 |
 |
|
本連載は、「組込システム」をテーマとしたコーナーです。大手メーカー新規商品、特注品、試作機等の組込システムを約30年間に渡って開発してきた実績にもとづいて、毎回さまざまなトピックを紹介していきます。第17回は、様々な開発や実験環境にご利用頂けるAUTOSARを経由した車と、UC-win/Roadの連携システムについて紹介いたします。
| 執筆 組込システム開発チーム | |
|
VRシステムをはじめとした関連分野における展開を推進。組込システム開発、マイコンソフトウェアの受託開発、コンサルティングを中心とした事業を展開。 |
|
AUTOSARとUC-win/Road連携

■AUTOSARとは
近年は自動車の電子化が進み、マイクロコンピュータが100個以上搭載されるような車も存在し、自動車開発においてソフトウェアの開発の大規模化・複雑化が進んでいます。さらに、MaaS(Mobility as a Service)や次世代交通システムなどの車と連携した様々な開発が進みつつあります。このため、自動車業界において効率的にソフトウェア開発が行える環境の重要性がますます大きくなってきています。この問題を解決するために、2003年に自動車業界のグローバル開発パートナーシップであるAUTOSARが発足しました。AUTOSARは自動車業界全体が一丸となって過去のソフトウェア資産を有効活用し、可能な限り開発コストを縮小させる「開発工程の自動化」を進める標準化を行っています。AUTOSARは車載電子制御ユニット用の共通標準ソフトウェアアーキテクチャを策定・確立することにより、さまざまな車種やプラットフォームに対応できる拡張性、ソフトウェアの可搬性・可用性を実現しています。また、進化していくソフトウェアと車載電子制御ユニットを管理してパフォーマンス・安全性・ライフタイムにわたった製品の更新などに取り組んでいます。これにより、アプリケーションとハードウェアの間にAUTOSARに準拠した車載ソフトウェアがあれば、ハードウェアに合わせてアプリケーションを変える必要がなくなり、アプリケーションの再利用が容易になり、効率的な開発を実現することができます。また、メーカの異なるアプリケーション間で通信プロトコルを意識せずに連携が可能になります。
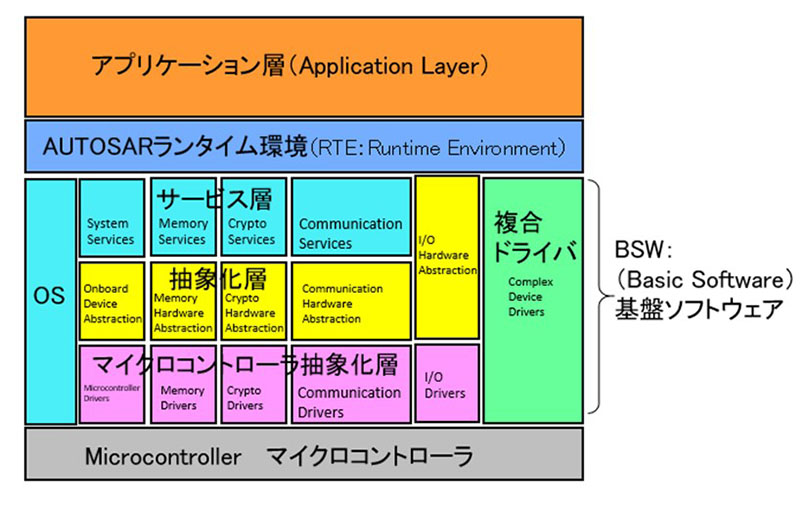
AUTOSARのアーキテクチャは、アプリケーション層、AUTOSARランタイム環境、基盤ソフトウェアの3つの階層で構成されています。
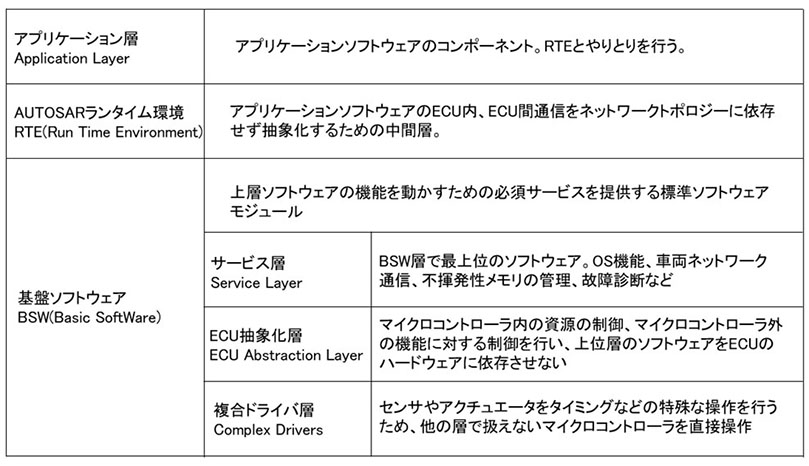
AUTOSARはBSW(Basic SoftWare)モジュールを記述する一連の仕様書を提供、アプリケーション・インタフェースを定義し、標準交換フォーマットに基づく共通の開発方法論を構築しています。
■運転シミュレータUC-win/RoadとAUTOSARのソフトウェアと連携
車載関連のさまざまなセンサ・機器・サービスを連携させた実車実験の評価を行うことはハードルが高く、実車実験前の評価を入念に行う必要があります。このためには個別に十分評価された各社の車載ソフトウェアが揃うことが前提となります。そのため新規企画の試作システムの実車実験を容易に行うことは困難であり、実車状況をできる限り再現したシミュレーション環境を構築し試作実験を行う必要があります。これを実現するためには、既に開発された実車ソフトウェア資産を利用して、必要最小限の新規試作開発を連携させることで実車に近い評価を効率的に行うことが必要です。
UC-win/Roadは車の運転情報や制御情報を取得しマルチモニタ環境でのVRによる走行シミュレーションを行うだけでなく、音響装置や振動装置と連動して限りなく実運転に近い環境を実現できます。また、交通流シミュレーションや車線からの距離の管理なども行え、視線追跡などとも連動できます。AUTOSARは、必要な車載ソフトウェアを容易に、安全に、確実にシミュレーション環境に統合させることが可能です。AUTOSARソフトウェアとUC-win/Roadを連携することにより、AUTOSAR上の既存ソフトウェアを活用した実車に近い様々な実験シミュレーションを行うことが可能になります。これにより、新たな企画のための試作開発において、容易に実車実験近い評価を行い、より斬新な企画や高品質なシステムの開発を行うことが可能になります。
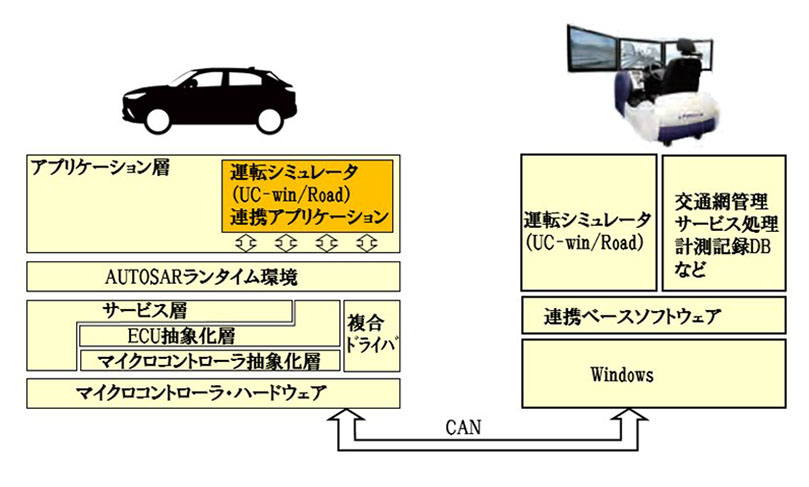
シミュレーションシステムの基本的な構造を上図に示します。AUTOSARソフトウェア構造のアプリケーション層に運転シミュレータ連携ソフトウェアを構築します。運転シミュレータ連携ソフトウェアは、AUTOSAR ECU上の情報をCAN通信により連携ベースソフトウェアに送ります。連携ベースソフトウェアがUC-win/Roadドライブシミュレータと新規開発のサービスソフトウェアとを連携させることで、様々なシミュレーションを行うことが可能になります。また連携ベースソフトウェアは、分析のための計測記録データベースと接続し、実験評価中のドライバの生体情報などの様々な測定情報を収集記録します。蓄積された評価結果に対してAIを用いたダイナミンクな分析を行うことなどによりシステムの有効性や新たな気付きを抽出できます。
■スマートカーへの展開
AUTOSARは、制御系から自動運転や交通サービスシステムに対応した展開が進められています。これによりフォーラムエイトのVR技術やシミュレーション技術を車に搭載することが可能になり、スマートカー運転システムを構築することが可能になります。
例えばシミュレーション技術を車に搭載し、周辺の車や対向車の4K画像から自車との距離・速度・車線の位置やはみ出しなどを抽出し、車ごとの運転動作を分析することにより、乱暴な運転や熟練していない運転などの性質を特定することができます。それらから運行予測を行い、事故の可能性を把握できます。
また、危険な歩行者や二輪車の解析も行えます。事故の可能性はVR技術を搭載したダッシュボードのデジタルコックピット化により、高度な表示技術を通じて瞬時に起こり得る事故の可能性と理由を運転者に伝達することができます。運転者はこれにより早い段階で事故回避運転を行うことが可能になり、快適な運転を行うことが可能になります。
インターネットに接続することよりすべての車の危険車両や注意車両などの情報をセンター管理し、周辺の車との情報交換を行えば、より高度な解析による運転状況予測も可能になります。さらに、解析技術を用いることにより、安全・安心運転や省エネ運転支援だけでなく、音声・画像情報から高度な車の盗難防止などへの応用や様々なサービスと連携したスマート運転支援を行うことが可能になります。

フォーラムエイトはVR技術や解析技術をベースに、AUTOSARの環境を用いた様々な実運転シミュレーション環境の構築、未来のスマートカーや交通サービスシステムの開発受託や支援をさせていただきます。

超スマート社会のためのシステム開発
■著者 : 三瀬 敏朗 約30年間に渡って大手メーカー新規商品、特注品、試作機やマイコンソフトウェア等の受託開発に携わった豊富な経験にもとづいて、これからのスマート社会を支える上で不可欠な組込システム開発の考え方・知識・手法を紹介。システムを扱う経営、企画、開発、品質保証、発注/受託に関わる方は必読の手引き書です。
|
(Up&Coming '22 新年号掲載)
|
||||||||

 Up&Coming |
