 Now in development
Now in development |
UC-win/Road for
RoboCar plug-in option is an integrated simulation system with car robotics
platform scale model car "RoboCar" and real time VR "UC-win/Road".
VR simulation system
can be used to control 1/10 electric car scale model on model road. This can be
performed by integrating "UC-win/Road", which is the virtual reality soft with
well-developed driving simulation function and "RoboCar", which is the car
robotics platform mounted robot technology.
This system allows users to create precision space images, many
different styles of traffic environment and scenarios by using virtual space in
VR, and experiment with them. It can be used for research development of car
robotics including autonomous driving, advanced safety vehicle, and ITS.
visit: UC-win/Road for
RoboCar page to see the movie
|
 |
|
 |
| Running RoboCar(R) in the
office |
 |
|
 |
| Creating the driving environments and
running in VR space can be performed. |
|
Case example of UC-win/Road for
RoboCar(R) |
 |
| Setting windows of RoboCar's
vehicle performance |
 |
| Various driving environments
and interaction can be supposed |
|
| Scale model car powered by robotic technology
(ZMP) |
| RoboCar(R) RoboCar & SDK 2010>> UC-win/Road SDK |
Sophisticated environment
recognition platform
- Stereo camera image processing module
With
the built-in stereo camera and image processing module, realize real time image
processing and experiments on autonomous motion algorithms inside a
laboratory.
- Infrared distance sensors
The platform is equipped with infrared
sensors that can be used for obstacle detection, parking assistance, etc.
Sensors are placed on the front, rear and flanks of the car, users can freely
decide of their location.
- Small size laser range finder
As an
option, a small laser range finder can be mounted on the platform. It is very
useful to achieve a real autonomous motion system.
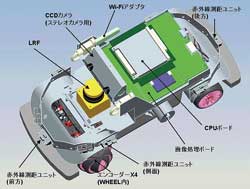 |
| Structure of the
platform |
Electric car scale model
- Electric car system
As the ECU (Electronic
control unit), main controller that controls the motor driver, the main motor
and the servo motor for the steering gear. We propose a real electric car
system.
- Wireless remote control
Using the Wi-Fi
module, you can control the model car remotely from a PC or remote controller.
It is useful for research that need direct human control of the vehicle.
Use case examples
Test
of obstacle avoidance algorithm
Research on autonomous
driving
|
|
|
| Joint marketing
agreement by and between FORUM8 and
ZMP |
Driving simulator of FORUM8 and Robo car(R), car robotics platform by
ZMP will be linked.
FORUM8
and ZMP have agreed on the mutual cooperation to accelerate the development of
cars, next generation mobility system and autonomous moving robots.
In the
initial phase, "UC-win/Road for RoboCar", VR simulation system is being
developed. It links "UC-win/Road", VR software by FORUM8 and "RoboCar (R)", car
robotics platform by ZMP.
It allows the simulation of autonomous mobile
robots as well as cars for office cleaning and security and conveyance of the
plant, both in the virtual and the real environment .
The second phase will
involve the development of VR simulation system which can detect the driver's
driving posture and driving trend by linking "UC-win/Road" and "e-nuvo IMU-Z",
ZMP's 9-axis motion sensor.
|
|
Overview
The
standard feature of the current UC-win/Road allows 4 channel displays
per PC.
FORUM8
is currently developing UC-win/Road cluster system to increase the number of
channels to display screen image.
This system can
synchronize multiple PCs and project images to multiple monitors. Increased
channels lead to more effective immersion because of the enlarged projection
area. The system will be applicable to simulator with 360 degree cylindrical
screen, conference room and the simulation in control room.
Features
- Allows easy settings and
operations
- Flexible system with no limitations to the
number and configuration of clustered PCs
- All functions of UC-win/Road can be used on clustered
configurations
- Improved performance on clustered system
compared with single PC system
- A multi purpose system for various
simulations, because all elements are synchronized on the system
 |
| synchronization
of flags, fire and smoke, vehicles and
snow |
Implementing clustered system
Multiple PCs are inter-connected on LAN and one PC
calculates for the simulation. The result is sent to other machines for
displaying, which processes images. In this system, a machine to perform
simulation is called "server" and machines to display images are called "slave
machines". The calculation and processing images are performed as
follows.
-
A simulation calculation
for each displayed flame
- Sends data, which is necessary to show
flames to slave machines
- While the slave machines process images,
the server calculates data, which are necessary for the next
flame.
- The server can receive data of the next
one flame while processing images, when the calculation of the server (3) ends
earlier than the processing. This optimization minimizes the influence of data
sending/receiving time. Multi cast IP is employed to send data to the slave
machines. It minimizes the work load of server machines and
networks.
- After image processing finishes, the
server will perform the next calculation and data sending.
In the
cluster system, 1 server machine basically performs simulation and slave
machines solely process images. Because of the distributed processing, the
system will realize improved performance. Since the former UC-win/Road version
processes the calculation in a single thread except for the traffic, it required
independent processing of calculation and processing images. As a result of
optimized use of multi CPU and multi-core CPU on the standard configuration of
the UC-win/Road, we can see the improved performance of 3D trees, flags,
clothes, fire and smoke and the animation of MD3 characters.
The data, which server
sends to the slave machines, are the information and attribute of moving
elements. Each slave machine processes image after receiving data and updating
3D space. Since the amount of information becomes huge when processes
complicated shapes such as 3D trees, flags, clothes and rain and snows, it is
impossible to send these kinds of data with high speed on network.
Therefore, for the processing of these
objects, server sends minimum parameters for the calculation and the slave
machines processes the calculation.
About the function
Since it has additional functions necessary for clustering based on
the standard UC-win/Road, the system has all the features of the standard
UC-win/Road. To minimize operations of slave machines, all the operation except
for the initial settings can be done on server machines. At the time of
simulation, operation is done by server machine and visualization is done by
slave machines. The cluster system is operable only with following settings and
using function.
| Initial setting of slaves |
slave machine name,
network address of server |
| Server |
displayed area by slave
machines |
| cut out of slave
machines |
| restart, shut down and
data import of slave machines |
| switching to server/
standard mode or automatic start of server mode |
| simulation start/
end |
Performance
benchmark
We benchmarked the performance to check the validity
of this system. We have found its improved performance compared with the
standard UC-win/Road system and that the number of clustered PC does not affect
the performance. In addition, by comparing 4channel configuration of clustered
with the standard, we have seen the improvement by 140%. By comparing 15 slave
machines and standard 1 channel, we have seen the improvement by 20
%.
 |
| Cluster configuration, how to
process separately |
Future development
The basic function of the cluster system is to realize synchronized
display of one virtual reality environment on multiple PCs. The function
improves the sense of immersion and the system is applicable to other usage than
the improved sense of immersion. For example, single image of VR is broadcasted
to people and driving simulation by a number of people in the same VR
environment is done, taking the interaction with other people into account.
|

|
3D VR in a Cloud Computing environment!
Now in
development |
| This system utilizes the general mechanism of SaaS. Users are able to
remotely operate inside the UC-win/Road environment that is run by
the server and received by the client on a lighter version of the software. UC-win/Road for
SaaS has adapted Adobe Flash Player technology, one of the most popular
client engines. As well as being an online video streaming service, which is
becoming very prominent at the moment, UC-win/Road for SaaS is an interactive
real-time VR system. |
|
| Related information |
"Cloud Computing
Expo"(May 12th-14th, Tokyo) video report is on "DigInfo News".
"UC-win/Road
for SaaS enables 3D VR in a cloud computing environment"
English:
|
Program features

|
|
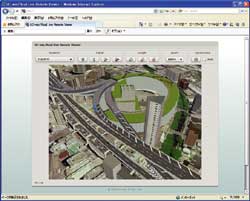
Real time 3D model preview
from remote Web
browser
Grand Prix winner of the 8th 3D VR Simulation Contest, 2009
"VR Data for Ohashi Junction of Metropolitan
Expressway"
Metropolitan Expressway Company Limited
8th 3D VR
Simulation Contest review |
| Interactive view operation, changing view by mouse
dragging |
|
 |
|
 |
| Enabling various kinds of virtual 3D
space such as driving and traffic simulation |
|
Users can use wide varieties of visual
option including fire and smoke, lighting, shadow, weather and
etc. |
Data share and publication
Publishing VR Model on the Web
-
Open Web
Access
| VR Model made by UC-win/Road can be published on the web for anyone
to access and follow the project in VR environment. Since VR spaces can be
manipulated freely, it will attract interest from wide range of people. By
publishing large-scale VR model, which can be easily updated using the functions
of UC-win/Road, we anticipate that this system will be a great tool to gather
and respond to feedback from
clients. |
- Web Seminar and Internet Broadcast
|
Web seminars, using only
UC-win/Road, will be possible. Using the presentation and simulation features of
UC-win/Road, presentations and demonstrations can be given to dozens of online
attendees. The host can operate
UC-win/Road on a PC and attendees can access the data using internet browsers.
In addition, by connecting the video streaming server which is available
separately, broadcasting to large amount of people becomes possible.
|
- SaaS Clustering Configuration
|
All users can share the
same VR environment including traffic conditions, time and weather by using
UC-win/Road cluster
configuration.
|
System feature
- Features
|
The following features are
available to the users accessing the VR model remotely using the client
engine.
1. Selection of previously-saved
viewpoints
2. Panning using the
mouse
3. Selection of contexts (VR
environment settings)
4. Travel on road and flight
paths
5. Script
execution
Using one PC, acting as the
server and running a standard copy of UC-win/Road, the host can set the maximum
number of clients, the password and the incoming port number, making it easy to
begin and end sessions.
|
- Data Transfers
|
This program employs HTTP
as the server-client communication protocol. The server connects to the Flash
client and sends images, and then the client receives operation commands. Image
Transfer uses the H263 codec, which is compatible with Flash, and the resolution
and the compression can be altered. When the connection speed with the client is
slow, the frame rate is automatically reduced so that the image runs
smoothly.
|
- Server and Cluster Configuration
|
Since the number of clients
connected to one server is limited, you can configure multiple servers. Multiple
servers can be synchronized by using UC-win/Road clustering
option.
|
Related Functions
Functions of UC-win/Road
for SaaS can also be used for uses other than for SaaS.
Virtual Camera Devices and DirectShow Filters
|
These are UC-win/Road real-time video outputs. We developed
UC-win/Road Virtual Camera and DirectShow filters so that it can link with other
applications that use video capturing devices. The images generated by
UC-win/Road are sent to the Virtual Camera, which is interpreted by the OS as a
standard camera device. Since these images can be transferred over the network,
UC-win/Road and the Virtual Camera can be used on individual PCs. This function
enables the following applications: |
- Meetings combined with instant
messaging service
| Meetings combined with instant
messaging service. Using UC-win/Road Virtual Camera instead of webcams in
video-enabled instant messaging programs allows you to send UC-win/Road
images. |
- Recording and editing videos
| Since most video editing applications can import video captured by
cameras, users can connect directly to video editing applications without using
intermediary file using virtual camera and DirectShow
filters. |
- Video streaming server
Images can be obtained remotely using network communications. The
obtained data can be processed by the video streaming server using the Virtual
Camera device and the Direct Show Filter and broadcasted to a large number of
people.
|
|
|
 Now in development
Now in development |
Combination of SENSO-Wheel and CarSim
enables highly realistic driving experience inside
UC-win/Road
Main Features
and Functions
- Haptic Technology
Realistic
feedback can be achieved using SENSO-Wheel, which sends information about the
steering and in turn, receives simulation data from UC-win/Road.
- Parameter Settings
Apart from feedback, friction, damping and spring rate can be
adjusted
-
Calibration
The central position of the steering wheel and its maximum
rotation can be adjusted freely.
What is SENSO-Wheel?
- Function
SENSO-Wheel is a steering wheel controller with haptic
technology, developed by SENSODRIVE.
The motor inside the steering wheel allows the controller to
simulate a realistic feedback of vehicles.
Main Usage Examples
|
CarSim
8.02
CarSim
is a simulator that is developed by Mechanical Simulation Corp. that
can be used to analyze and evaluate the physical feedback of passenger and small
commercial vehicles in various driving and environmental conditions.
|
|
|
|
Up coming conference and trade
shows
|
FORUM 8
will participate following conference
SimTecT2010
Monday 31 May - Thursday 3 June, Brisbane,
Australia
http://www.siaa.asn.au/simtect.html
Seminars in Shanghai will be held on the following
schedule.
Venue:
Shanghai - Shanghai Seminar room (FORUM8
Technology Development(Shanghai) Co., Ltd) MAP
Seoul : FORUM8 Korean Office, Seoul Address
| Seminar |
Date |
City |
| UC-win/Road
VR |
June 16th ,
2010 |
Seoul |
| July 8th,
2010 |
Seoul |
| UC-win/Road
Advanced |
June 22nd,
2010 |
Seoul |
Engineer's
Studio,
UC-win/FRAME
(3D) |
June
3rd,
2010 |
Shanghai |
| July 16th, 2010 |
Seoul |
| xpswmm (Road for
xpswmm) |
July 29th, 2010 |
Shanghai |
| Maxsurf |
June 24, 2010 |
Shanghai |
| OSCADY/TRANSYT |
June 8, 2010 |
Seoul |
| July 6, 2010 |
Shanghai |
| Multiframe |
July 13, 2010 |
Shanghai |
| DesignBuilder |
July 20, 2010 |
Shanghai |
| Participation
Fee |
| Participation
Fee |
Free |
For more
information and applications, please email us
at
mailto:forum8@forum8.co.jp
Gross
circulation: 4069
To subscribe this
page, go to http://www.forum8.co.jp/english/p-mail-e.htm
If
you would like to unsubscribe from our newsletters, please include "Unsubscribe"
in the subject title of your email and send it back to us.
Thank you
for your continued support.
FORUM8 Co., Ltd. mailto:forum8@forum8.co.jp
2-1-1
Nakamegruro GT Tower 15F
Kamimeguro Meguro-ku Tokyo 153-0051 JAPAN
TEL
+81-3-5773-1888
FAX +81-3-5720-5688
http://www.forum8.co.jp/english/index.html
|


