一般來說在windows 64bit OS為了直接啟動32bit App,會在64bit地址空間上啟動作為32bit OS作用的WOW64(Windows on Windows64),讓其在32bit空間當中動作。並且,32bit App的內容使用限制在4GB以內。
因為對應64bit,PC的資源可得到更加完整的應用。可使用4GB以上的記憶體量,沒有WOW64的中間介入,可期待其速度提升。
UC-win/Road拓展功能
可以期待64bit化會有各式各樣的功能提升,以下是代表性事例。
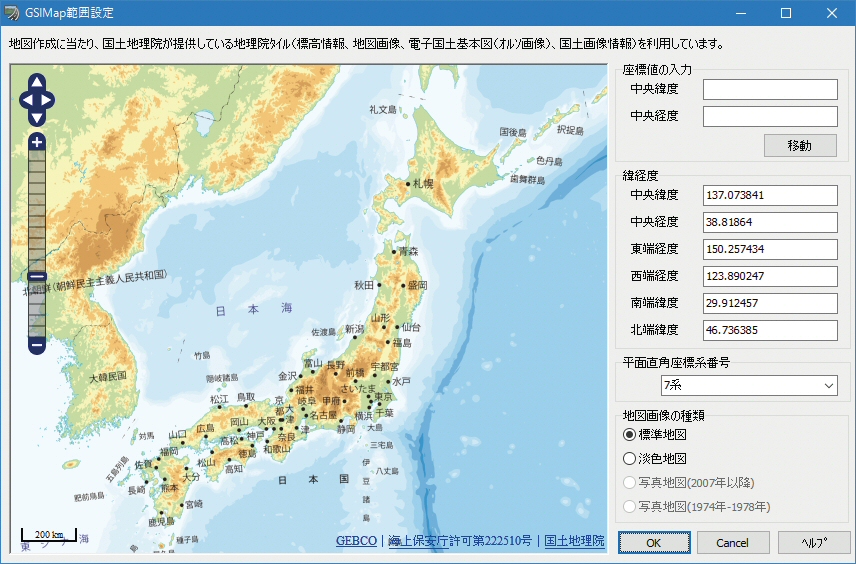
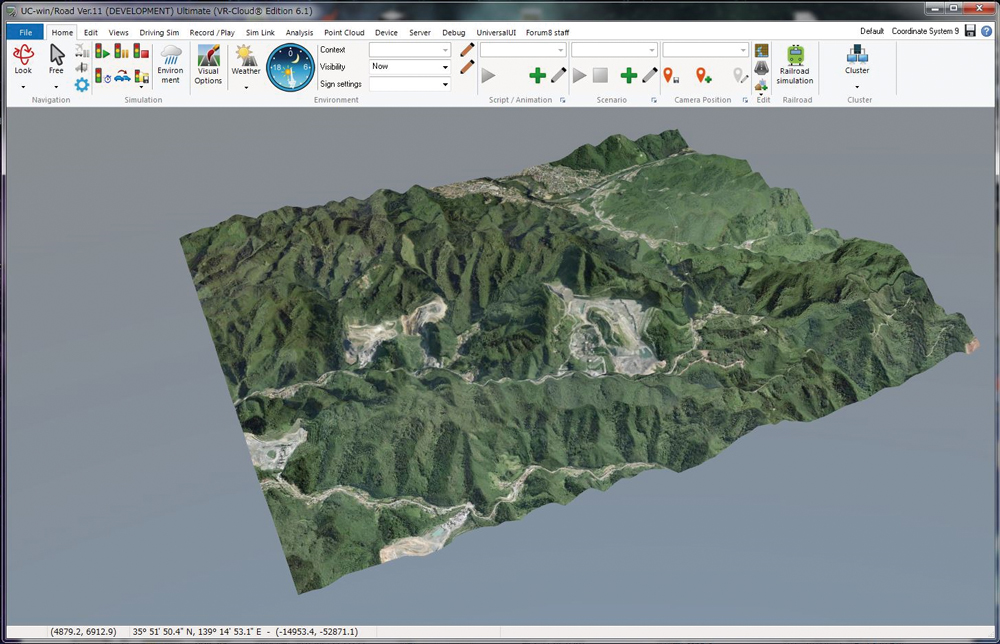
1.擴大地形空間和提高分解能力
一直以來UC-win/Road使用的是標準日本地圖20km×20km,在新版本當中隨著地形網格擴大為400km×200km,將可在廣大的地形上表 現長距離道路的模擬,並可制定更加細緻的網格,使地形表現更加逼真。
 |
| ▲圖1 地形空間的擴大 |
2.配置模型數的擴大
模型幾何學資訊可不受4GB的限制進行配置。特別是模擬都市空間時有效,每個建築物進行建模時也可輕鬆表示。
3.高品質材質
地表面、路面、模型等材質可處理的材質量的界限將大幅擴大,使表現方式更加豐富。例如路面材質的往返間隔可變大及増加斷面將材質微妙改變使它可以自然表現等,増強沉浸感。
4.關於解析結果的可視化
海嘯解析、氾濫解析、風解析、音響解析等包含動畫步驟結果的可視化需要非常大量的記憶體。並且到目前為止實現困難的長時間可視化模擬也成為可能。
64bit對應的今後拓展預定
伴隨著64bit的開發可以期待的拓展預定的插件如下所示。
空間數值精度
在電腦當中表現數值時,根據保存實數的寄存器的種類不同精度也不同。單精度與倍精度當中,前者的有效位數為7位,1個數據有4bit,後者則為15位可消耗倍以上的容量。UC-win/Road當中優先記憶體使用效率而使用單精度,但在64bit化時的記憶體的限制事實上也不存在,今後將有望變為倍以上的精度。因此可提高緯度經度與直角坐標的相互交換的信賴性的提高,駕駛模擬當中微妙的方向盤操作進行方向的計算時的細緻的平移、傾斜、翻滾以及照相機的方向向量的精度也倍増,可進行方向轉換。
點雲建模插件
點雲數有最大7000萬點的限制増加到可讀取5億點以上。幫助編輯功能,提供部分刪除,點雲解析提供的網格化。
海嘯插件
導入流速的解析結果,流速方向可使用向量進行動畫可視化。OpenGL著色器可實現更加高速的動畫表現。