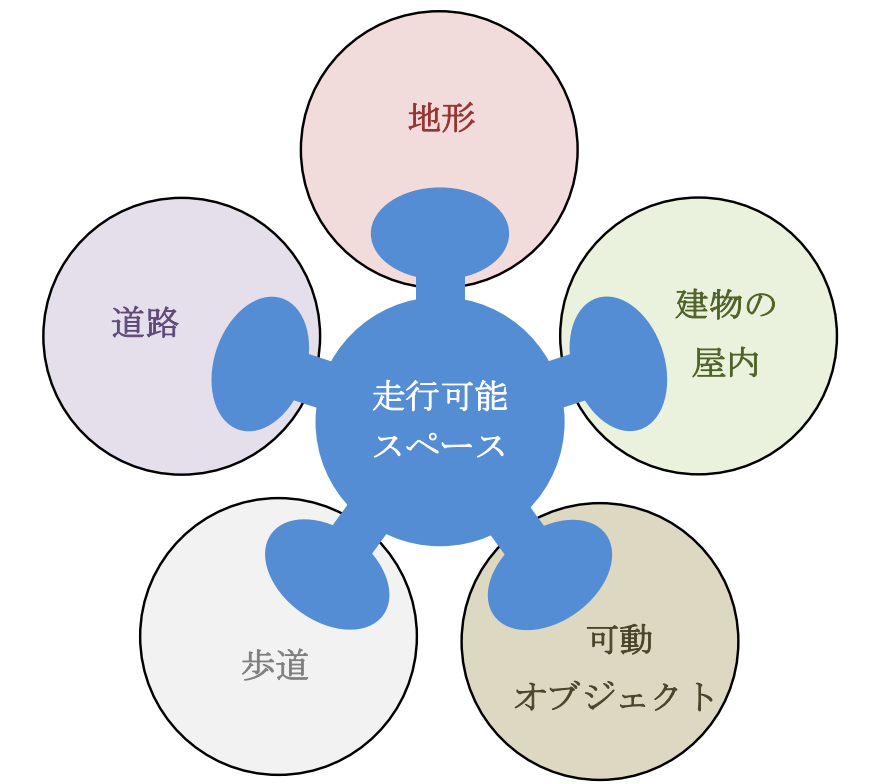
この新たな開発方針の動機として、高齢者の割合が増え続けている現状において、医学の進歩により人々がより長く健康に生きられるようになったことで、人々の自立やモビリティ(移動)への要求が増加していることが挙げられます。 もう一方で、都市部における新たな移動手段の出現や、自律運転の移動機器の進歩が、移動手段の考え方に大きな変化をもたらすことになるだろうということが挙げられます。さらに、近年のリチウム電池やセンサーの低価格化によって、小さくても動力の高いPMVが製造可能になり、このような新技術の拡大につながっています。 UC-win/Road上でのシミュレーション 現在UC-win/Roadでは、陸上、海上、空中の可動オブジェクトに対応しています。その挙動は入力デバイス(ジョイスティックやハンドル等)で制御し、歩行や、自動車、自転車などを制御した移動のシミュレーションが可能です。 PMV(個人移動車両)がVR空間を走行するために、歩道、建物、駅、ショッピングモール等の施設内で車両制御が可能になるようにUC-win/Roadの運転/走行シミュレーションの機能を拡張していきます。また、PMVがエレベータや電車などの可動オブジェクトに“乗り込む”ことも可能にする予定です。そのため、PMVでアクセス可能なVR空間の一部を“走行可能スペース”としてモデル化します。このスペースは、VR空間のあらゆるオブジェクト(地形、道路、歩道、建物の屋内、可動オブジェクト)を統合することで定義でき、1つのオブジェクトからもう1つのオブジェクトへと“移動”することが可能になります(図2)。
最終的には、群集シミュレーション機能の改良を行い、シミュレーション対象の歩行者の群集がPMVとの衝突を検知し、リアルタイムでその周りを歩行することが可能になる予定です。 車いすシミュレータの開発 第一段階では、屋内/屋外の車いすシミュレーションに焦点を当て開発を行います。そのためにWHILL Model CR車いす(図3)の研究開発モデルを入手し、これを開発のプラットフォームとして使用します。このモデルの主な利点としては、ユーザーのジョイスティックによる操作情報にアクセスしやすい点と、自律走行機能開発用のセンサーを統合可能である点が挙げられます。
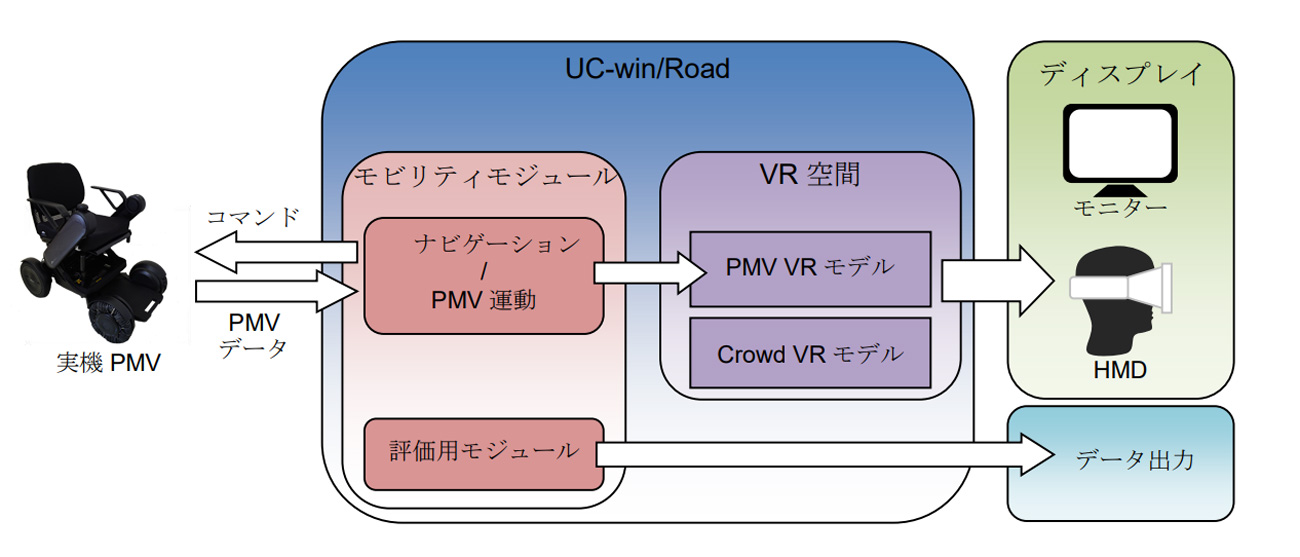
実際に車いすに座り、車いす自体は動かさずに、モニターまたはヘッドマウントディスプレイ(HMD)を通してVR空間を走行可能になるような機能を想定しています。このシステムの完成のために、PMS運転者の運転技術を評価する評価用モジュールを開発します。 全システムの概要は図4の通りです。
|
|||||||||||



| (Up&Coming '21 春の号掲載) |
|
|

