
プログラム概要
Lily Carは縮小モデルの自律走行車で、実車の挙動をスモールスケールでエミュレートし、セルフドライビングカーのような小さな車の開発に役立てることを目的としています。
近年、自動車産業におけるロボット技術の需要が急速に増加しています。特に、運転ができない人(視覚障害者や子供など)が利用する場合の自律的走行および安全性の強化における需要は非常に大きなものとなっています。
図1はLily Carのプロトタイプで、1/10 RC Carのシャーシ、モータ、ステアリングモータ、衝突判定のための赤外線測距センサ、車両追跡するARマーカー、PC遠隔操作によるコミュニケーションや制御を可能とするワイヤレスモジュール、全システムの管理を行うメインコントローラで構成されています。
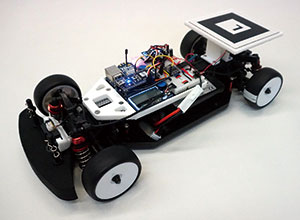
▲図1 Lily Car プロトタイプ
プログラムの機能と特長
自律走行デモシステム
フォーラムエイトでは現在、自律走行のデモを行うシステムを開発中で、そのサブシステムは次の3つとなります。
Lily Car2台1セット、AR(拡張現実)をベースとしたリアルタイム3D追跡システム (Aurelo、図2)、3D バーチャルリアリティ環境で可視化が可能なUC-win/Road(図3)。図4はシステム全体の写真です。
現行のシステムでは、車は事前に複数のパスが定義されたテストコース上を自律的に走行します。マニュアルモードと自律走行モードの切り替えは常時可能となっており、PC制御インターフェースとAureloシステムとを連携して、各車の位置と方向の情報を取得します。さらに、車へ適切なコマンドを送信し、選択したパスに従って走行させます。現段階では、PCの制御による経路設計および意思決定プロセスは実現しています。
今後はそれらを車のメインコントローラから制御できるような開発を進め、位置データのみを車に送信してGPS情報と車載センサのデータに基づいて自律的に走行するセルフドライビングカーをエミュレートします。また、車が想定外の挙動を示した場合、常に衝突回避のための制御が行えるような監視システムも開発していく予定です。
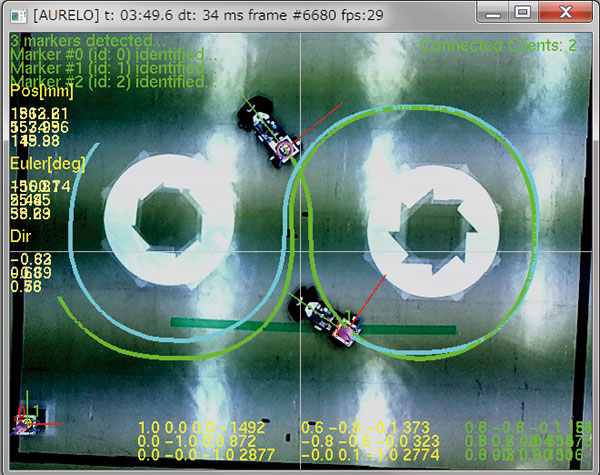
▲図2 Aurelo 3D 位置決定システム

▲図3 UC-win/Roadによる可視化

▲図4 自律制御システム
