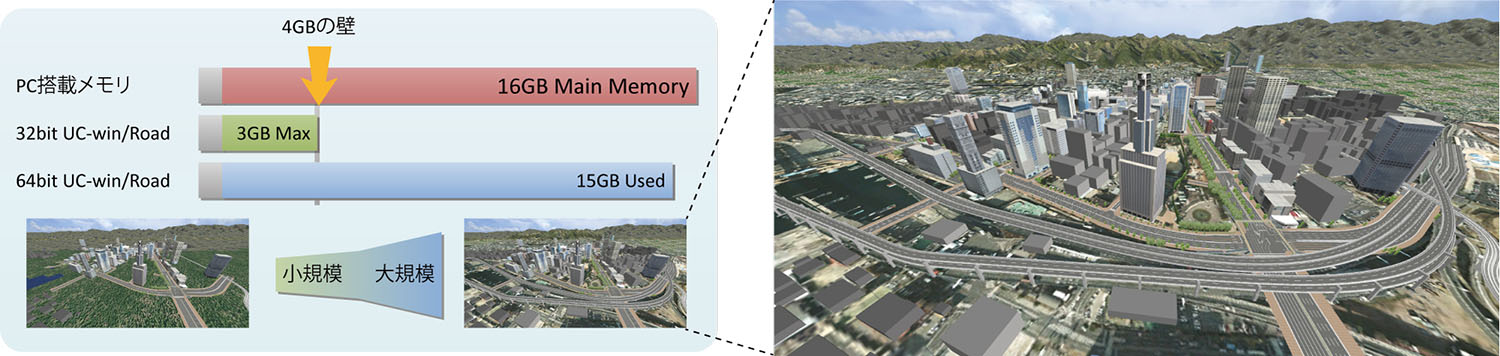
一般来说indows 64bit OS上为了直接启动32bit App,会在64bit地址空间上的虚拟32bit OS的作用并时启动WOW64(Windows on Windows64),并在32bit地址空间当中动作。并且,32bit App的内容使用限制在4GB以内。
此次因为对应64bit,PC的资源可得到更加完整的应用。可使用4GB以上的内存量,没有WOW64的中间介入,可期待其速度提升。
UC-win/Road拓展功能
可以期待64bit化会有各种各样的功能提升,以下是代表性事例。
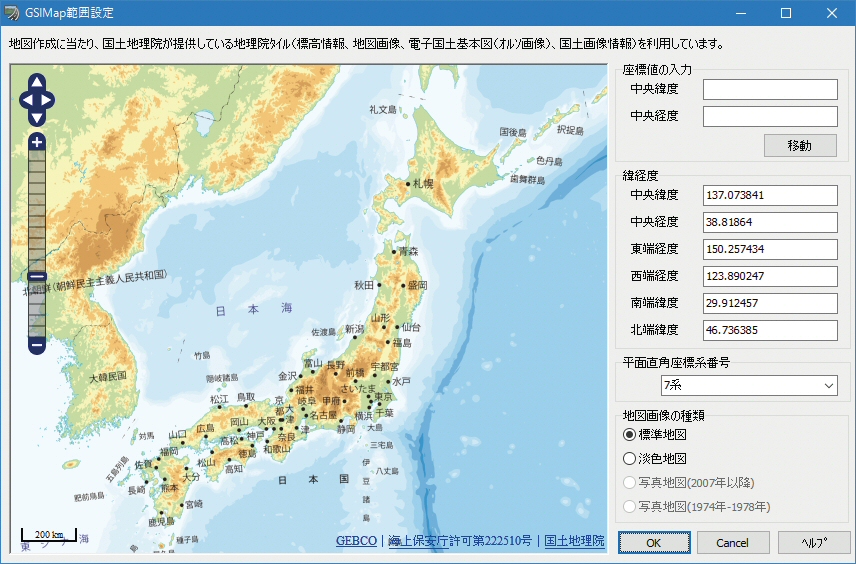
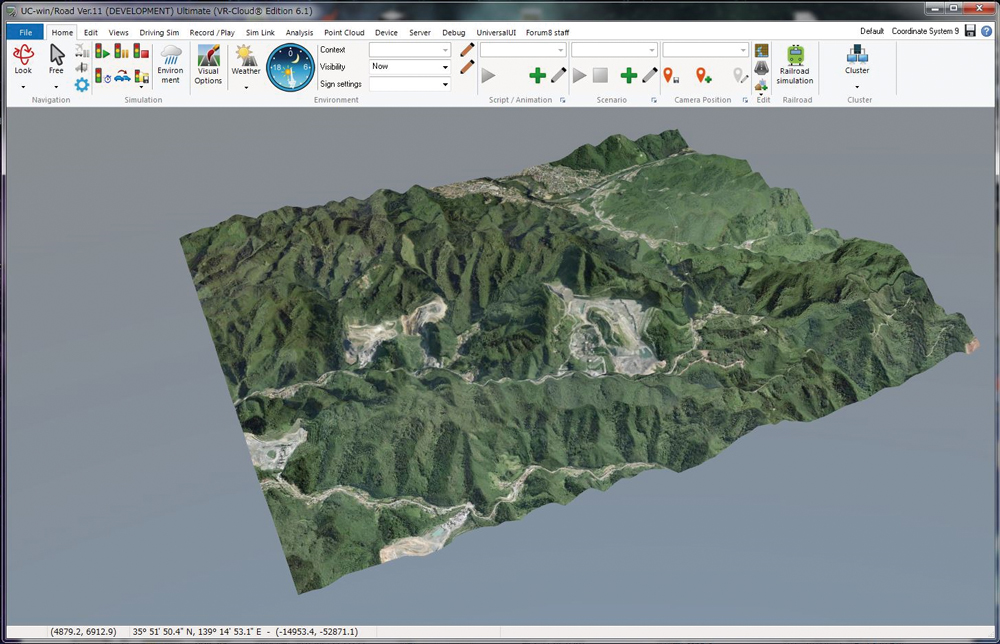
1.地形空间的扩大和分解能力的提高
一直以来使用的是标准日本地图20km×20km、地形网格扩大为400km×200km等,在广大的地形上可表现长距离道路的模拟,并可制定更加细致的 网格,实现更加逼真的地形表现。
 |
| ▲图1 地形空间的扩大 |
2.配置模型数的扩大
模型几何学信息当中可以不受4GB的限制进行配置。特别是模拟都市空间时有效,对每个建筑物进行建模时也可轻松表示。
3.高品质材质
地表面、路面、模型等材质可处理的材质量的界限大幅扩大,可实现更加丰富的表现。例如路面材质模型的材质可以处理的材质量的界限大幅扩张,可实现更加丰富 的表现。例如路面材质的往返间隔变大,或是增加断面将材质微妙改变使它可以自然表现等,更加沉浸感。
4.关于解析结果的可视化
海啸解析、泛滥解析、风解析、音响解析等包含动画步骤结果的可视化需要非常大量的内存。到目前为止实现非常困难的长时间可视化模拟也成为可能。
64bit对应的今后拓展预定
伴随着64bit可以期待的拓展预定的插件如下所示。
度
在计算机当中表现数值时,保存实数的寄存器的种类不同精度将发生不同。与单精度与倍精度,前者的有效位数为7位1个数据 有4bit,后者则为15位消耗倍以上的容量。UC-win/Road当中可优先使用效率使用单精度,64bit化时的内存的限制事实上也不存在,今后将 扩展他并变为倍以上的精度。因此可提高纬度经度于直角坐标的相互交换的信赖性的提高,驾驶模拟当中微妙的方向盘操作进行方向的细致的平移,倾斜,翻滚以及 照相机的方向向量的精度也倍增的情况下可进行方向转换。
点云建模插件
点云数有最大7000万点的限制增加到可读取5亿点以上。帮助编辑功能,提供部分删除,点云解析提供的网格化。
海啸插件
导入流速的解析结果,流速方向可使用向量进行动画可视化。OpenGL着色器可实现更加高速的动画表现。